目录
一、前言
二、项目简介
1.功能详解
2.主要器件
三、原理图设计
四、PCB硬件设计
1.PCB图
2.PCB板打样焊接图
五、程序设计
六、实验效果
七、资料内容
项目分享
一、前言
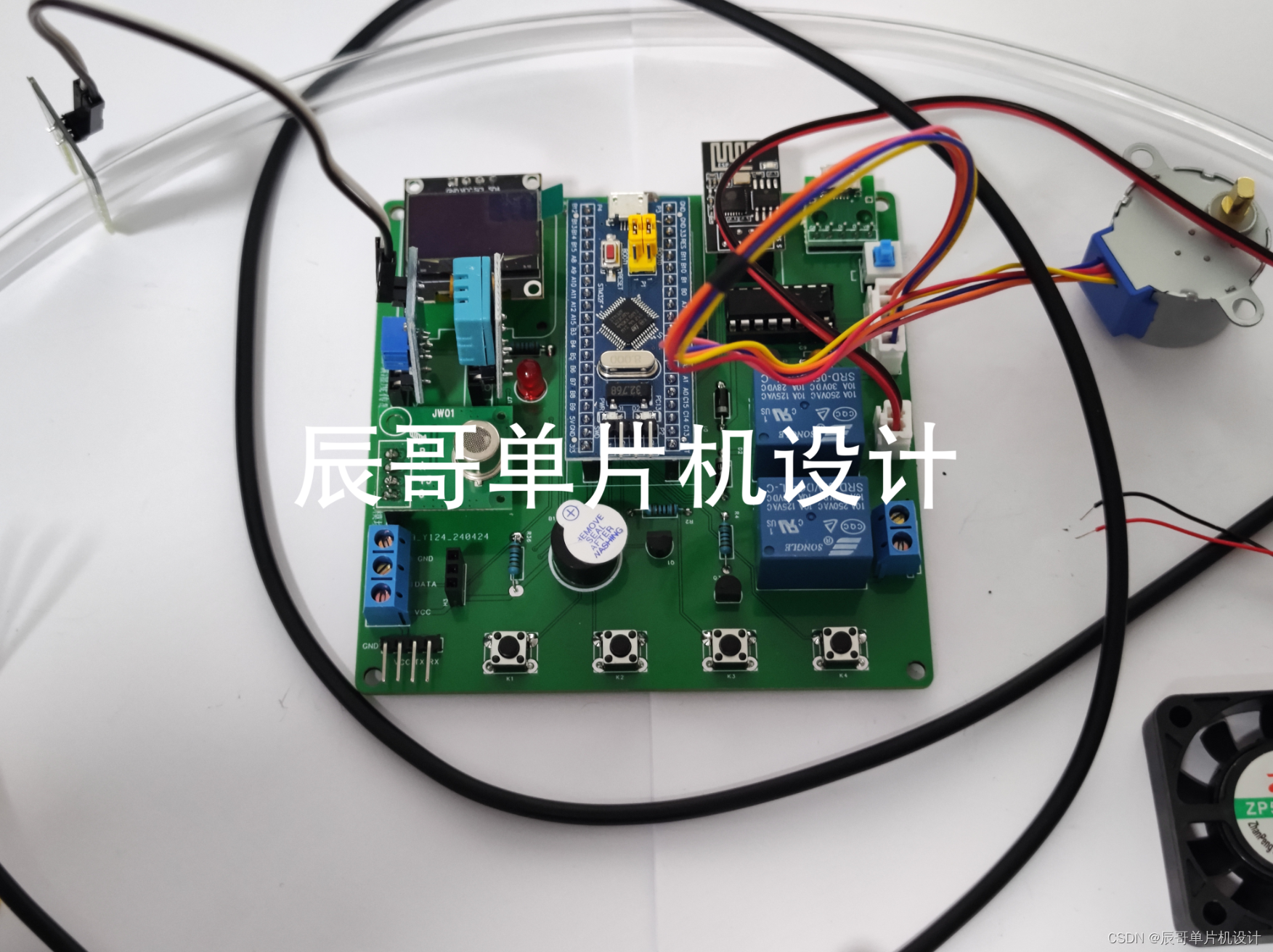
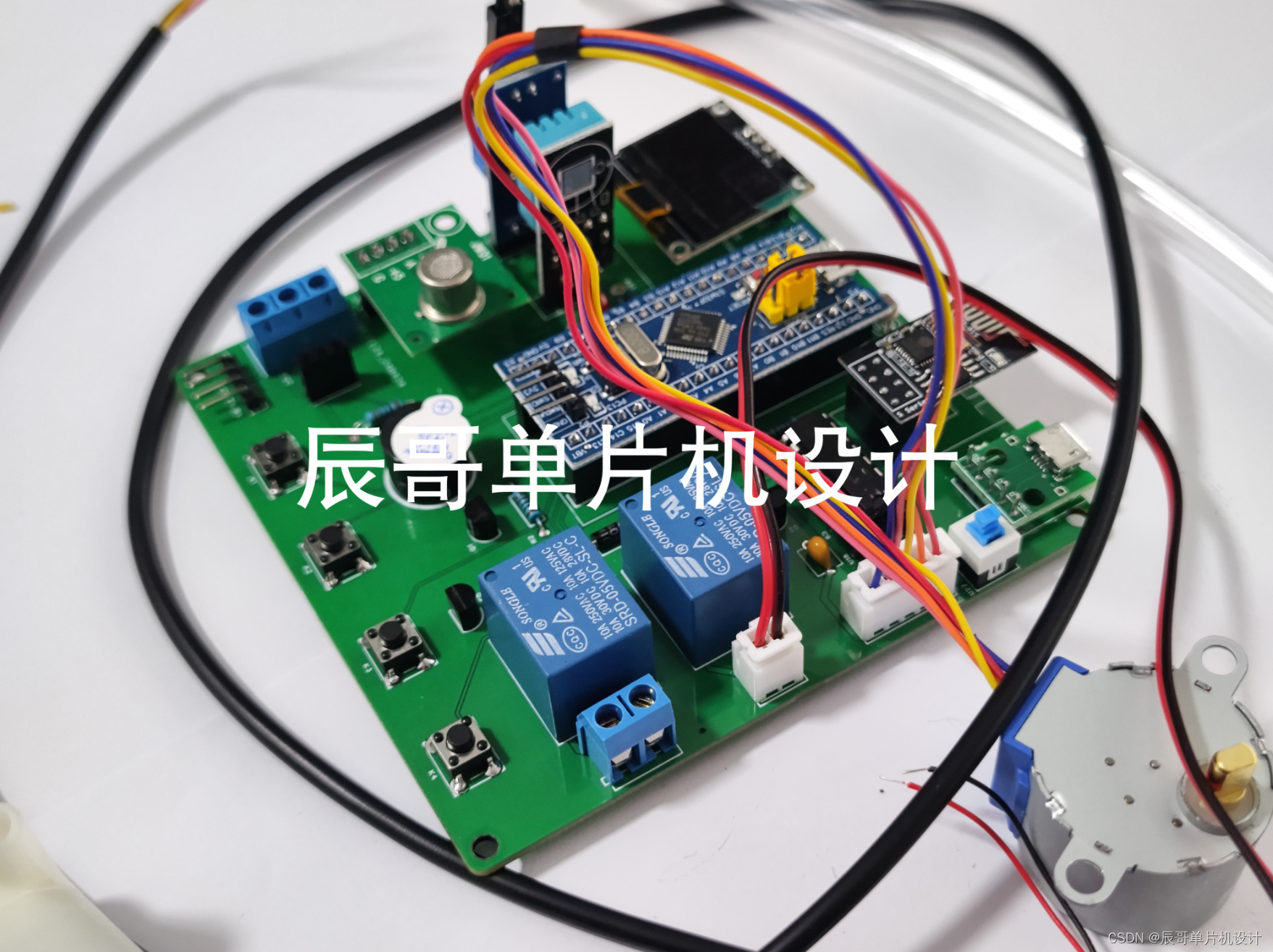
项目成品图片:
哔哩哔哩视频链接:
https://www.bilibili.com/video/BV1Rw4m117jv/?share_source=copy_web&vd_source=097fdeaf6b6ecfed8a9ff7119c32faf2
(资料分享见文末)
二、项目简介
1.功能详解
STM32基于机智云的智能温室大棚系统。功能如下:
- 温湿度采集:使用DHT11温湿度传感器采集环境温湿度
- 土壤湿度采集:通过土壤湿度模块采集土壤湿度
- 光照强度采集:通过光敏电阻采集环境光照强度
- 二氧化碳浓度采集:通过CO2气敏传感器检测二氧化碳浓度
- 土壤温度采集:通过DS18B20传感器采集土壤温度
