说明:配置该教程时所使用的是Ubuntu20.04
1 海洋与无人船仿真环境搭建
cp -r ~/XTDrone/sitl_config/usv/* ~/catkin_ws/src/
cd catkin_ws
catkin build # or catkin_make说明:由于官方所编写的脚本时几年之前的,所以很多东西不符合现在运行环境,因此编译时会出现很多报错,这是正常的,只需要按照提示进行修改就行。下面将是详细的报错解决办法,此外,为了节省解决报错的时间,我已将所有与关于本次配置相关的修改过的CmakeList.txt文件完整版均放在文章末尾,只需按照你的路径进行相应的修改即可使用,记得每次修改后要先保存再进行编译。
警告1

文件目录:/home/你的主机名/catkin_ws/src/wave_gazebo_plugins


这个警告指的是CMake策略CMP0054的旧行为即将被移除。CMake策略用于控制构建过程中的某些特定行为,当一个策略被标记为旧(OLD)时,意味着它在未来的CMake版本中可能会被移除,应该尽量使用新的(NEW)行为。
解决方案
为了消除这个警告,可以更新CMakeLists.txt文件中对应的策略设置。你可以查找并更新或添加以下行以使用新的行为:
cmake_policy(SET CMP0054 NEW)
具体步骤如下:
-
打开
CMakeLists.txt文件。 -
找到第25行(或者附近)使用了
cmake_policy指令的地方。 -
确保这一行是:
cmake_policy(SET CMP0054 NEW)
或者,如果没有这行指令,可以添加:
cmake_policy(SET CMP0054 NEW)
为什么会有这个警告?
CMake策略CMP0054涉及到如何处理if命令中的不明确表达式。在设置为旧行为(OLD)时,CMake会把字符串"0"、"FALSE"等视为布尔假值。在新行为(NEW)中,只有明确的布尔假值(例如OFF、NO等)会被视为假。
警告2 (usv_gazebo_plugins的也同理)
文件目录:/home/你的主机名/catkin_ws/src/usv_gazebo_plugins

警告3


修改后的内容:用以解决警告(修改后记得保存)
std::string ShapeVolume::Display()
{
switch (type)
{
case ShapeType::None:
return "None";
case ShapeType::Box:
return "Box";
case ShapeType::Cylinder:
return "Cylinder";
case ShapeType::Sphere:
return "Sphere";
default:
return "Unknown"; // 或者一个适当的默认值
}
}
警告4
OLD->NEW即可
文件目录/home/你的主机名/catkin_ws/src/wamv_gazebo


警告5
同理,但是有两个地方,文件路径/home/ray/catkin_ws/src/vrx_gazebo


报错1

这意味着编译过程中尝试运行 python,但系统找不到这个命令。这通常是因为系统中没有安装 Python,或者 Python 安装在一个不同的路径下,或者系统中默认的 Python 解释器名称是 python3 而不是 python。
解决方案
以下是几种可能的解决方法:
-
创建符号链接: 如果系统中安装了 Python 3,但没有
python命令,可以创建一个符号链接,将python指向python3:sudo ln -s /usr/bin/python3 /usr/bin/python -
修改脚本使用
python3: 如果可能的话,找到调用 Python 的地方,将python改为python3。例如,在 CMakeLists.txt 或相关脚本中:/usr/bin/env python3 -
安装 Python: 如果系统中没有安装 Python,可以安装 Python。对于 Ubuntu 或其他基于 Debian 的系统,可以使用以下命令:
sudo apt update sudo apt install python2如果需要安装 Python 3:
sudo apt update sudo apt install python3
查找和修改脚本
a.查找项目中使用 python 的地方:
grep -r "/usr/bin/env python" /home/ray/catkin_ws/src/vrx_gazebo
这将显示所有包含 "/usr/bin/env python" 的文件路径。

b.编辑这些文件:
使用文本编辑器打开这些文件,并将 python 改为 python3。例如:
#!/usr/bin/env python3
完成上述步骤后,重新运行编译命令:
cd catkin_ws
catkin build
再次编译之后,又会出现新的警告和报错
警告1

这个警告是关于 CMake 的策略 CMP0048 的,它指出在 CMakeLists.txt 文件中的 project() 命令没有显式设置项目的版本信息,导致一些相关的 CMake 变量可能会被设置为空。这种警告通常不会导致编译失败,但建议根据最新的 CMake 策略设置来更新项目文件,以避免潜在的问题。
解决方案
由于其版本较老,不适合现在的应用,所以,最好对整个CMakeLists.txt 文件进行修改,修改后的文件如下:(可复制粘贴)
cmake_minimum_required(VERSION 3.0)
project(wave_gazebo_plugins VERSION 1.0.0)
###############################################################################
# Compile as C++11, supported in ROS Noetic and newer
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# Set policy for CMake 3.1+. Use OLD policy to let FindBoost.cmake, dependency
# of gazebo, use quoted variables in if()
if(POLICY CMP0048)
cmake_policy(SET CMP0048 NEW)
endif()
###############################################################################
# Other dependencies...
find_package(catkin REQUIRED COMPONENTS gazebo_ros)
find_package(gazebo REQUIRED)
find_package(Eigen3 REQUIRED)
###############################################################################
# Catkin...
catkin_package(
INCLUDE_DIRS include
LIBRARIES
Hydrodynamics
WavefieldModelPlugin
WavefieldVisualPlugin
wavegauge_plugin
DEPENDS
gazebo_ros
)
###############################################################################
# Libraries...
# Hydrodynamics
add_library(Hydrodynamics
SHARED
src/Gazebo.cc
src/Geometry.cc
src/PhysicalConstants.cc
src/Physics.cc
src/Utilities.cc
src/Wavefield.cc
src/WavefieldEntity.cc
)
target_include_directories(Hydrodynamics
PRIVATE
${PROJECT_SOURCE_DIR}/include
${Boost_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
${GAZEBO_INCLUDE_DIRS}
${GAZEBO_MSG_INCLUDE_DIRS}
${IGNITION-COMMON_INCLUDE_DIRS}
${IGNITION-MATHS_INCLUDE_DIRS}
${IGNITION-MSGS_INCLUDE_DIRS}
)
target_link_directories(Hydrodynamics
PRIVATE
${GAZEBO_LIBRARY_DIRS}
${IGNITION-COMMON_LIBRARY_DIRS}
${IGNITION-MATHS_LIBRARY_DIRS}
${IGNITION-MSGS_LIBRARY_DIRS}
)
target_link_libraries(Hydrodynamics
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
)
target_compile_features(Hydrodynamics PRIVATE cxx_std_14)
target_compile_options(Hydrodynamics PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_LIBRARIES_LIST Hydrodynamics)
###############################################################################
# Plugins...
# WavefieldModelPlugin
add_library(WavefieldModelPlugin
SHARED
src/WavefieldModelPlugin.cc
)
target_link_libraries(WavefieldModelPlugin
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${WAVE_GAZEBO_LIBRARIES_LIST}
)
target_compile_features(WavefieldModelPlugin PRIVATE cxx_std_14)
target_compile_options(WavefieldModelPlugin PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_PLUGINS_LIST WavefieldModelPlugin)
# WavefieldVisualPlugin
add_library(WavefieldVisualPlugin
SHARED
src/WavefieldVisualPlugin.cc
)
target_link_libraries(WavefieldVisualPlugin
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${WAVE_GAZEBO_LIBRARIES_LIST}
)
target_compile_features(WavefieldVisualPlugin PRIVATE cxx_std_14)
target_compile_options(WavefieldVisualPlugin PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_PLUGINS_LIST WavefieldVisualPlugin)
# WavegaugePlugin
add_library(wavegauge_plugin
SHARED
src/wavegauge_plugin.cc
)
target_link_libraries(wavegauge_plugin
WavefieldModelPlugin
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${WAVE_GAZEBO_LIBRARIES_LIST}
)
add_dependencies(wavegauge_plugin WavefieldModelPlugin)
target_compile_features(wavegauge_plugin PRIVATE cxx_std_14)
target_compile_options(wavegauge_plugin PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_PLUGINS_LIST wavegauge_plugin)
###############################################################################
# Executables...
###############################################################################
# Tests...
if(CATKIN_ENABLE_TESTING)
catkin_add_gtest(UNIT_Wavefield_TEST src/Wavefield_TEST.cc)
target_link_libraries(UNIT_Wavefield_TEST ${WAVE_GAZEBO_LIBRARIES_LIST})
target_compile_features(UNIT_Wavefield_TEST PRIVATE cxx_std_14)
target_compile_options(UNIT_Wavefield_TEST PRIVATE "-Wno-unknown-pragmas")
endif()
###############################################################################
# Install
install(
TARGETS
${WAVE_GAZEBO_LIBRARIES_LIST}
${WAVE_GAZEBO_PLUGINS_LIST}
wavegauge_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
install(
DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.hh"
)
install(
DIRECTORY ${CMAKE_CURRENT_BINARY_DIR}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.pb.*"
)
警告2 同理进行修改即可

