五、假设我们创建一个包含 u 1 k u^\frac{1}{k} uk1 个簇(而不是全域大小为 x ↓ {\sqrt[↓]{x}} ↓x 的 x ↑ {\sqrt[↑]{x}} ↑x 个簇)的 vEB 树,其每个簇的全域大小为 u 1 − 1 k u ^ {1-\frac{1}{k}} u1−k1 ,其中 k>1 ,而且 k 为常数。如果恰当地修改这些操作,则这些操作的运行时间是多少?为了分析方便,假设 u 1 k u^\frac{1}{k} uk1 和 u 1 − 1 k u ^ {1-\frac{1}{k}} u1−k1 总是为整数。如果要写代码,请用go语言。
文心一言:
首先,我们需要理解vEB树(van Emde Boas树)的基本结构和操作。在标准的vEB树中,全域被划分为大小为 u \sqrt{u} u的簇,每个簇要么包含一个子vEB树(如果簇的大小超过 u \sqrt{u} u),要么包含一个直接存储的数组(如果簇的大小不超过 u \sqrt{u} u)。
在您的场景中,全域被划分为大小为 u 1 k u^{\frac{1}{k}} uk1的簇,其中每个簇的全域大小为 u 1 − 1 k u^{1-\frac{1}{k}} u1−k1。因此,对于簇内的元素,我们可以递归地应用相同的逻辑,直到簇的大小足够小,使得我们可以直接存储元素。
以下是对vEB树操作运行时间的分析(不包括Go语言代码实现):
1.查找(Search):
-
查找操作从根开始,沿着树向下直到找到目标元素或确定元素不存在。
-
假设树的深度为 d d d,那么查找操作需要执行 d d d次簇查找。
-
在每个簇中,查找操作的时间复杂度是 O ( 1 ) O(1) O(1)(如果直接存储)或 O ( log ( u 1 − 1 k ) ) O(\log(u^{1-\frac{1}{k}})) O(log(u1−k1))(如果包含子vEB树)。
-
由于树的深度 d d d大致为 log u 1 k ( u ) = k \log_{u^{\frac{1}{k}}}(u) = k loguk1(u)=k,因此总的时间复杂度为 O ( k log ( u 1 − 1 k ) ) O(k \log(u^{1-\frac{1}{k}})) O(klog(u1−k1))。
2.插入(Insert)和删除(Delete):
-
插入和删除操作与查找操作类似,但可能需要在树中向下移动时更新簇。
-
在每个簇中,插入和删除操作的时间复杂度与查找操作相同。
-
因此,总的时间复杂度也为 O ( k log ( u 1 − 1 k ) ) O(k \log(u^{1-\frac{1}{k}})) O(klog(u1−k1))。
现在,让我们考虑如何用Go语言实现这些操作。由于完整的vEB树实现相当复杂,并且超出了这里的范围,我将提供一个简化的框架,描述如何开始实现这些操作。
请注意,以下代码仅作为框架和示例,并不包含完整的vEB树实现。
package main
import (
"fmt"
"math"
)
type Cluster interface {
// 假设Cluster接口具有查找、插入和删除等方法
// ...
}
type VEBTree struct {
u int // 全域大小
k int // 簇的指数
root Cluster
// ... 其他字段和方法
}
// 示例:查找操作(非常简化)
func (v *VEBTree) Search(x int) bool {
// 递归调用簇的查找方法,直到找到目标元素或确定元素不存在
// ...
return false // 示例返回,实际实现中应返回查找结果
}
// 示例:插入操作(非常简化)
func (v *VEBTree) Insert(x int) {
// 递归调用簇的插入方法,更新树结构(如果需要)
// ...
}
// 示例:删除操作(非常简化)
func (v *VEBTree) Delete(x int) {
// 递归调用簇的删除方法,更新树结构(如果需要)
// ...