- 风扇控制:可自动模式下根据环境温度触发或手动模式下APP开闭
- 水泵控制:可自动模式下根据土壤湿度触发或手动模式下APP开闭
- LED照明灯控制:可自动模式下根据环境光强触发或手动模式下按键开闭
- 通风口:通过步进电机模拟通风口
- OLED显示:将检测到的环境数据显示在oled屏幕上。
- 蜂鸣器报警:危险情况下本地蜂鸣器触发报警
- APP功能:使用机智云APP,包括功能有控制并显示风扇、水泵、通风口和补光灯状态,选择工作模式为手动或自动模式,显示当前环境温湿度、土壤温湿度以及光照强度和二氧化碳浓度信息
2.主要器件
- STM32F103C8T6最小系统板
- DHT11温湿度传感器
- OLED显示屏(4针I2C协议)
- WiFi模块(ESP8266-01s)
- 土壤湿度传感器
- 二氧化碳传感器
- DS18B20温度传感器
- 28BYJ51步进电机
- 5V风扇模块
- 5V水泵模块
- 蜂鸣器
- LED灯
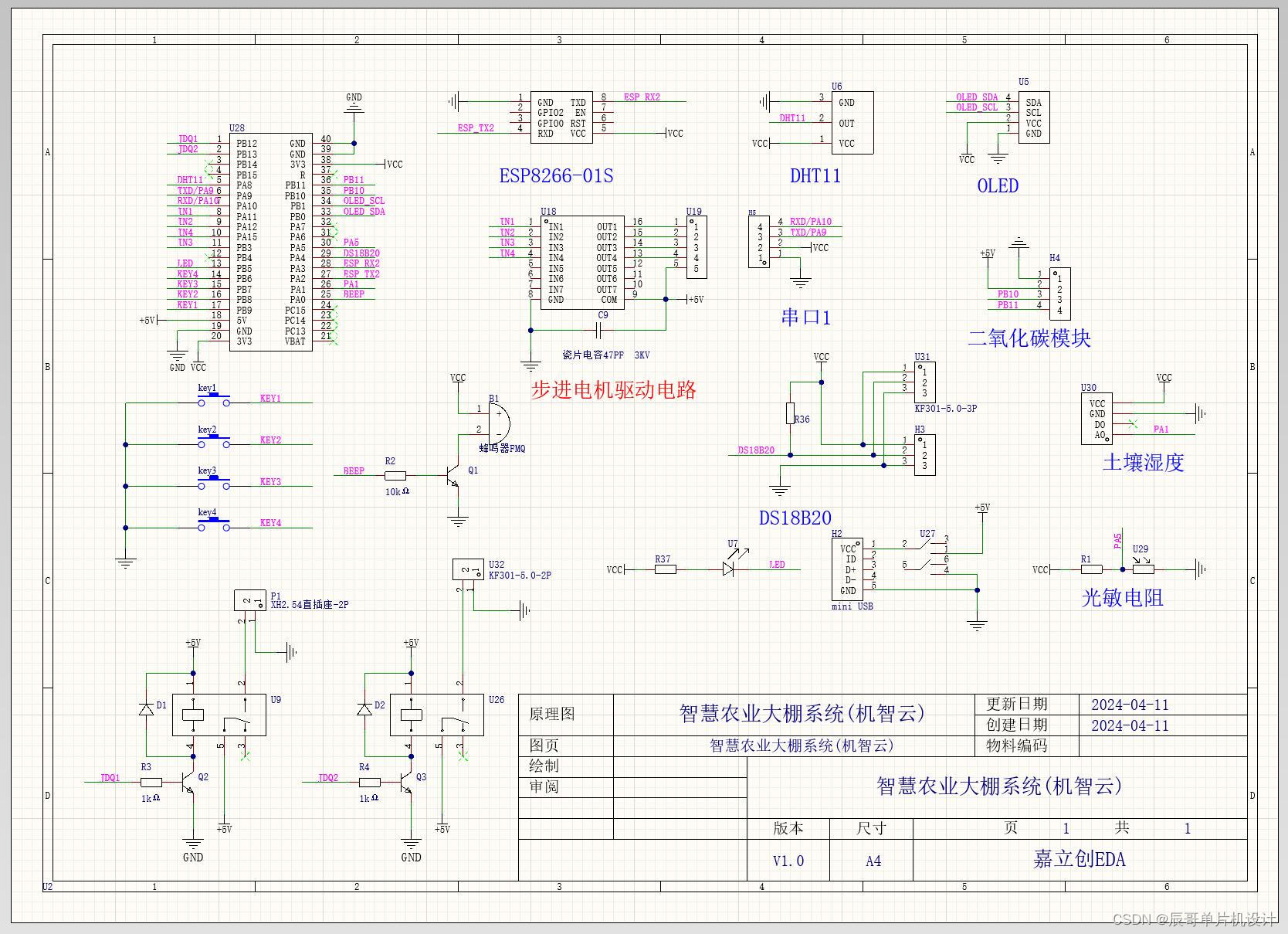
三、原理图设计