修改后的完整文件:
cmake_minimum_required(VERSION 3.0)
project(usv_gazebo_plugins VERSION 1.0.0)
# Set policy for CMake 3.1+. Use OLD policy to let FindBoost.cmake, dependency
# of gazebo, use quoted variables in if()
if(POLICY CMP0048)
cmake_policy(SET CMP0048 NEW)
endif()
find_package(catkin REQUIRED COMPONENTS gazebo_dev roscpp message_generation xacro wave_gazebo_plugins usv_msgs)
find_package(Eigen3 REQUIRED)
###################################
## catkin specific configuration ##
###################################
catkin_package(
INCLUDE_DIRS include
CATKIN_DEPENDS message_runtime gazebo_dev roscpp wave_gazebo_plugins
)
# Plugins require c++14
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
include_directories( include
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIRS}
)
link_directories(
${catkin_LIBRARY_DIRS}
)
## Declare a C++ library
add_library(buoyancy_gazebo_plugin
src/buoyancy_gazebo_plugin.cc
src/shape_volume.cc
src/polyhedron_volume.cc
)
target_link_libraries(buoyancy_gazebo_plugin
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS buoyancy_gazebo_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_dynamics_plugin
src/usv_gazebo_dynamics_plugin.cc
)
target_link_libraries(usv_gazebo_dynamics_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_dynamics_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_thrust_plugin
src/usv_gazebo_thrust_plugin.cc
)
target_link_libraries(usv_gazebo_thrust_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_thrust_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_wind_plugin
src/usv_gazebo_wind_plugin.cc
)
target_link_libraries(usv_gazebo_wind_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_wind_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_acoustic_pinger_plugin
src/acoustic_pinger_plugin.cc
)
add_dependencies(usv_gazebo_acoustic_pinger_plugin usv_msgs_generate_messages_cpp)
target_link_libraries(usv_gazebo_acoustic_pinger_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_acoustic_pinger_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
set(XACRO_INORDER)
if(DEFINED ENV{ROS_DISTRO})
if($ENV{ROS_DISTRO} STREQUAL "kinetic")
set(XACRO_INORDER INORDER)
endif()
endif()
# Generate demo world files from xacro and install
xacro_add_files(
worlds/buoyancy_plugin_demo.world.xacro
${XACRO_INORDER} INSTALL DESTINATION worlds
)
install(DIRECTORY worlds/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/worlds)
if(CATKIN_ENABLE_TESTING)
# buoyancy plugin test
catkin_add_gtest(buoyancy_plugin_test test/buoyancy_test.cc)
target_link_libraries(buoyancy_plugin_test buoyancy_gazebo_plugin)
endif()修改完成后,再次编译会先后出现如下的几个报错:

上述这个报错是找不到是因为在编译wave_gazebo_plugins功能包时,出现了无法找到 gazebo/gazebo.hh 和 gazebo/common/Assert.hh 头文件问题。
解决办法:
a.输入如下命令来查询 Gazebo 的安装路径。
pkg-config --cflags gazebo
pkg-config --libs gazebo
输入后会有以下输出:它包含安装路径,版本等
-
--cflags选项会显示编译时所需的头文件路径。 -
--libs选项会显示链接时所需的库路径。

或者输入如下指令直接寻找报错的未寻找到的文件:
find /usr -name gazebo.hh # 文件名根据你的报错来修改
该命令运行后的正常输入示例如下(安装了gazebo的前提下)

b. 查询结束后,按照你的查询结果修改如下两条代码,并将其加入到wave_gazebo_plugins功能包的CMakeLists.txt文件中,并保存,确保将 GAZEBO_INCLUDE_DIRS 和 GAZEBO_LIBRARY_DIRS 变量中的路径更新为你实际系统中的路径。
# 根据你所查询到的路径和版本来进行修改
set(GAZEBO_INCLUDE_DIRS "/usr/include/gazebo-9" "/usr/include/sdformat-6.3" "/usr/include/ignition/transport4" "/usr/include/ignition/msgs1" "/usr/include/ignition/math4")
set(GAZEBO_LIBRARY_DIRS "/usr/lib/x86_64-linux-gnu/gazebo-9/plugins")具体添位置见下图

c.增加如下代码,以确保包含 Gazebo 的头文件路径和有链接 Gazebo 的库文件路径
# 该条代码添加到target_include_directories(Hydrodynamics PRIVATE)中
${GAZEBO_INCLUDE_DIRS} # 确保包含 Gazebo 的 include 路径target_link_directories(Hydrodynamics
PRIVATE
${GAZEBO_LIBRARY_DIRS} # 确保链接 Gazebo 的库路径
)具体添加位置见下图

至此,关于编译 wave_gazebo_plugins功能包时,gazebo头文件无法找到的相关报错即可解决。
报错2 以下三个报错均是与找不到与OGRE库相关的头文件有关,因为Gazebo 依赖于 OGRE 进行渲染,所以你需要安装 OGRE 库及其开发文件。