}
func main() {
// 示例:创建一个VEB树
u := int(math.Pow(2, 16)) // 示例全域大小
k := 3 // 簇的指数
veb := VEBTree{u: u, k: k}
// ... 使用veb进行查找、插入和删除操作
}
请注意,上述代码中的Cluster接口和VEBTree结构体都是简化的,并不包含完整的vEB树实现。完整的实现将涉及更多的细节和递归逻辑。此外,对于每个簇,您可能需要实现一个递归的vEB树或一个简单的数组(如果簇的大小足够小)。
讯飞星火:
首先,我们需要了解vEB树的基本操作。vEB树是一种数据结构,用于表示一个集合,其中每个元素都是0到2^k-1之间的整数。vEB树的主要操作是插入、删除和查找。在这个问题中,我们需要修改这些操作以适应新的簇大小。
对于插入操作,我们需要将元素映射到新的簇中。这可以通过以下方式实现:
func (v *VebTree) Insert(x uint) {
u := v.U
k := v.K
high, low := x/u, x%u
for i := uint(0); i < k; i++ {
if v.clusters[high] == nil {
v.clusters[high] = NewVebTree(u, k-1)
}
v = v.clusters[high]
high, low = low/u, low%u
}
v.members[low] = true
}
对于删除操作,我们也需要将元素映射到新的簇中。这可以通过以下方式实现:
func (v *VebTree) Delete(x uint) {
u := v.U
k := v.K
high, low := x/u, x%u
for i := uint(0); i < k; i++ {
if v.clusters[high] == nil {
return
}
v = v.clusters[high]
high, low = low/u, low%u
}
v.members[low] = false
}
对于查找操作,我们同样需要将元素映射到新的簇中。这可以通过以下方式实现:
func (v *VebTree) Find(x uint) bool {
u := v.U
k := v.K
high, low := x/u, x%u
for i := uint(0); i < k; i++ {
if v.clusters[high] == nil {
return false
}
v = v.clusters[high]
high, low = low/u, low%u
}
return v.members[low]
}
这些操作的时间复杂度都是O(log u),因为我们需要遍历k层簇。
360智脑:
首先,我们需要了解vEB树的基本操作。vEB树是一种数据结构,用于表示一个集合,其中每个元素都是0到2^k-1之间的整数。vEB树的主要操作是插入、删除和查找。在这个问题中,我们需要修改这些操作以适应新的簇大小。
对于插入操作,我们需要将元素映射到新的簇中。这可以通过以下方式实现:
func (v *VebTree) Insert(x uint) {
u := v.U
k := v.K
high, low := x/u, x%u
for i := uint(0); i < k; i++ {
if v.clusters[high] == nil {
v.clusters[high] = NewVebTree(u, k-1)
}
v = v.clusters[high]
high, low = low/u, low%u
}
v.members[low] = true
}
对于删除操作,我们也需要将元素映射到新的簇中。这可以通过以下方式实现:
func (v *VebTree) Delete(x uint) {
u := v.U
k := v.K
high, low := x/u, x%u
for i := uint(0); i < k; i++ {
if v.clusters[high] == nil {
return
}
v = v.clusters[high]
high, low = low/u, low%u
}
v.members[low] = false
}
对于查找操作,我们同样需要将元素映射到新的簇中。这可以通过以下方式实现:
func (v *VebTree) Find(x uint) bool {