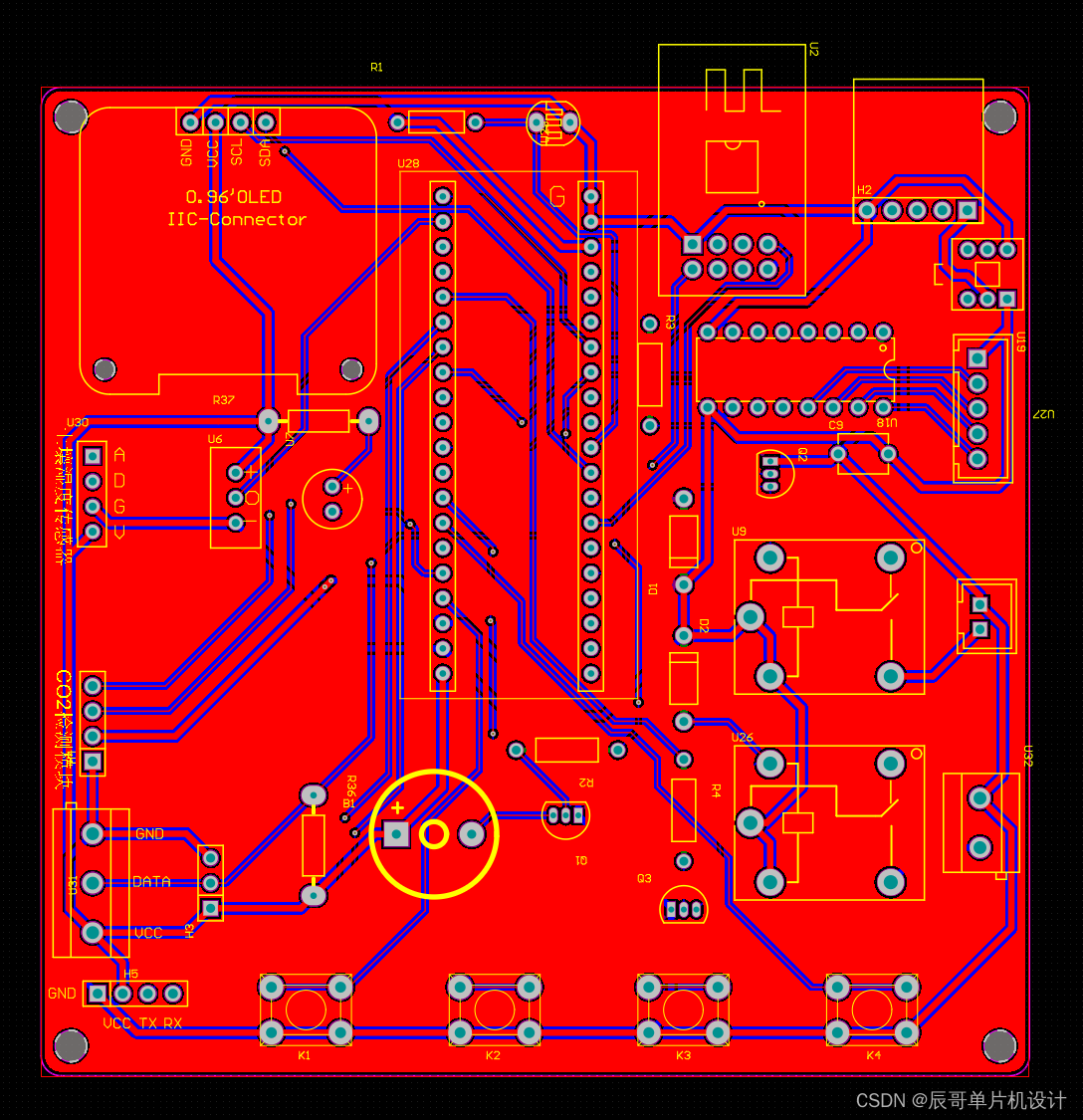
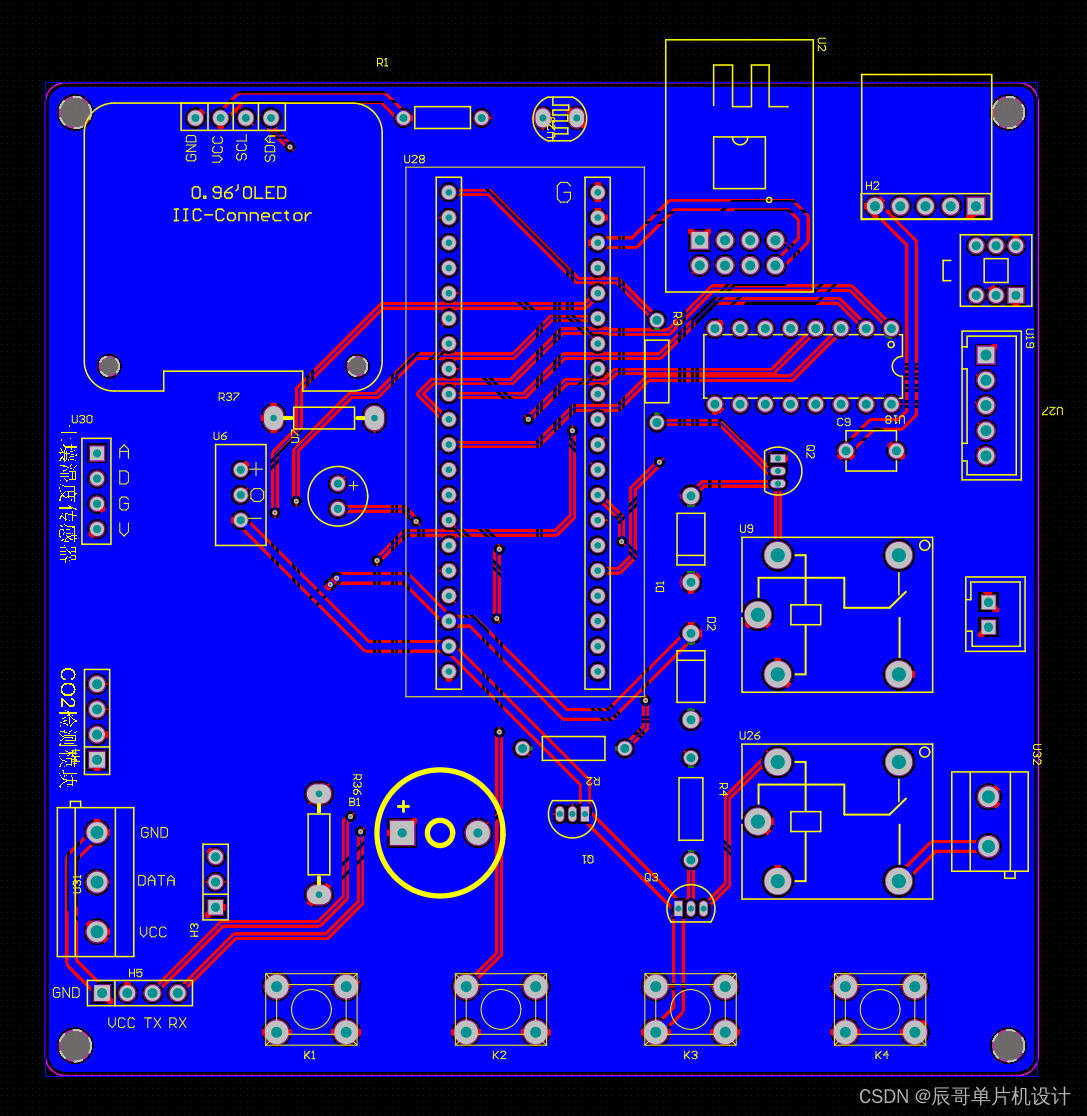
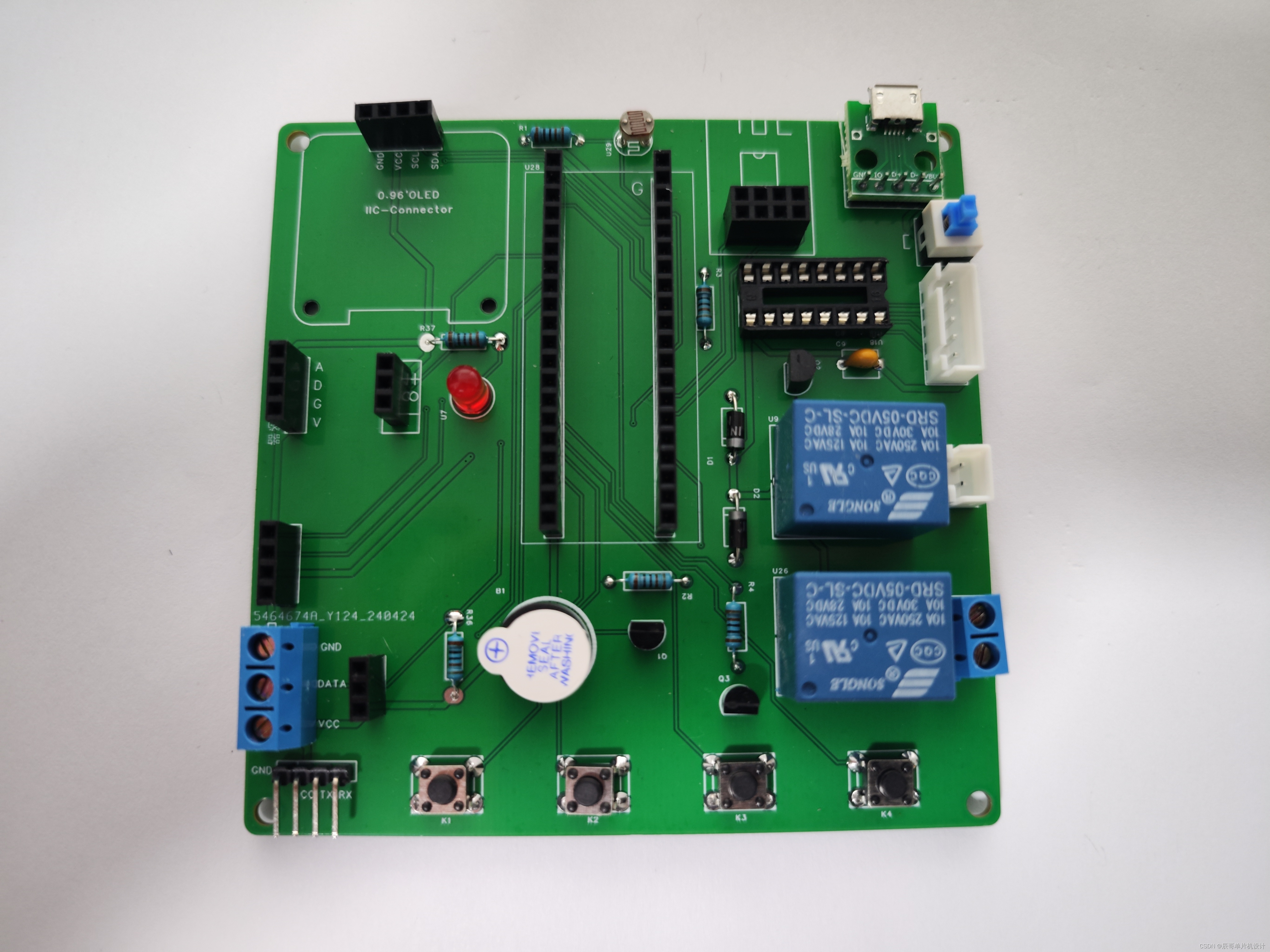
四、PCB硬件设计
1.PCB图
2.PCB板打样焊接图
五、程序设计
int main(void)
{
ADCX_Init();
Timer2_Init(9,14398);
Uart2_Init(9600);
Uart1_Init(115200);
Uart3_Init();
IWDG_Init(); //初始化看门狗
LDR_Init();
YL69_Init();
OLED_Init();
DHT11_Init();
LED_Init();
Buzzer_Init();
Relay_Init();
MOTOR_Init();
Key_Init();
Sensorthreshold.CO2Value = FLASH_R(FLASH_START_ADDR); //从指定页的地址读FLASH
