YOLO介绍
YOLO学习手册:YOLO教程
YOLO [ˈjoʊloʊ](You Only Look Once)是一种快速而准确的目标检测算法,由Joseph Redmon等人在2016年提出。YOLO被广泛应用于计算机视觉领域,包括实时视频分析、自动驾驶、安防监控、智能交通、缺陷检测等。与传统的目标检测方法不同,YOLO将目标检测问题视为一个单一的回归问题,从输入图像的像素到输出的边界框和类别。
在YOLO诞生之前,目标检测领域热门的深度学习模型是R-CNN系列模型,称之为二阶段模型(two-stage),其大致思路是先找出可能含有物体的区域,进而再找出这片区域内的物体是什么,在哪个位置。这类模型的特点是准确率较高,但是速度较慢,难以做到实时检测。
YOLO版本特点
YOLO算法自推出以来,经过了多个版本的更新,每个版本都带来了不同的改进和优化。以下是各主要版本的改进功能:
YOLO v1
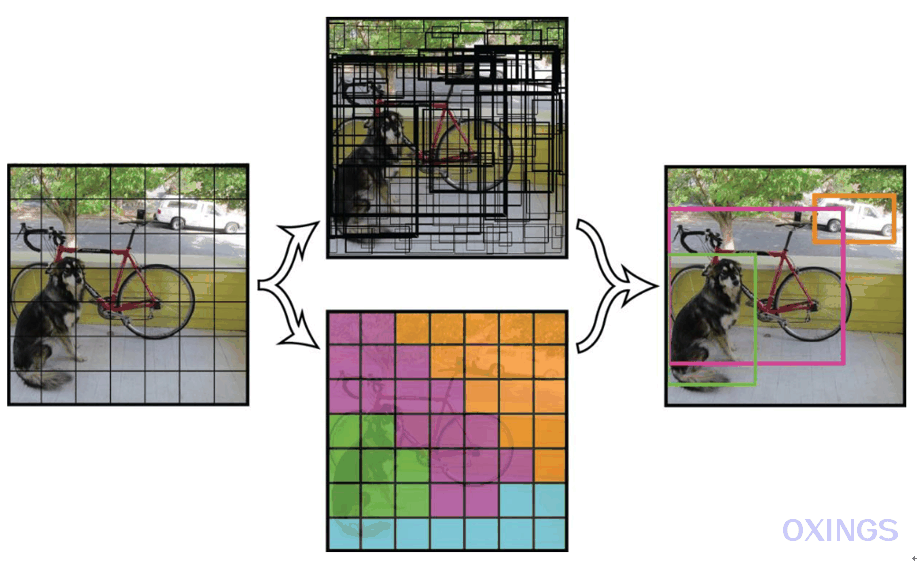
- YOLO v1是在2016年提出的,首次将目标检测任务简化为一个单一的回归问题。
- 单阶段检测:使用一个单一的卷积神经网络(CNN)在一次前向传播中完成目标检测。
- 速度快:具有较高的检测速度,能够实现实时检测。
YOLO v2 (YOLO9000)
- 改进特征提取网络:使用Darknet-19作为特征提取网络,提升模型的特征提取能力。
- Batch Normalization:引入了批量归一化,提升了模型的稳定性和收敛速度。
- 高分辨率分类器:在分类任务中使用高分辨率图像进行训练,提升了特征提取的细节能力。
- 多尺度训练:在训练过程中随机改变输入图像的分辨率,提高了模型对不同尺度目标的适应性。
- 使用Anchor Boxes:引入了先验框(anchor boxes),提高检测精度,特别是对小目标。
YOLO v3
- 改进特征提取网络:使用了Darknet-53作为特征提取网络,提高了模型的表现力。
- 多尺度预测:在不同的特征层上进行目标预测,能够更好地处理不同尺度的目标。
- 改进Anchor Boxes:对anchor boxes进行了重新设计和优化,进一步提升了检测精度。
- 分类损失函数:采用了二元交叉熵损失函数,提高了分类的鲁棒性。
YOLO v4
- 改进特征提取网络:使用了CSPDarknet53,结合了跨阶段部分网络(CSPNet),减少了计算量并提高了准确性。
- Bag of Freebies和Bag of Specials:通过引入各种训练技巧(如Mosaic数据增强、Self-Adversarial Training)和推理技巧(如Mish激活函数、CIOU损失函数),提升了模型性能。