解决方法:
a.输入以下命令确保你的系统已经安装了必要的 OGRE 包
sudo apt-get install libogre-1.9-dev
b. 如果你已经安装了 OGRE,但还是出现找不到头文件的问题,你需要手动指定 OGRE 的包含路径和库路径。在 CMake 文件中,可以添加如下内容:
首先输入如下命令,检查你的OGRE路径
find /usr -name OGRE

然后在 CMake 文件中,分别添加如下内容:
# 添加额外的 OGRE 包含路径,确保找到所需的头文件 根据你上面所查找的路径来改
list(APPEND OGRE_INCLUDE_DIRS "/usr/include/OGRE")
list(APPEND OGRE_INCLUDE_DIRS "/usr/include/OGRE/Paging")具体添加位置如下图所示

${OGRE_INCLUDE_DIRS} # 确保包含 OGRE 的额外路径具体添加位置如下图所示

${OGRE_INCLUDE_DIRS} # 确保包含 OGRE 的 include 路径具体添加位置如下图所示

${OGRE_LIBRARIES} # 确保链接 OGRE 库具体添加位置如下图所示

至此,关于编译 wave_gazebo_plugins功能包时与 OGRE相关的头文件找不到的报错即可解决。由于官方所给的文件版本较老,不适应当前的运行环境,所以我将所有与关于本次配置相关的修改过的CmakeList.txt文件完整版均放在文章末尾,只需按照你的路径进行相应的修改即可使用,记得每次修改后要先保存再进行编译。
保存后,在运行以下代码进行编译
cd catkin_ws/
catkin build编译成功后就会如下图所示

2 启动仿真
运行如下代码
roslaunch px4 sandisland.launch运行后会出现如下报错:

解决办法
原因是PX4_Firmware/launch文件夹中并没有sandisland.launch文件,只需将
/home/你的主机名/catkin_ws/src/vrx_gazebo/launch目录下的sandisland.launch文件复制放在PX4_Firmware/launch中即可


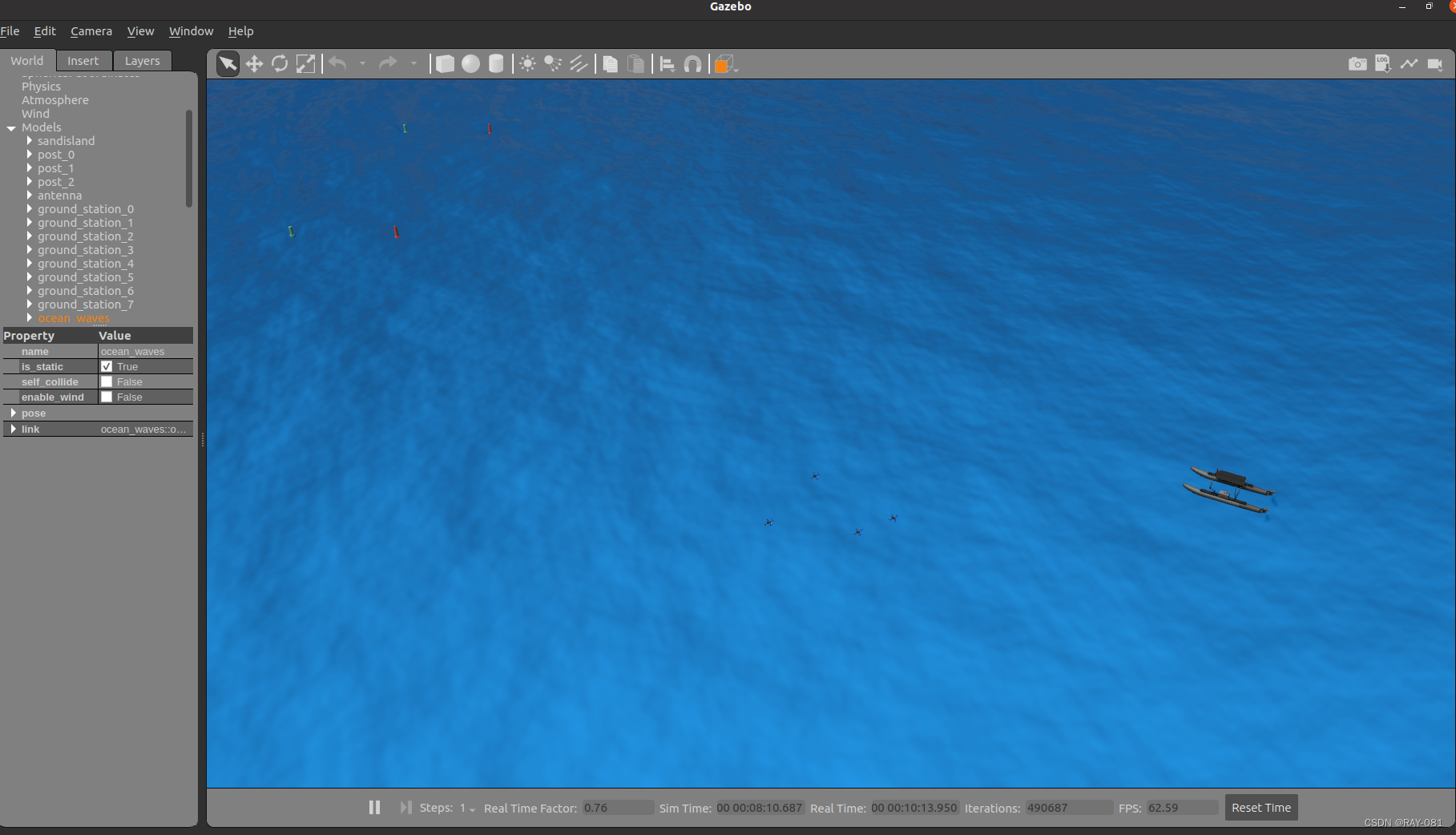
成功运行sandisland.launch文件的效果如下图所示,但是你会发现在仿真环境中并没有无人机,与官网上的视频不同。