Sensorthreshold.luxValue = FLASH_R(FLASH_START_ADDR+2); //从指定页的地址读FLASH
Sensorthreshold.tempValue = FLASH_R(FLASH_START_ADDR+4); //从指定页的地址读FLASH
Sensorthreshold.humiValue = FLASH_R(FLASH_START_ADDR+6); //从指定页的地址读FLASH
Sensorthreshold.soilTempValue = FLASH_R(FLASH_START_ADDR+8); //从指定页的地址读FLASH
Sensorthreshold.soilHumiValue = FLASH_R(FLASH_START_ADDR+10); //从指定页的地址读FLASH
GENERAL_TIM_Init();
userInit(); //完成机智云初始赋值
gizwitsInit(); //开辟一个环形缓冲区
while (1)
{
IWDG_ReloadCounter(); //重新加载计数值 喂狗
SensorScan(); //获取传感器数据
switch (menu)
{
case display_page1:
SensorDataDisplay1(); //显示传感器1数据
OLED_Menu1(); //显示主页面1固定信息
if (KeyNum == KEY_2) //是否按下按键2
{
KeyNum = 0;
OLED_Clear(); //清屏
menu = display_page2; //menu = 主页面2
}
MotorOperation();
break;
case display_page2:
SensorDataDisplay2(); //显示传感器2数据
OLED_Menu2(); //显示主页面2固定信息
if (KeyNum == KEY_2) //是否按下按键2
{
KeyNum = 0;
OLED_Clear(); //清屏
menu = display_page1; //menu = 主页面1
}
MotorOperation();
break;
case settingsPage:
//从主页面跳转至设置页面时进行一次清屏
if (OLED_Clear_Flag)
