点云配准及特征提取详细解读
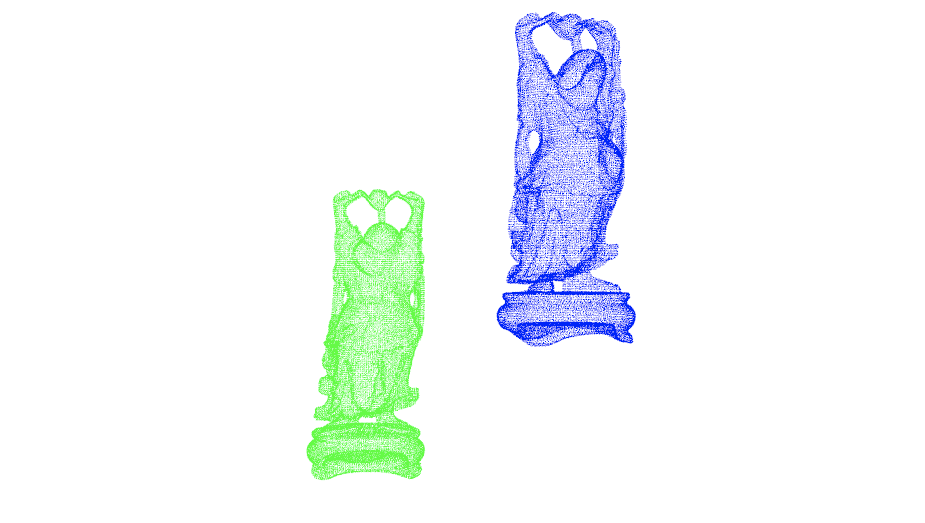
本篇博客将介绍一个用于点云配准的 C++ 代码示例,该示例使用 PCL(Point Cloud Library)库来处理和配准两个点云数据集。我们将逐步解析代码的关键部分,并解释每个步骤的作用。
代码说明
代码的整体结构及其主要功能:
int main(int argc, char** argv) {
// 设置两个点云文件的路径
const char* filename = "/home/guo/radar/data/altos_pcd/1715331925.484444354.pcd";
const char* filename0 = "/home/guo/radar/data/altos_pcd/1715331925.986247311.pcd";
// 读取点云数据 //
// 定义并读取源点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_source1(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile(filename, *cloud_source1);
cout << "源点云大小: " << cloud_source1->size() << endl;
// 定义目标点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_