- 改进的Post-Processing:引入了DIoU-NMS,减少了非极大值抑制(NMS)过程中对目标框的误删。
YOLO v5
- PyTorch实现:YOLO v5由Ultralytics发布,基于PyTorch实现,简化训练和部署流程。
- 轻量化和模块化设计:提供多种模型规模(如YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x),适应不同的应用需求。
- 自动锚点生成:引入了自动锚点生成机制,进一步优化了anchor boxes。
- 高效的数据增强:包括Mosaic、MixUp等数据增强技术,提升了模型的鲁棒性。
YOLO v6
- 2022 年由美团开源,目前已用于该公司的许多自主配送机器人。
- 更高效的架构:引入了更高效的特征提取网络和优化的检测头,进一步提升了检测速度和精度。
- 改进的训练策略:包括更高效的学习率调度、数据增强和损失函数优化。
- 更强的泛化能力:在不同数据集上的表现更加稳定和优异。
YOLO v7
- 优化网络结构:进一步优化网络结构,使得模型在保证精度的同时提高了推理速度。
- 更好的多尺度检测:改进了多尺度检测策略,提高了对小目标和大目标的检测精度。
- 集成更多特性:结合了YOLO v4和v5中的许多先进技术,进一步提升了整体性能。
YOLO v8
- YOLOv8 支持全方位的视觉 AI 任务,包括检测、分割、姿态估计、跟踪和分类。
YOLO v9
- 引入了可编程梯度信息 (PGI) 和通用高效层聚合网络 (GELAN) 等创新方法。
YOLO运行环境
YOLO搭建实例:YOLO教程
YOLO依赖python和pytorch,可跨平台运行,由于网络环境等原因,尽量使用国内镜像或离线方式安装。
安装Python3
下载Python安装包并安装Python环境。Python官网:https://www.python.org/
安装Pytorch
PyTorch是一个开源的深度学习框架,该框架由Facebook人工智能研究院开发,底层基于Torch,但实现与运用全部是由Python来完成。 PyTorch官网:https://pytorch.org
如果显卡不支持CUDA,选择CPU版本,生成在线安装命令(需联网下载):
conda install pytorch torchvision torchaudio cpuonly -c pytorch
安装完成后,运行python程序验证是否成功