{
OLED_Clear_Flag = 0; //清除清屏标志位
OLED_Clear(); //清屏
}
ThresholdModification(SetSelection()); //调节传感器阈值
OLED_Option(SetSelection()); //获取按键次数,从而判断“>”显示位置
//按键次数小于等于4时,显示设置页面1
if (SetSelection() <= 4)
{
settingsThresholdDisplay1(); //显示传感器阈值1数据
OLED_settingsPage1(); //显示阈值设置界面1固定信息
}
else //否则显示设置页面2
{
settingsThresholdDisplay2(); //显示传感器阈值2数据
OLED_settingsPage2(); //显示阈值设置界面2固定信息
}
if (KeyNum == KEY_2) //判断用户是否按下退出按键
{
KeyNum = 0;
OLED_Clear(); //清屏
menu = display_page1; //回到主页面1
//存储修改的传感器阈值至flash内
FLASH_W(FLASH_START_ADDR, Sensorthreshold.CO2Value, Sensorthreshold.luxValue,
Sensorthreshold.tempValue, Sensorthreshold.humiValue,
Sensorthreshold.soilTempValue, Sensorthreshold.soilHumiValue);
}
break;
default: break;
}
userHandle(); //更新机智云数据点变量存储的值
gizwitsHandle((dataPoint_t *)¤tDataPoint); //数据上传至机智云
}
}
六、实验效果

七、资料内容










![[Algorithm][贪心][K次取反后最大化的数组和][身高排序][优势洗牌][最长回文串]详细讲解](https://img-blog.csdnimg.cn/direct/789305ffb5964cf1865e71b9e52e115f.png)