解决办法
利用多无人机生成脚本生成多无人机启动launch文件,详细教程见:XTDrone-多机仿真-配置教程-CSDN博客
然后将启动文件中生生成多无人机部分代码加入到PX4_Firmware/launch下的sandisland.launch文件中,并修改相应的位置参数,修改后的完整sandisland.launch文件如下:(可直接复制粘贴,修改后记得保存)
<?xml version="1.0"?>
<launch>
<env name="ROSCONSOLE_CONFIG_FILE" value="$(find vrx_gazebo)/config/custom_rosconsole.conf"/>
<!-- Gazebo world to load -->
<arg name="world" default="$(find vrx_gazebo)/worlds/example_course.world" />
<!-- If true, run gazebo GUI -->
<arg name="gui" default="true" />
<!-- If true, run gazebo in verbose mode -->
<arg name="verbose" default="false"/>
<!-- If true, start in paused state -->
<arg name="paused" default="false"/>
<!-- Set various other gazebo arguments-->
<arg name="extra_gazebo_args" default=""/>
<!-- Start in a default namespace -->
<arg name="namespace" default="wamv"/>
<!-- Initial USV location and attitude-->
<arg name="x" default="158" />
<arg name="y" default="108" />
<arg name="z" default="0.1" />
<arg name="P" default="0" />
<arg name="R" default="0" />
<arg name="Y" default="-2.76" />
<!-- If true, show non-competition ROS topics (/gazebo/model_states, /vrx/debug/wind/direction, etc.)-->
<arg name="non_competition_mode" default="true"/>
<arg name="enable_ros_network" value="$(arg non_competition_mode)"/>
<env name="VRX_DEBUG" value="$(arg non_competition_mode)"/>
<env unless="$(arg non_competition_mode)" name="GAZEBO_MODEL_PATH" value="$(find vrx_gazebo)/models:$(find wamv_gazebo)/models:$(find wamv_description)/models:$(optenv GAZEBO_MODEL_PATH)"/>
<!-- Allow user specified thruster configurations
H = stern thrusters on each hull
T = H with a lateral thruster
X = "holonomic" configuration -->
<arg name="thrust_config" default="H" />
<!-- Do you want to enable sensors? -->
<arg name="camera_enabled" default="false" />
<arg name="gps_enabled" default="false" />
<arg name="imu_enabled" default="false" />
<arg name="lidar_enabled" default="false" />
<arg name="ground_truth_enabled" default="false" />
<!-- Start Gazebo with the world file -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="$(arg gui)" />
<arg name="enable_ros_network" value="$(arg enable_ros_network)"/>
<arg name="extra_gazebo_args" value="$(arg extra_gazebo_args)"/>
</include>
<!-- Load robot model -->
<arg name="urdf" default="$(find wamv_gazebo)/urdf/wamv_gazebo.urdf.xacro"/>
<param name="$(arg namespace)/robot_description"
command="$(find xacro)/xacro --inorder '$(arg urdf)'
thruster_config:=$(arg thrust_config)
camera_enabled:=$(arg camera_enabled)
gps_enabled:=$(arg gps_enabled)
imu_enabled:=$(arg imu_enabled)
lidar_enabled:=$(arg lidar_enabled)
ground_truth_enabled:=$(arg ground_truth_enabled)
namespace:=$(arg namespace)"/>
<!-- 添加无人机 -->
<!-- iris_0 -->
<group ns="iris_0">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="0"/>
<arg name="ID_in_group" value="0"/>
<arg name="fcu_url" default="udp://:24540@localhost:34580"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn_xtd.launch">
<arg name="x" value="170"/>
<arg name="y" value="120"/>
<arg name="z" value="2"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="iris"/>
<arg name="sdf" value="iris_stereo_camera"/>
<arg name="mavlink_udp_port" value="18570"/>
<arg name="mavlink_tcp_port" value="4560"/>
<arg name="udp_gimbal_port" value="13030"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="ID_in_group" value="$(arg ID_in_group)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- iris_1 -->
<group ns="iris_1">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="1"/>
<arg name="ID_in_group" value="1"/>
<arg name="fcu_url" default="udp://:24541@localhost:34581"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn_xtd.launch">
<arg name="x" value="170"/>
<arg name="y" value="116"/>
<arg name="z" value="2"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="iris"/>
<arg name="sdf" value="iris_stereo_camera"/>
<arg name="mavlink_udp_port" value="18571"/>
<arg name="mavlink_tcp_port" value="4561"/>
<arg name="udp_gimbal_port" value="13031"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="ID_in_group" value="$(arg ID_in_group)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- iris_2 -->
<group ns="iris_2">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="2"/>
<arg name="ID_in_group" value="2"/>
<arg name="fcu_url" default="udp://:24542@localhost:34582"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn_xtd.launch">
<arg name="x" value="172"/>
<arg name="y" value="120"/>
<arg name="z" value="2"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="iris"/>
<arg name="sdf" value="iris_stereo_camera"/>
<arg name="mavlink_udp_port" value="18572"/>
<arg name="mavlink_tcp_port" value="4562"/>
<arg name="udp_gimbal_port" value="13032"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="ID_in_group" value="$(arg ID_in_group)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- iris_3 -->
<group ns="iris_3">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="3"/>
<arg name="ID_in_group" value="3"/>
<arg name="fcu_url" default="udp://:24543@localhost:34583"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn_xtd.launch">
<arg name="x" value="172"/>
<arg name="y" value="116"/>
<arg name="z" value="2"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="iris"/>
<arg name="sdf" value="iris_stereo_camera"/>
<arg name="mavlink_udp_port" value="18573"/>
<arg name="mavlink_tcp_port" value="4563"/>
<arg name="udp_gimbal_port" value="13033"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="ID_in_group" value="$(arg ID_in_group)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- iris_4 -->
<group ns="iris_4">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="4"/>
<arg name="ID_in_group" value="4"/>
<arg name="fcu_url" default="udp://:24544@localhost:34584"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn_xtd.launch">
<arg name="x" value="174"/>
<arg name="y" value="120"/>
<arg name="z" value="2"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="iris"/>
<arg name="sdf" value="iris_stereo_camera"/>
<arg name="mavlink_udp_port" value="18574"/>
<arg name="mavlink_tcp_port" value="4564"/>
<arg name="udp_gimbal_port" value="13034"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="ID_in_group" value="$(arg ID_in_group)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- iris_5 -->
<group ns="iris_5">
<!-- MAVROS and vehicle configs -->
<arg name="ID" value="5"/>
<arg name="ID_in_group" value="5"/>
<arg name="fcu_url" default="udp://:24545@localhost:34585"/>
<!-- PX4 SITL and vehicle spawn -->
<include file="$(find px4)/launch/single_vehicle_spawn_xtd.launch">
<arg name="x" value="174"/>
<arg name="y" value="116"/>
<arg name="z" value="2"/>
<arg name="R" value="0"/>
<arg name="P" value="0"/>
<arg name="Y" value="0"/>
<arg name="vehicle" value="iris"/>
<arg name="sdf" value="iris_stereo_camera"/>
<arg name="mavlink_udp_port" value="18575"/>
<arg name="mavlink_tcp_port" value="4565"/>
<arg name="udp_gimbal_port" value="13035"/>
<arg name="ID" value="$(arg ID)"/>
<arg name="ID_in_group" value="$(arg ID_in_group)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="gcs_url" value=""/>
<arg name="tgt_system" value="$(eval 1 + arg('ID'))"/>
<arg name="tgt_component" value="1"/>
</include>
</group>
<!-- Spawn model in Gazebo, script depending on non_competition_mode -->
<node name="spawn_model" pkg="gazebo_ros" type="spawn_model" if="$(arg non_competition_mode)"
args="-x $(arg x) -y $(arg y) -z $(arg z)
-R $(arg R) -P $(arg P) -Y $(arg Y)
-urdf -param $(arg namespace)/robot_description -model wamv"/>
<node name="spawn_wamv" pkg="vrx_gazebo" type="spawn_wamv.bash" unless="$(arg non_competition_mode)"
args="-x $(arg x) -y $(arg y) -z $(arg z)
-R $(arg R) -P $(arg P) -Y $(arg Y)
--urdf $(arg urdf) --model wamv"/>
</launch>
然后再次运行仿真环境启动脚本,则会发现无人机与无人船都有了
roslaunch px4 sandisland.launch
至此,包含着无人机和无人船的方正环境启动完毕。
然后推出仿真环境,并关闭启动命令运行窗口。
3 为了用键盘控制无人机,需要检查PX4飞控EKF配置,原理可参考PX4飞控EKF配置 · 语雀。
首先,运行下列命令打开rcS文件
gedit ~/PX4_Firmware/build/px4_sitl_default/etc/init.d-posix/rcS
确保文件中的GPS部分做了如下修改(图中红框部分)