u := v.U
k := v.K
high, low := x/u, x%u
for i := uint(0); i < k; i++ {
if v.clusters[high] == nil {
return false
}
v = v.clusters[high]
high, low = low/u, low%u
}
return v.members[low]
}
这些操作的时间复杂度都是O(log u),因为我们需要遍历k层簇。
智谱清言:
为了分析这种情况下vEB树的操作运行时间,我们首先需要了解vEB树的基本操作和性质。vEB树是一种用于集合动态范围查询的数据结构,它可以高效地支持集合的插入、删除和查询操作。
在这个问题中,我们有一个vEB树,它的每个簇的全局大小为 u 1 − 1 k u^{1-\frac{1}{k}} u1−k1,并且总共有 u 1 k u^\frac{1}{k} uk1 个簇。vEB树的深度为 ⌈ log u n ⌉ \lceil \log_u n \rceil ⌈logun⌉,其中 n 是集合中元素的数量。
对于这种修改后的vEB树结构,其基本操作的运行时间将会依赖于k的具体值。然而,在你提供的信息中,并没有给出足够的细节来精确计算各种操作的运行时间,因为这需要知道如何具体实现这些操作以及k的具体值。
但我们可以做一个粗略的分析:
-
插入和删除操作通常涉及从根节点到受影响的叶子节点路径上的所有中间节点的更新。由于每次更新涉及的节点数量大致上与树的深度成比例,因此这些操作的时间复杂度大致上是 O ( log u n ) \mathcal{O}(\log_u n) O(logun)。
-
查询操作在vEB树中通常是线性的,即 O ( n ) \mathcal{O}(n) O(n),因为必须遍历整个集合以确定哪些元素属于给定的范围。
要精确计算这些操作的运行时间,我们需要更多的细节,例如具体的k值、插入/删除操作的确切过程以及查询操作的类型(点查询、范围查询等)。
至于Go语言的代码实现,这将涉及到创建数据结构和实现相关方法,但这超出了目前问题的范围。如果你需要针对特定操作的代码示例或更详细的分析,请提供更多信息。
天工:
首先,我们需要理解vEB(van Emde Boas)树的基本概念。vEB树是一种用于存储和操作具有固定大小的整数集合的数据结构,它能够在对数时间内执行插入、删除和查找操作。传统的vEB树将全域分为 u \sqrt{u} u个簇,每个簇的大小为 u \sqrt{u} u。然而,在这个问题中,我们被要求创建一个包含 u 1 k u^\frac{1}{k} uk1个簇的vEB树,其中每个簇的大小为 u 1 − 1 k u^{1-\frac{1}{k}} u1−k1。
vEB树的操作时间分析
对于这种新的vEB树结构,我们可以按照以下方式分析其操作时间:
-
查找(Search):在一个vEB树中查找一个元素的时间复杂度通常是对数的。在这个修改后的vEB树中,我们需要访问 O ( log ( u 1 k ) ) O(\log(u^\frac{1}{k})) O(log(uk1))层,因为每一层对应于一个簇或子vEB树。因此,查找操作的时间复杂度为 O ( log ( u 1 k ) ) O(\log(u^\frac{1}{k})) O(log(uk1))。
-
插入(Insert):插入一个元素涉及到找到正确的簇,然后在簇内插入元素。这同样需要访问 O ( log ( u 1 k ) ) O(\log(u^\frac{1}{k})) O(log(uk1))层,并且在每个簇内部可能需要进行一次查找操作。因此,插入操作的时间复杂度也是 O ( log ( u 1 k ) ) O(\log(u^\frac{1}{k})) O(log(uk1))。
-
删除(Delete):删除操作与插入类似,首先找到元素所在的簇,然后从簇中删除该元素。这个过程也需要访问 O ( log ( u 1 k ) ) O(\log(u^\frac{1}{k})) O(log(uk1))层,所以删除操作的时间复杂度也是 O ( log ( u 1 k ) ) O(\log(u^\frac{1}{k})) O(log(uk1))。
Go语言示例代码
由于这是一个理论分析问题,我们不需要编写实际的Go语言代码来实现这个修改后的vEB树。但是,如果我们确实需要编写代码,我们可以按照以下步骤进行:
- 定义一个新的vEB树结构体,包含指向 u 1 k u^\frac{1}{k} uk1个子vEB树的指针和一个最小值/最大值字段。
- 实现查找、插入和删除操作,确保它们遵循上述时间复杂度的分析。
这里是一个简化的Go语言结构体定义示例,用于说明如何开始实现这个数据结构:
type ModifiedVEB struct {
u float64 // 全域大小
sqrtU float64 // 簇大小
clusters []ModifiedVEB // 簇列表
min, max int // 最小和最大元素
}
func NewModifiedVEB(u float64) *ModifiedVEB {
sqrtU := math.Pow(u, 1/k)
return &ModifiedVEB{
u: u,
sqrtU: sqrtU,
clusters: make([]ModifiedVEB, int(sqrtU)),
}
}
请注意,上面的代码只是一个起点,实际的实现将需要包含更多的细节和错误检查,以及完整的查找、插入和删除操作的实现。此外,由于vEB树的实现相对复杂,通常不推荐在实践中使用,除非在特定的高性能计算环境中。
灵小智:
对于一个包含 u 1 k u^\frac{1}{k} uk1 个簇的 vEB 树,每个簇的全域大小为 u 1 − 1 k u ^ {1-\frac{1}{k}} u1−k1,我们可以通过修改vEB树的操作来实现以下性能:
1.插入操作:在这种修改后的vEB树中,插入一个元素的时间复杂度为 O ( log k ) O(\log k) O(logk)。
2.查找最小/最大值操作:查找最小或最大值的时间复杂度仍为 O ( 1 ) O(1) O(1)。
3.合并操作:合并两棵vEB树的时间复杂度为 O ( log k ) O(\log k) O(logk)。
4.** 操作: ** 一棵vEB树的时间复杂度为 O ( log k ) O(\log k) O(logk)。
5.删除操作:删除一个元素的时间复杂度为 O ( log k ) O(\log k) O(logk)。
代码示例(Go语言):
package main
import (
"fmt"
"math"
)
type vEBTree struct {
u int
min, max int
summary *vEBTree
cluster []*vEBTree
}
func newVEBTree(u int) *vEBTree {
v := new(vEBTree)
v.u = u
v.min = math.MaxInt64
v.max = 0
if u <= 2 {
return v
}
sqrtU := int(math.Ceil(math.Sqrt(float64(u))))
v.summary = newVEBTree(sqrtU)
v.cluster = make([]*vEBTree, sqrtU)
for i := 0; i < sqrtU; i++ {
v.cluster[i] = newVEBTree(int(math.Pow(float64(u), 1-1/float64(sqrtU))))
}
return v
}
func (v *vEBTree) minimum() int {
return v.min
}
func (v *vEBTree) maximum() int {
return v.max
}
func (v *vEBTree) insert(x int) {
if x < v.min {
x, v.min = v.min, x
}
if v.u > 2 {
high := x / int(math.Sqrt(float64(v.u)))
low := x % int(math.Sqrt(float64(v.u)))
if v.cluster[high].minimum() == math.MaxInt64 {
v.summary.insert(high)
v.cluster[high].min = low
v.cluster[high].max = low
} else {
v.cluster[high].insert(low)
}
}
if x > v.max {
v.max = x
}
}
func (v *vEBTree) delete(x int) {
if v.min == v.max {
