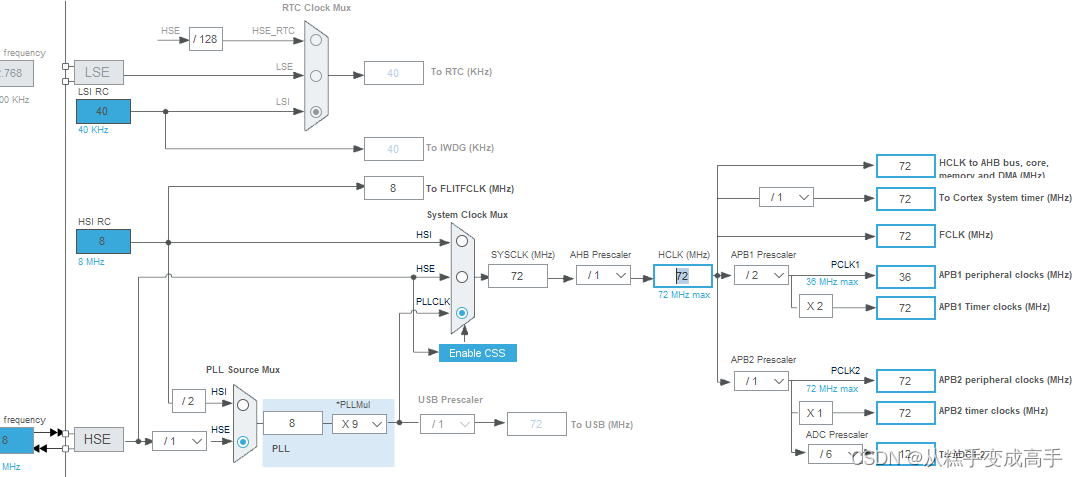
我们使用的是STM32CubeMX软件和MDK5
芯片使用的是STM32F103C8T6
完成对STM32CubeMX的初始化后开始我们的第一步点亮一个LED灯
一、点亮LED灯
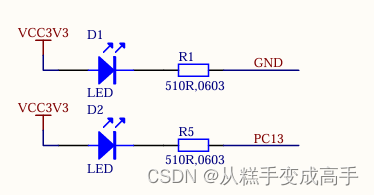
点亮PC13连接的灯
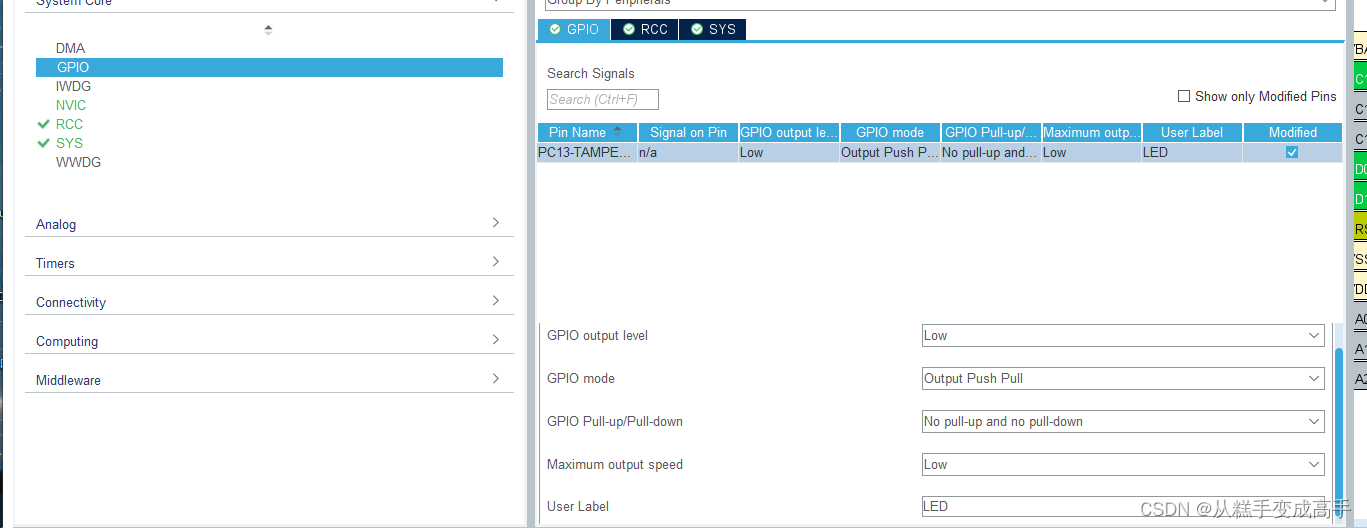
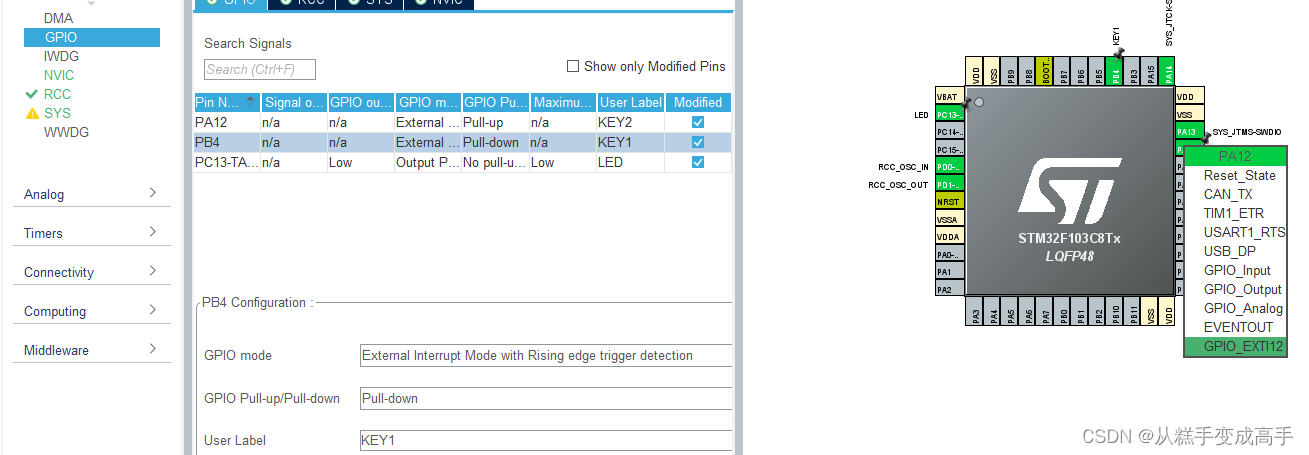
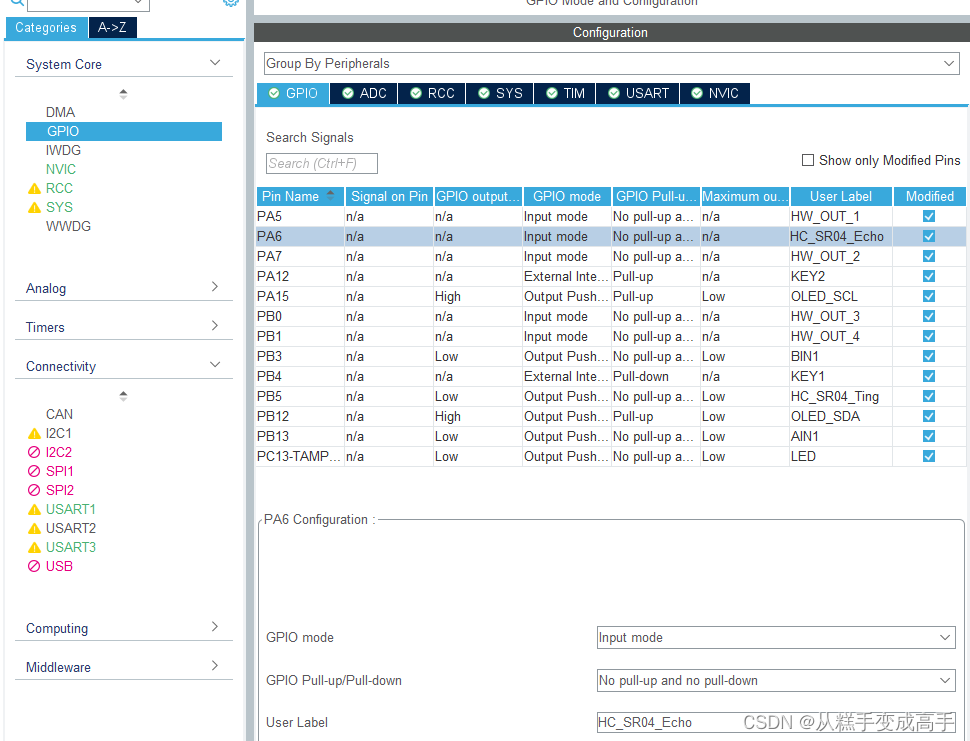
打开STM32CubeMX软件,pc13设置为输出模式