4 真正式启动仿真环境
启动gazebo仿真环境:
cd PX4_Firmware/
roslaunch px4 sandisland.launch 启动多无人机通信脚本:
cd ~/XTDrone/communication/
bash multi_vehicle_communication.sh启动无人机控制键盘:
cd ~/XTDrone/control/keyboard
python3 multirotor_keyboard_control.py iris 6 vel # 根据你所启动的无人机数量来修改第二个参数

无人船控制
可以通过下面的话题来控制无人船的运动:
/wamv/thrusters/left_thrust_angle
/wamv/thrusters/left_thrust_cmd
/wamv/thrusters/right_thrust_angle
/wamv/thrusters/right_thrust_cmd比如给左右推进器相同的推力:
rostopic pub -r 1 /wamv/thrusters/left_thrust_cmd std_msgs/Float32 "data: 1.0" rostopic pub -r 1 /wamv/thrusters/right_thrust_cmd std_msgs/Float32 "data: 1.0" 5 最终的运行效果展示

说明:虽然本次启动了6架无人机,都已成功建立了通信,但最后只有四架无人机起飞,不过也没关系,不影响仿真效果。
至此,所有配置均已完成,前路漫漫,任重道远,遇到问题不要着急,逐一解决即可。
6 各功能包修改后的完整版CMakeList.txt文件
6.1 usv_gazebo_plugins
cmake_minimum_required(VERSION 3.0)
project(usv_gazebo_plugins VERSION 1.0.0)
# Set policy for CMake 3.1+. Use OLD policy to let FindBoost.cmake, dependency
# of gazebo, use quoted variables in if()
if(POLICY CMP0048)
cmake_policy(SET CMP0048 NEW)
endif()
find_package(catkin REQUIRED COMPONENTS gazebo_dev roscpp message_generation xacro wave_gazebo_plugins usv_msgs)
find_package(Eigen3 REQUIRED)
###################################
## catkin specific configuration ##
###################################
catkin_package(
INCLUDE_DIRS include
CATKIN_DEPENDS message_runtime gazebo_dev roscpp wave_gazebo_plugins
)
# Plugins require c++14
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
include_directories( include
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIRS}
)
link_directories(
${catkin_LIBRARY_DIRS}
)
## Declare a C++ library
add_library(buoyancy_gazebo_plugin
src/buoyancy_gazebo_plugin.cc
src/shape_volume.cc
src/polyhedron_volume.cc
)
target_link_libraries(buoyancy_gazebo_plugin
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS buoyancy_gazebo_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_dynamics_plugin
src/usv_gazebo_dynamics_plugin.cc
)
target_link_libraries(usv_gazebo_dynamics_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_dynamics_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_thrust_plugin
src/usv_gazebo_thrust_plugin.cc
)
target_link_libraries(usv_gazebo_thrust_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_thrust_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_wind_plugin
src/usv_gazebo_wind_plugin.cc
)
target_link_libraries(usv_gazebo_wind_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_wind_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
## Declare a C++ library
add_library(usv_gazebo_acoustic_pinger_plugin
src/acoustic_pinger_plugin.cc
)
add_dependencies(usv_gazebo_acoustic_pinger_plugin usv_msgs_generate_messages_cpp)
target_link_libraries(usv_gazebo_acoustic_pinger_plugin
${catkin_LIBRARIES}
${Eigen_LIBRARIES}
)
install(TARGETS usv_gazebo_acoustic_pinger_plugin
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
set(XACRO_INORDER)
if(DEFINED ENV{ROS_DISTRO})
if($ENV{ROS_DISTRO} STREQUAL "kinetic")
set(XACRO_INORDER INORDER)
endif()
endif()
# Generate demo world files from xacro and install
xacro_add_files(
worlds/buoyancy_plugin_demo.world.xacro
${XACRO_INORDER} INSTALL DESTINATION worlds
)
install(DIRECTORY worlds/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/worlds)
if(CATKIN_ENABLE_TESTING)
# buoyancy plugin test
catkin_add_gtest(buoyancy_plugin_test test/buoyancy_test.cc)
target_link_libraries(buoyancy_plugin_test buoyancy_gazebo_plugin)
endif()
install(DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION})6.2 usv_msgs
cmake_minimum_required(VERSION 2.8.3)
project(usv_msgs)
find_package(catkin REQUIRED COMPONENTS
message_generation
message_runtime
std_msgs
)
add_message_files(
FILES
RangeBearing.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
CATKIN_DEPENDS message_generation message_runtime std_msgs
)
include_directories(
${catkin_INCLUDE_DIRS}
)6.3 vrx_gazebo
cmake_minimum_required(VERSION 2.8.3)
project(vrx_gazebo)
# We need erb to process the .world.erb files.
find_program(ERB_EXE_PATH erb)
if(NOT ERB_EXE_PATH)
message(FATAL_ERROR "Could not find the `erb` tool. Try `sudo apt-get install ruby`")
endif()
# For Qt
set(CMAKE_AUTOMOC ON)
set(CMAKE_AUTOUIC ON)
# Set policy for CMake 3.1+. Use OLD policy to let FindBoost.cmake, dependency
# of gazebo, use quoted variables in if()
if(POLICY CMP0054)
cmake_policy(SET CMP0054 NEW)
endif()
# Use OLD policy to be able to use *_generate_services_cpp before they exist,
# without error.
if(POLICY CMP0046)
cmake_policy(SET CMP0046 NEW)
endif()
find_package(Qt5Widgets REQUIRED)
find_package(Qt5Core REQUIRED)
find_package(Protobuf REQUIRED)
find_package(gazebo REQUIRED)
find_package(catkin REQUIRED COMPONENTS
gazebo_dev
geographic_msgs
message_generation
roscpp
rospy
std_msgs
wamv_gazebo
wave_gazebo
xacro
)
########################
## Message generation ##
########################
add_message_files(
FILES
Task.msg
Contact.msg
)
add_service_files(
FILES
ColorSequence.srv
)
# Python scripts setup
catkin_python_setup()
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
INCLUDE_DIRS include
CATKIN_DEPENDS wamv_gazebo wave_gazebo xacro gazebo_dev geographic_msgs std_msgs message_runtime
LIBRARIES scoring_plugin
)
set(CMAKE_CXX_FLAGS "-std=c++11 ${CMAKE_CXX_FLAGS} ${GAZEBO_CXX_FLAGS}")
include_directories(include ${catkin_INCLUDE_DIRS}
${Qt5Core_INCLUDE_DIRS}
${QT_USE_FILE}
${GAZEBO_INCLUDE_DIRS}
${CMAKE_CURRENT_BINARY_DIR}/msgs
)
link_directories(${GAZEBO_LIBRARY_DIRS} ${CMAKE_CURRENT_BINARY_DIR}/msgs)
add_subdirectory(msgs)
add_definitions(${QT_DEFINITIONS})