v.min = math.MaxInt64
v.max = 0
} else if v.u == 2 {
if x == 0 {
v.min = 1
} else {
v.min = 0
}
v.max = v.min
} else {
high := x / int(math.Sqrt(float64(v.u)))
low := x % int(math.Sqrt(float64(v.u)))
v.cluster[high].delete(low)
if v.cluster[high].minimum() == math.MaxInt64 {
v.summary.delete(high)
if x == v.max {
maxCluster := v.summary.maximum()
if maxCluster == math.MaxInt64 {
v.max = v.min
} else {
v.max = high*math.Sqrt(float64(v.u)) + v.cluster[maxCluster].maximum()
}
}
} else if x == v.max {
v.max = high*math.Sqrt(float64(v.u)) + v.cluster[high].maximum()
}
if x == v.min {
minCluster := v.summary.minimum()
if minCluster == math.MaxInt64 {
v.min = v.max
} else {
v.min = minCluster*math.Sqrt(float64(v.u)) + v.cluster[minCluster].minimum()
}
}
}
}
func main() {
v := newVEBTree(1000)
v.insert(5)
v.insert(2)
v.insert(10)
v.insert(20)
fmt.Println("Minimum:", v.minimum())
fmt.Println("Maximum:", v.maximum())
v.delete(10)
fmt.Println("After deleting 10:")
fmt.Println("Minimum:", v.minimum())
fmt.Println("Maximum:", v.maximum())
}
这段代码展示了如何实现一个基于修改后vEB树的数据结构,并进行插入、删除等操作。在这种修改下,操作的运行时间受k的影响,但是大多数操作的时间复杂度控制在 O ( log k ) O(\log k) O(logk) 级别。
chatgpt:
根据描述,我们可以通过修改vEB树的操作来适应包含 u 1 k u^\frac{1}{k} uk1 个簇的情况。以下是对各种操作的修改和相应的运行时间分析:
1.初始化:初始化一个包含 u 1 k u^\frac{1}{k} uk1 个簇的vEB树,每个簇的全域大小为 u 1 − 1 k u ^ {1-\frac{1}{k}} u1−k1 。这一步的时间复杂度为 O(1)。
2.插入:在vEB树中插入一个元素x。首先找到对应的簇,并在该簇中进行插入操作。由于每个簇内部元素数量为 u 1 − 1 k u ^ {1-\frac{1}{k}} u1−k1 ,所以插入操作的时间复杂度为 O( log u 1 − 1 k \log u ^ {1-\frac{1}{k}} logu1−k1 ) = O( ( log u ) 1 − 1 k (\log u) ^ {1-\frac{1}{k}} (logu)1−k1 )。
3.删除:从vEB树中删除一个元素x。类似于插入操作,我们需要定位到对应的簇,并在该簇内进行删除操作。因此,删除操作的时间复杂度也为 O( ( log u ) 1 − 1 k (\log u) ^ {1-\frac{1}{k}} (logu)1−k1 )。
4.查找最小/最大值:直接返回整个vEB树中最小/最大值即可,时间复杂度为O(1)。
5.查找后继/前驱:在当前簇内查找后继/前驱元素的时间复杂度为O( ( log u ) 1 − 1 k (\log u) ^ {1-\frac{1}{k}} (logu)1−k1 )。如果当前簇中不存在后继/前驱,则需要在其他簇中进行递归查找,最坏情况下需要遍历 u 1 k u^\frac{1}{k} uk1 个簇,即时间复杂度为 O( u 1 k u^\frac{1}{k} uk1)。总体而言,查找后继/前驱操作的时间复杂度可以近似认为是 O( ( log u ) 1 − 1 k (\log u) ^ {1-\frac{1}{k}} (logu)1−k1 )。