import torch
print(torch.__version__)
print(torch.cuda.is_available())
下载YOLO
以YOLOv5为例,YOLO下载地址:https://github.com/ultralytics/yolov5/archive/refs/tags/v7.0.zip
目录结构:
data: 数据集相关,包括训练集、验证集和测试集的配置信息,以及数据增强脚本等。
models: 预训练模型和自定义模型文件,包括权重文件和配置文件等。
utils: 工具函数库,包含一些辅助函数,例如数据处理、可视化和模型评估等。
train.py: 训练脚本,用于启动训练过程。
detect.py: 检测脚本,用于使用训练好的模型进行目标检测。
val.py: 验证脚本,用于评估模型在验证集上的性能。
export.py: 导出脚本,用于将训练好的模型导出为其他格式,例如 ONNX 或 TensorRT。
requirements.txt: 项目依赖库列表。
README.md: 项目说明文档。
安装YOLO依赖包:pip install -r requirements.txt
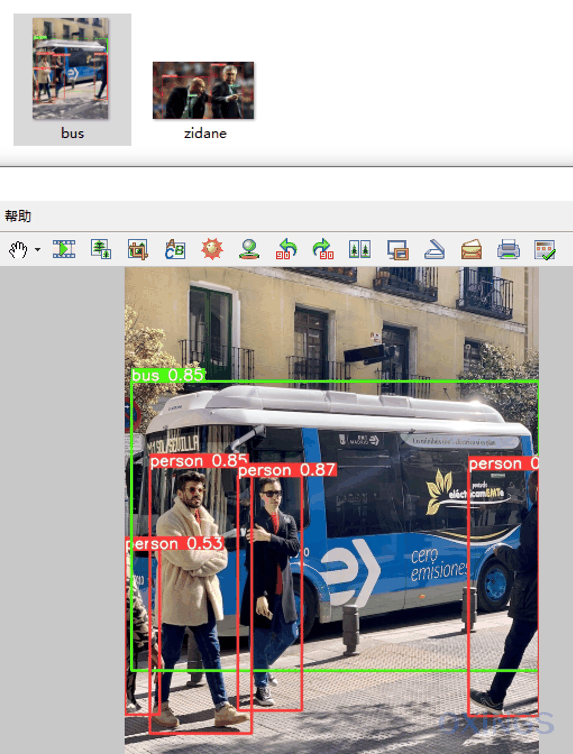
检测图片
YOLO目录自带2张图片,可以直接运行检测程序:python detect.py
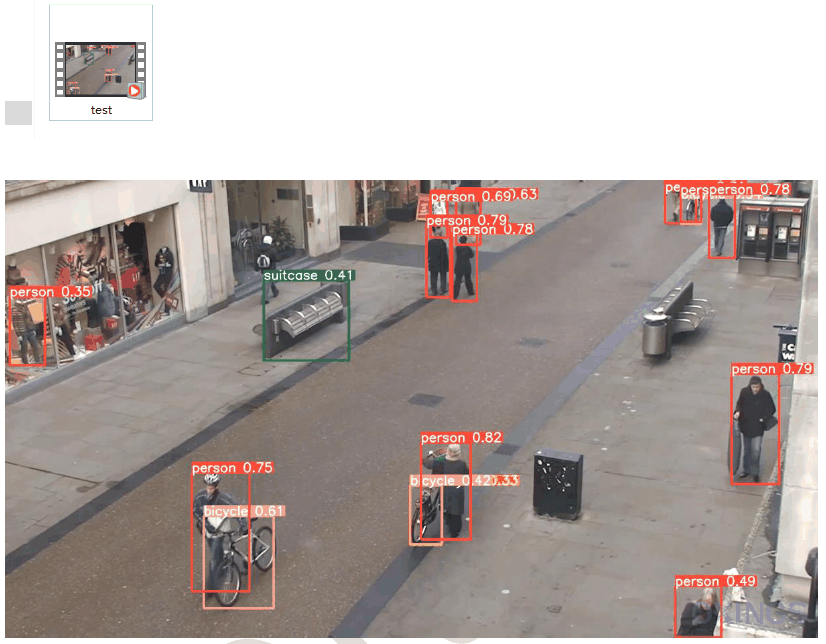
检测视频
指定视频文件作为输入源,如下命令检测视频目标物:
python detect.py --source ./data/video/test.mp4
以上是使用YOLO自带模型和图片,运行比较容易。在实际应用中,需要针对场景和目标物,整理自己的数据和训练模型,还是比较花时间的。如何训练模型和指定目标物,可参考YOLO学习手册:YOLO教程
YOLO应用前景
YOLO有一些限制和局限性,需要针对不同的应用场景选取合适的算法。随着计算机视觉和人工智能技术的不断发展,YOLO 检测技术有望得到广泛应用。对于自动驾驶、安防监控、智能交通等领域,YOLO 的快速准确的目标检测能力将发挥重要作用。同时,随着硬件性能的提升和算法优化的不断完善,YOLO 算法的性能和效果也将不断提升,为各种实时场景下的目标检测任务提供更好的解决方案。
YOLO检测环境安装配置YOLO实例 检测环境安装配置![]() https://blog.oxings.com/article/117
https://blog.oxings.com/article/117