# Library for displaying waypoint markers
add_library(waypoint_markers src/waypoint_markers.cc)
target_link_libraries(waypoint_markers ${catkin_LIBRARIES})
add_dependencies(waypoint_markers ${catkin_EXPORTED_TARGETS})
install(TARGETS waypoint_markers
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Plugin for setting color of light buoy.
add_library(light_buoy_plugin src/light_buoy_plugin.cc)
target_link_libraries(light_buoy_plugin
${catkin_LIBRARIES}
light_buoy_colors_msgs
)
add_dependencies(light_buoy_plugin ${catkin_EXPORTED_TARGETS}
light_buoy_colors_msgs
)
install(TARGETS light_buoy_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Plugin for setting color and shape of a placard.
add_library(placard_plugin src/placard_plugin.cc)
target_link_libraries(placard_plugin
${catkin_LIBRARIES}
dock_placard_msgs
)
add_dependencies(placard_plugin
${catkin_EXPORTED_TARGETS}
dock_placard_msgs
)
install(TARGETS placard_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# A generic scoring plugin.
add_library(scoring_plugin src/scoring_plugin.cc)
target_link_libraries(scoring_plugin
${catkin_LIBRARIES}
)
add_dependencies(scoring_plugin
${catkin_EXPORTED_TARGETS}
vrx_gazebo_generate_messages_cpp
vrx_gazebo_generate_services_cpp
)
install(TARGETS scoring_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Plugin for scoring the navigation challenge task.
add_library(navigation_scoring_plugin src/navigation_scoring_plugin.cc)
target_link_libraries(navigation_scoring_plugin
${catkin_LIBRARIES}
scoring_plugin)
add_dependencies(navigation_scoring_plugin ${catkin_EXPORTED_TARGETS})
install(TARGETS navigation_scoring_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Plugin for scoring the station keeping challenge task.
add_library(stationkeeping_scoring_plugin src/stationkeeping_scoring_plugin.cc)
target_link_libraries(stationkeeping_scoring_plugin
${catkin_LIBRARIES}
scoring_plugin
waypoint_markers)
add_dependencies(stationkeeping_scoring_plugin ${catkin_EXPORTED_TARGETS})
install(TARGETS stationkeeping_scoring_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Plugin for scoring the waypoint navigation challenge task.
add_library(wayfinding_scoring_plugin src/wayfinding_scoring_plugin.cc)
target_link_libraries(wayfinding_scoring_plugin
${catkin_LIBRARIES}
scoring_plugin
waypoint_markers)
add_dependencies(wayfinding_scoring_plugin ${catkin_EXPORTED_TARGETS})
install(TARGETS wayfinding_scoring_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Plugin for scoring the scan and dock task.
add_library(scan_dock_scoring_plugin src/scan_dock_scoring_plugin.cc)
target_link_libraries(scan_dock_scoring_plugin
${catkin_LIBRARIES}
scoring_plugin
light_buoy_colors_msgs
dock_placard_msgs
)
add_dependencies(scan_dock_scoring_plugin
${catkin_EXPORTED_TARGETS}
light_buoy_colors_msgs
dock_placard_msgs
)
install(TARGETS scan_dock_scoring_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
if(${GAZEBO_MAJOR_VERSION} GREATER 7)
# Plugin for Task Info GUI Overlay
add_library(gui_task_widget SHARED ${headers_MOC}
src/gui_task_widget.cc
)
target_link_libraries(gui_task_widget
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${PROTOBUF_LIBRARIES}
${QT_LIBRARIES}
)
qt5_use_modules(gui_task_widget Widgets)
add_dependencies(gui_task_widget ${catkin_EXPORTED_TARGETS})
install(TARGETS gui_task_widget
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
endif()
# Plugin for scoring the perception task.
add_library(perception_scoring_plugin src/perception_scoring_plugin.cc)
target_link_libraries(perception_scoring_plugin
${catkin_LIBRARIES}
scoring_plugin)
add_dependencies(perception_scoring_plugin ${catkin_EXPORTED_TARGETS})
install(TARGETS perception_scoring_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
# Dock base files that need to be processed with erb
set(dock_base_erb_files
models/dock_2016_base/model.sdf.erb
models/dock_2018_base/model.sdf.erb
models/dock_2016_base_dynamic/model.sdf.erb
models/dock_2018_base_dynamic/model.sdf.erb
)
# Dock files that need to be processed with erb
set(dock_erb_files
models/dock_2016/model.sdf.erb
models/dock_2018/model.sdf.erb
models/dock_2016_dynamic/model.sdf.erb
models/dock_2018_dynamic/model.sdf.erb
)
# Process the dock base erb files
foreach(_erb ${dock_base_erb_files})
string(REGEX REPLACE ".sdf.erb" ".sdf" _model ${_erb})
set(_model ${CMAKE_CURRENT_SOURCE_DIR}/${_model})
add_custom_command(OUTPUT ${_model}
COMMAND ${ERB_EXE_PATH} ${_erb} > ${_model}
DEPENDS
${CMAKE_CURRENT_SOURCE_DIR}/${_erb}
${CMAKE_CURRENT_SOURCE_DIR}/dock_generator.erb
WORKING_DIRECTORY ${CMAKE_CURRENT_SOURCE_DIR})
list(APPEND dock_base_files ${_model})
endforeach()
add_custom_target(dock_base_erb_generation ALL DEPENDS ${dock_base_files})
# Process the dock erb files
foreach(_erb ${dock_erb_files})
string(REGEX REPLACE ".sdf.erb" ".sdf" _model ${_erb})
set(_model ${CMAKE_CURRENT_SOURCE_DIR}/${_model})
add_custom_command(OUTPUT ${_model}
COMMAND ${ERB_EXE_PATH} ${_erb} > ${_model}
DEPENDS
${CMAKE_CURRENT_SOURCE_DIR}/${_erb}
${CMAKE_CURRENT_SOURCE_DIR}/dock_generator.erb
WORKING_DIRECTORY ${CMAKE_CURRENT_SOURCE_DIR})
list(APPEND dock_files ${_model})
endforeach()
add_custom_target(dock_erb_generation ALL
DEPENDS
${dock_files}
dock_base_erb_generation
)
set(XACRO_INORDER)
if(DEFINED ENV{ROS_DISTRO})
if($ENV{ROS_DISTRO} STREQUAL "kinetic")
set(XACRO_INORDER INORDER)
endif()
endif()
# Generate world files from xacro and install
xacro_add_files(
worlds/example_course.world.xacro
worlds/navigation_task.world.xacro
worlds/perception_task.world.xacro
worlds/sandisland.world.xacro
worlds/dock.world.xacro
worlds/scan_and_dock.world.xacro