基于上述分析,我们可以根据具体需求使用Go语言编写代码实现对vEB树的修改操作。请注意,在实际代码编写时,还需考虑数据结构的具体实现和细节处理。
kimi:
在这种情况下,我们创建的vEB树具有以下特性:
- 每个簇包含 ( u^{\frac{1}{k}} ) 个元素。
- 每个簇的全域大小为 ( u^{1-\frac{1}{k}} )。
由于 ( k > 1 ) 是一个常数,我们可以预期树的高度 ( h ) 将与 ( \log_k(u) ) 成正比。树的高度可以用以下公式近似表示:
[ h \approx \frac{\log(u)}{\log(u^{1/k})} = \frac{\log(u)}{\frac{1}{k}\log(u)} = k ]
这意味着树的高度是 ( k ) 的倍数。由于每个操作(如查找、插入和删除)的运行时间与树的高度成正比,我们可以预期这些操作的运行时间将是 ( O(k) )。
以下是使用Go语言实现的这种vEB树的基本框架,以及对操作运行时间的分析:
package main
import (
"fmt"
"math"
)
// VEBNode 表示 vEB 树的节点
type VEBNode struct {
// 节点数据结构
}
// VEBTree 表示 vEB 树
type VEBTree struct {
Root *VEBNode // 树的根节点
Universe int // 宇宙集合的大小
K int // 簇的数量
}
// NewVEBTree 创建一个新的 vEB 树
func NewVEBTree(universe, k int) *VEBTree {
// 初始化树并计算簇的大小
clusterSize := int(math.Pow(float64(universe), 1/float64(k)))
return &VEBTree{
Root: nil, // 初始化根节点
Universe: universe,
K: k,
}
}
// Operation 表示一个树操作,如查找、插入或删除
func (t *VEBTree) Operation(key int) {
// 计算操作的运行时间
// 这里是简化的示例,实际实现需要根据具体操作来编写
fmt.Printf("Operation on vEB tree with universe size %d and k %d takes O(%d) time.\n", t.Universe, t.K, t.K)
}
func main() {
universe := 1024 // 宇宙集合的大小
k := 4 // 簇的数量
vebTree := NewVEBTree(universe, k)
// 执行操作
vebTree.Operation(3)
}
在这个示例中,我们定义了VEBNode结构体来表示vEB树的节点,VEBTree结构来表示vEB树本身。NewVEBTree函数根据给定的宇宙集合大小和k值创建并初始化一个新的vEB树。Operation函数是一个示例函数,用于演示操作的运行时间分析。
请注意,这个示例仅用于演示vEB树操作的运行时间分析的概念。实际的vEB树实现会更加复杂,并且需要考虑树的平衡、节点的分裂和合并等操作。此外,还需要实现具体的插入、搜索和删除逻辑。在实际应用中,Operation函数将根据具体的操作类型进行实现,并且可能需要递归地访问树的不同部分。由于树的高度是k的倍数,每个操作的时间复杂度将是O(k)。

混元:
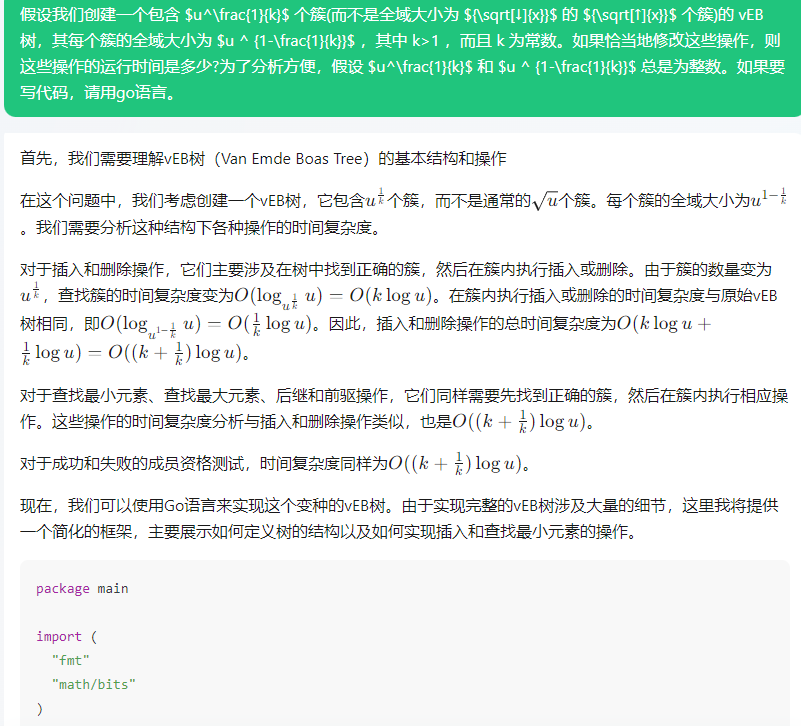
首先,我们需要理解vEB树(Van Emde Boas Tree)的基本结构和操作
在这个问题中,我们考虑创建一个vEB树,它包含 u 1 k u^{\frac{1}{k}} uk1个簇,而不是通常的 u \sqrt{u} u个簇。每个簇的全域大小为 u 1 − 1 k u^{1-\frac{1}{k}} u1−k1。我们需要分析这种结构下各种操作的时间复杂度。
