步进电机加减速使用的场景有那些呢?为什么要使用加减速呢?
- 硬件驱动细分器与软件的细分参数或定时器分频参数设置不当时启动电机时,会遇见步进电机有啸叫声但是不会转动,这是因为软件产生脉冲的频率大于步进电机的启动频率,步进电机有一个很重要的技术参数:空载启动频率,也就是在没有负载的情况下能够正常启动的最大脉冲频率,如果脉冲频率大于该值,步进电机则不能够正常启动,发生丢步或者堵转的情况。
- 或者也可以理解为由于步进脉冲变化过快,转子由于惯性的作用跟不上电信号的变化。所以要使用加减速来解决启动频率低的问题,在启动时使用较低的脉冲频率,然后逐渐的加快频率。步进电机在开环控制的时候也需要有高精度,无积累误差等优点,被广泛应用于数控系统中,但是我们要实现步进电机的快速准确的定位,就要防止失步和过冲的现象发生,并以最快的速度到达指定的位置。
梯形加减速的介绍
为了使得不出现丢步或者超步现象并且提高效率,需要使得步进电机先以固定的加速度达到目标速度,然后以这个速度运行,快到达目标步数时再减到最低速;整个过程是一个梯形的模型。
步进电机因其无需反馈就能对位置和速度进行控制而在工业自动化设备中的应用极为广泛。例如这个装置使用步进电机实现物体 X 的移动,系统要求从 A 点出发,到 B点停止,移动的时间越短越好且系统稳定。

- 步进电机的特性,最大程度加大电机转速(提高脉冲频率),则到达 B 点的时间就越短,但是如果施加脉冲频率太高,超过了步进电机的最小启动频率,则会造成电机内部的反向电动势的阻尼作用,转子与定子之间的磁反应将跟随不上电信号的变化,导致堵转或者丢步,滑块连动都没动。
- 所以要求在电机启动时需要一个低速,但为了实现系统要求,在启动之后慢慢的升高速度,实现一个加速的过程,那如果在达到终点前一直在加速,就又有另外一个问题,到达终点时速度太快就会导致刹不住,出现过冲现象,为了防止这个现象我们需要在达到终点前的一段距离提前减速,使得滑块到达终点时速度刚好为 0,即从最高速度一直减至停止。如果在加速的过程中,从启动速度到目标速度的加减速是以一定的比例进行加速/减速。
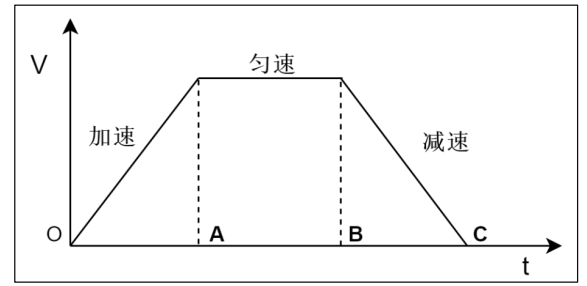
整个运动过程将滑块的速度变化一共分为三个阶段,OA 段其实就是滑块的加速部分、AB 则是匀速部分,BC 则是减速部分。因其图像呈现梯形,所以我们把这
种运动变化称之为梯形加减速。这种算法是一种在加速过程和减速过程中加速度不变的匀变速控制算法。
OA加速过程中,由低于步进电机的启动频率开始启动(模型中由 0 启动),以固定的加速度增加速度到目标值AB匀速过程中,以最大速度匀速运动BC减速部分中,以加速度不变的速度递减到 0
这种算法是一种在加速过程和减速过程中加速度不变的匀变速控制算法,由于速度变化的曲线有折点,所以在启动、停止、匀速段中很容易产生冲击和振动。
点击 14 学习PID--步进电机梯形加减速实现原理——古月居kechakanqu