worlds/stationkeeping_task.world.xacro
worlds/wayfinding_task.world.xacro
worlds/wind_test.world.xacro
worlds/ocean.world.xacro
${XACRO_INORDER} INSTALL DESTINATION worlds
)
# Generate obstacle course
add_custom_command(
OUTPUT ${CMAKE_CURRENT_SOURCE_DIR}/models/robotx_2018_qualifying_avoid_obstacles_buoys/model.sdf
DEPENDS ${CMAKE_CURRENT_SOURCE_DIR}/scripts/generate_avoid_obstacles_buoys
COMMAND ${CMAKE_CURRENT_SOURCE_DIR}/scripts/generate_avoid_obstacles_buoys --seed 1337 --a3 6 --a5 7 --a7 7 > ${CMAKE_CURRENT_SOURCE_DIR}/models/robotx_2018_qualifying_avoid_obstacles_buoys/model.sdf
)
add_custom_target(${PROJECT_NAME}_generate_obstacle_course_buoys ALL DEPENDS ${CMAKE_CURRENT_SOURCE_DIR}/models/robotx_2018_qualifying_avoid_obstacles_buoys/model.sdf)
# Install all the config files
install(DIRECTORY config/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/config)
# Install all the world files
install(DIRECTORY worlds/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/worlds)
# Install all the model files
install(DIRECTORY models/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/models)
# Install all the launch files
install(DIRECTORY launch/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/launch)
install(DIRECTORY include/
DESTINATION ${CATKIN_GLOBAL_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.hh"
)
install(PROGRAMS scripts/spawn_wamv.bash
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
if(CATKIN_ENABLE_TESTING)
find_package(rostest REQUIRED)
add_rostest_gtest(sandisland_test
test/sandisland.test
test/sandisland.cc)
target_link_libraries(sandisland_test ${catkin_LIBRARIES})
endif()
# Python Scripts
catkin_install_python(PROGRAMS
nodes/twist2thrust.py
nodes/key2thrust_angle.py
scripts/generate_worlds
scripts/generate_wamv
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})6.4 wamv_description
cmake_minimum_required(VERSION 2.8.3)
project(wamv_description)
find_package(catkin REQUIRED COMPONENTS xacro)
catkin_package(CATKIN_DEPENDS xacro)
set(XACRO_INORDER)
if(DEFINED ENV{ROS_DISTRO})
if($ENV{ROS_DISTRO} STREQUAL "kinetic")
set(XACRO_INORDER INORDER)
endif()
endif()
xacro_add_files(
urdf/wamv_base.urdf.xacro
${XACRO_INORDER} INSTALL DESTINATION urdf
)
install(DIRECTORY models/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/models)
install(DIRECTORY urdf/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/urdf)6.5 wamv_gazebo
cmake_minimum_required(VERSION 2.8.3)
project(wamv_gazebo)
# Set policy for CMake 3.1+. Use OLD policy to let FindBoost.cmake, dependency
# of gazebo, use quoted variables in if()
if(POLICY CMP0054)
cmake_policy(SET CMP0054 NEW)
endif()
find_package(catkin REQUIRED COMPONENTS
wamv_description
usv_gazebo_plugins
xacro
)
catkin_package(
CATKIN_DEPENDS wamv_description usv_gazebo_plugins xacro
)
set(XACRO_INORDER)
if(DEFINED ENV{ROS_DISTRO})
if($ENV{ROS_DISTRO} STREQUAL "noetic")
set(XACRO_INORDER INORDER)
endif()
endif()
# Generate urdf files from xacro and install
xacro_add_files(
urdf/wamv_gazebo.urdf.xacro
${XACRO_INORDER} INSTALL DESTINATION urdf
)
# Install meshes and textures
install(DIRECTORY models/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/models)
# Install xacro files / macros
install(DIRECTORY urdf/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/urdf)
# Install config files
install(DIRECTORY config/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/config)
# Install launch files
install(DIRECTORY launch/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/launch)6.6 wave_gazebo
cmake_minimum_required(VERSION 2.8.3)
project(wave_gazebo)
# We need erb to process the model erb files.
find_program(ERB_EXE_PATH erb)
if(NOT ERB_EXE_PATH)
message(FATAL_ERROR "Could not find the `erb` tool. Try `sudo apt-get install ruby`")
endif()
find_package(catkin REQUIRED COMPONENTS
xacro
)
catkin_package(
CATKIN_DEPENDS xacro
)
# Model files to be processed with erb
set (xacro_erb_files
world_models/ocean_waves/model.xacro.erb
)
# Process the xacro erb files
foreach(_erb ${xacro_erb_files})
string(REGEX REPLACE ".xacro.erb" ".xacro" _model ${_erb})
set(_model ${CMAKE_CURRENT_SOURCE_DIR}/${_model})
add_custom_command(OUTPUT ${_model}
COMMAND ${ERB_EXE_PATH} ${_erb} > ${_model}
DEPENDS
${CMAKE_CURRENT_SOURCE_DIR}/${_erb}
WORKING_DIRECTORY ${CMAKE_CURRENT_SOURCE_DIR})
list(APPEND model_files ${_model})
endforeach()
install(DIRECTORY world_models/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/world_models)
add_custom_target(model_erb_generation ALL
DEPENDS
${model_files}
)
set(XACRO_INORDER)
if(DEFINED ENV{ROS_DISTRO})
if($ENV{ROS_DISTRO} STREQUAL "noetic")
set(XACRO_INORDER INORDER)
endif()
endif()
# Generate world files from xacro and install
xacro_add_files(
worlds/ocean.world.xacro
worlds/ocean_buoys.world.xacro
worlds/ocean_wamv.world.xacro
${XACRO_INORDER} INSTALL DESTINATION worlds
)6.7 wave_gazebo_plugins
cmake_minimum_required(VERSION 3.0)
project(wave_gazebo_plugins VERSION 1.0.0)
###############################################################################
# Compile as C++14, supported in ROS Noetic and newer
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# Set policy for CMake 3.1+. Use NEW policy to manage version variables
if(POLICY CMP0048)
cmake_policy(SET CMP0048 NEW)
endif()
###############################################################################
# Other dependencies...
find_package(catkin REQUIRED COMPONENTS gazebo_ros)
find_package(gazebo REQUIRED)
find_package(Eigen3 REQUIRED)
# Find OGRE and include its components (e.g., Paging)
find_package(OGRE 1.9 REQUIRED COMPONENTS Paging)