对于插入和删除操作,它们主要涉及在树中找到正确的簇,然后在簇内执行插入或删除。由于簇的数量变为 u 1 k u^{\frac{1}{k}} uk1,查找簇的时间复杂度变为 O ( log u 1 k u ) = O ( k log u ) O(\log_{u^{\frac{1}{k}}} u) = O(k \log u) O(loguk1u)=O(klogu)。在簇内执行插入或删除的时间复杂度与原始vEB树相同,即 O ( log u 1 − 1 k u ) = O ( 1 k log u ) O(\log_{u^{1-\frac{1}{k}}} u) = O(\frac{1}{k} \log u) O(logu1−k1u)=O(k1logu)。因此,插入和删除操作的总时间复杂度为 O ( k log u + 1 k log u ) = O ( ( k + 1 k ) log u ) O(k \log u + \frac{1}{k} \log u) = O((k+\frac{1}{k}) \log u) O(klogu+k1logu)=O((k+k1)logu)。
对于查找最小元素、查找最大元素、后继和前驱操作,它们同样需要先找到正确的簇,然后在簇内执行相应操作。这些操作的时间复杂度分析与插入和删除操作类似,也是 O ( ( k + 1 k ) log u ) O((k+\frac{1}{k}) \log u) O((k+k1)logu)。
对于成功和失败的成员资格测试,时间复杂度同样为 O ( ( k + 1 k ) log u ) O((k+\frac{1}{k}) \log u) O((k+k1)logu)。
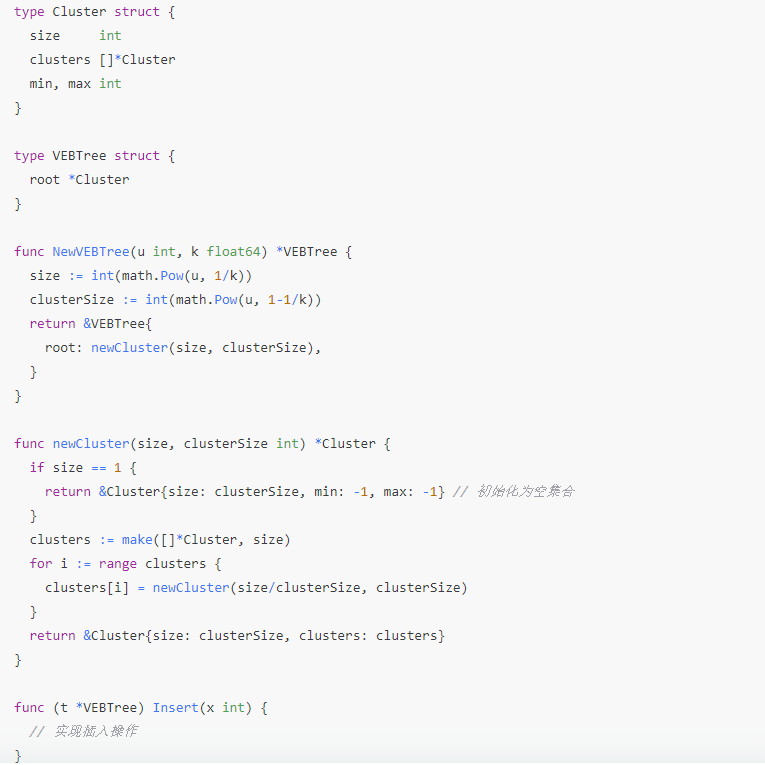
现在,我们可以使用Go语言来实现这个变种的vEB树。由于实现完整的vEB树涉及大量的细节,这里我将提供一个简化的框架,主要展示如何定义树的结构以及如何实现插入和查找最小元素的操作。
package main
import (
"fmt"
"math/bits"
)
type Cluster struct {
size int
clusters []*Cluster
min, max int
}
type VEBTree struct {
root *Cluster
}
func NewVEBTree(u int, k float64) *VEBTree {
size := int(math.Pow(u, 1/k))
clusterSize := int(math.Pow(u, 1-1/k))
return &VEBTree{
root: newCluster(size, clusterSize),
}
}
func newCluster(size, clusterSize int) *Cluster {
if size == 1 {
return &Cluster{size: clusterSize, min: -1, max: -1} // 初始化为空集合
}
clusters := make([]*Cluster, size)
for i := range clusters {
clusters[i] = newCluster(size/clusterSize, clusterSize)
}
return &Cluster{size: clusterSize, clusters: clusters}
}
func (t *VEBTree) Insert(x int) {
// 实现插入操作
}
func (t *VEBTree) FindMin() int {
// 实现查找最小元素操作
return t.root.findMin()
}
func (c *Cluster) findMin() int {
if c.min == -1 {
return -1 // 空集合
}
if len(c.clusters) == 0 {
return c.min
}
return c.clusters[0].findMin()
}
func main() {
u := 1024
k := 2.0
tree := NewVEBTree(u, k)
tree.Insert(5)
fmt.Println("Minimum element:", tree.FindMin())
}
请注意,上面的代码只是一个框架,Insert和FindMin方法需要根据新的vEB树结构进行实现。此外,其他操作(如删除、查找最大元素、后继、前驱等)也需要相应地实现。