连载文章,长期更新,欢迎关注:
下面将从原理分析、源码解读和安装与运行这3个方面展开讲解SVO算法。
9.3.1 SVO原理分析
前面已经说过,SVO算法是半直接法的典型代表。因此在下面的分析中,首先介绍一下半直接法的基本原理,然后合论文[10]对SVO系统框架展开具体分析。
1.半直接法
回顾一下,在特征点法中,先通过特征提取和特征匹配建立两帧图像之间的数据关联,然后最小化重投影误差求解相机位姿和地图云点;而在直接法中,直接在两帧图像的像素上建立数据关联,然后最小光度误差求解相机位姿和地图云点。特征帧点无疑比普通像素点具有更好的鲁棒性,而直接法中最小化光度误差数据关联比特征点法中先特征匹配然后最小化重投影误差更高效,那么结合两者的优点就是半直接法了。
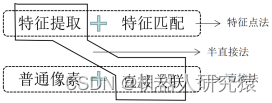
图9-54 半直接法
2.SVO系统框架
到这里就可以介绍SVO系统框架了,如图9-55所示。其实就是由运动估计(Motion Estimation Thread)和建图(Mapping Thread)双线程构成,而运动估计又细分成基于稀疏模型的图像配准(Sparse Model-based Image Alignment)、特征配准(Feature Alignment)和位姿结构优化(Pose & Structure Refinement)。
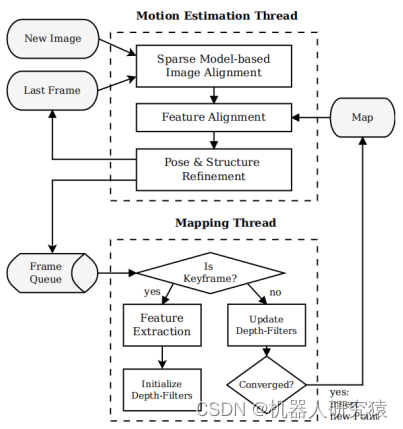
图9-55 SVO系统框架
(1)基于稀疏模型的图像配准(Sparse Model-based Image Alignment)
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
(2)特征配准(Feature Alignment)
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
(3)位姿结构优化(Pose & Structure Refinement)
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
(4)深度估计
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
9.3.2 SVO源码解读
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
参考文献
【1】 张虎,机器人SLAM导航核心技术与实战[M]. 机械工业出版社,2022.