# 手动设置 Gazebo 路径
set(GAZEBO_INCLUDE_DIRS "/usr/include/gazebo-9" "/usr/include/sdformat-6.3" "/usr/include/ignition/transport4" "/usr/include/ignition/msgs1" "/usr/include/ignition/math4")
set(GAZEBO_LIBRARY_DIRS "/usr/lib/x86_64-linux-gnu/gazebo-9/plugins")
# 添加额外的 OGRE 包含路径,确保找到所需的头文件
list(APPEND OGRE_INCLUDE_DIRS "/usr/include/OGRE")
list(APPEND OGRE_INCLUDE_DIRS "/usr/include/OGRE/Paging")
# # 查找 OGRE 头文件目录
# set(OGRE_ROOT "/usr/include/OGRE")
# # 递归地获取 OGRE 目录下所有子目录
# file(GLOB_RECURSE OGRE_SUBDIRS RELATIVE ${OGRE_ROOT} ${OGRE_ROOT}/*)
# # 初始化包含目录变量
# set(OGRE_INCLUDE_DIRS ${OGRE_ROOT})
# # 将 OGRE 子目录添加到包含目录中
# foreach(SUBDIR ${OGRE_SUBDIRS})
# if(IS_DIRECTORY "${OGRE_ROOT}/${SUBDIR}")
# list(APPEND OGRE_INCLUDE_DIRS "${OGRE_ROOT}/${SUBDIR}")
# endif()
# endforeach()
# # 输出包含目录(可选,供调试用)
# # message(STATUS "OGRE include directories: ${OGRE_INCLUDE_DIRS}")
# # 添加到包含目录中
# include_directories(${OGRE_INCLUDE_DIRS})
###############################################################################
# Catkin...
catkin_package(
INCLUDE_DIRS include
LIBRARIES
Hydrodynamics
WavefieldModelPlugin
WavefieldVisualPlugin
wavegauge_plugin
DEPENDS
gazebo_ros
)
###############################################################################
# Libraries...
# Hydrodynamics
add_library(Hydrodynamics
SHARED
src/Gazebo.cc
src/Geometry.cc
src/PhysicalConstants.cc
src/Physics.cc
src/Utilities.cc
src/Wavefield.cc
src/WavefieldEntity.cc
)
target_include_directories(Hydrodynamics
PRIVATE
${PROJECT_SOURCE_DIR}/include
${Boost_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
${GAZEBO_INCLUDE_DIRS} # 确保包含 Gazebo 的 include 路径
${OGRE_INCLUDE_DIRS} # 确保包含 OGRE 的额外路径
)
target_link_directories(Hydrodynamics
PRIVATE
${GAZEBO_LIBRARY_DIRS} # 确保链接 Gazebo 的库路径
)
target_link_libraries(Hydrodynamics
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
)
target_compile_features(Hydrodynamics PRIVATE cxx_std_14)
target_compile_options(Hydrodynamics PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_LIBRARIES_LIST Hydrodynamics)
###############################################################################
# Plugins...
# WavefieldModelPlugin
add_library(WavefieldModelPlugin
SHARED
src/WavefieldModelPlugin.cc
)
target_include_directories(WavefieldModelPlugin
PRIVATE
${PROJECT_SOURCE_DIR}/include
${Boost_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${GAZEBO_INCLUDE_DIRS}
${OGRE_INCLUDE_DIRS}
)
target_link_directories(WavefieldModelPlugin
PRIVATE
${GAZEBO_LIBRARY_DIRS}
)
target_link_libraries(WavefieldModelPlugin
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${WAVE_GAZEBO_LIBRARIES_LIST}
)
target_compile_features(WavefieldModelPlugin PRIVATE cxx_std_14)
target_compile_options(WavefieldModelPlugin PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_PLUGINS_LIST WavefieldModelPlugin)
# WavefieldVisualPlugin
add_library(WavefieldVisualPlugin
SHARED
src/WavefieldVisualPlugin.cc
)
target_include_directories(WavefieldVisualPlugin
PRIVATE
${PROJECT_SOURCE_DIR}/include
${Boost_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${GAZEBO_INCLUDE_DIRS}
${OGRE_INCLUDE_DIRS} # 确保包含 OGRE 的 include 路径
)
target_link_directories(WavefieldVisualPlugin
PRIVATE
${GAZEBO_LIBRARY_DIRS}
)
target_link_libraries(WavefieldVisualPlugin
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${WAVE_GAZEBO_LIBRARIES_LIST}
${OGRE_LIBRARIES} # 确保链接 OGRE 库
)
target_compile_features(WavefieldVisualPlugin PRIVATE cxx_std_14)
target_compile_options(WavefieldVisualPlugin PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_PLUGINS_LIST WavefieldVisualPlugin)
# WavegaugePlugin
add_library(wavegauge_plugin
SHARED
src/wavegauge_plugin.cc
)
target_include_directories(wavegauge_plugin
PRIVATE
${PROJECT_SOURCE_DIR}/include
${Boost_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${GAZEBO_INCLUDE_DIRS}
)
target_link_directories(wavegauge_plugin
PRIVATE
${GAZEBO_LIBRARY_DIRS}
)
target_link_libraries(wavegauge_plugin
WavefieldModelPlugin
${Boost_LIBRARIES}
${catkin_LIBRARIES}
${GAZEBO_LIBRARIES}
${WAVE_GAZEBO_LIBRARIES_LIST}
)
add_dependencies(wavegauge_plugin WavefieldModelPlugin)
target_compile_features(wavegauge_plugin PRIVATE cxx_std_14)
target_compile_options(wavegauge_plugin PRIVATE "-Wno-unknown-pragmas")
list(APPEND WAVE_GAZEBO_PLUGINS_LIST wavegauge_plugin)
###############################################################################
# Executables...
###############################################################################
# Tests...
if(CATKIN_ENABLE_TESTING)
catkin_add_gtest(UNIT_Wavefield_TEST src/Wavefield_TEST.cc)
target_include_directories(UNIT_Wavefield_TEST
PRIVATE
${PROJECT_SOURCE_DIR}/include
${Boost_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
${GAZEBO_INCLUDE_DIRS}
)
target_link_directories(UNIT_Wavefield_TEST
PRIVATE
${GAZEBO_LIBRARY_DIRS}
)
target_link_libraries(UNIT_Wavefield_TEST ${WAVE_GAZEBO_LIBRARIES_LIST})
target_compile_features(UNIT_Wavefield_TEST PRIVATE cxx_std_14)
target_compile_options(UNIT_Wavefield_TEST PRIVATE "-Wno-unknown-pragmas")
endif()
###############################################################################
# Install
install(
TARGETS
${WAVE_GAZEBO_LIBRARIES_LIST}
${WAVE_GAZEBO_PLUGINS_LIST}
wavegauge_plugin
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
install(
DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.hh"
)
install(
DIRECTORY ${CMAKE_CURRENT_BINARY_DIR}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.pb.*"
)说明:在复制后,对应修改你的路径即可。另外,针对与此配置,可能有些功能包没有用到,所以有个别的CMakeList.txt就没有改到,如果编译时还出现其他报错的话,可以参照前面改错的方法去修改。
参考:无人机与无人船协同初步 · 语雀
感谢GPT!