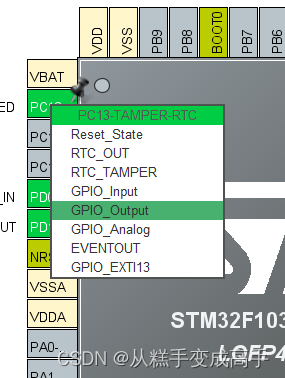
然后按照这样配置,user label 设置成这个IO口代表名字即可
点击这个生成代码

STM32CubeMX给我们每一个引脚都在main.h里面设置以宏的形式,我们写的代码要放在BEGIN 和END之间。
添加以下代码
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
HAL_Delay(100);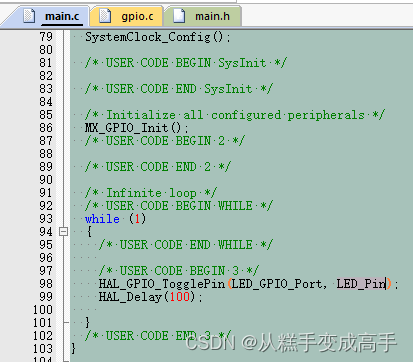

编译结束0警告0错误说明我们的格式没出现错误,表示我们成功使用STM32CubeMX配置点亮LED灯。
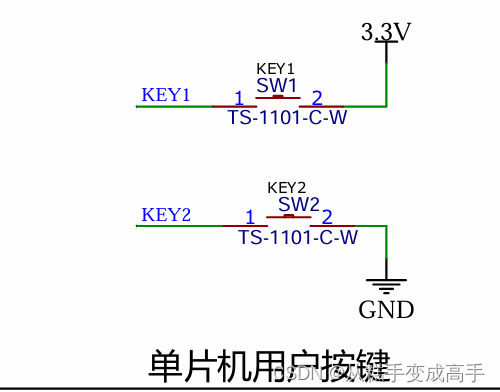
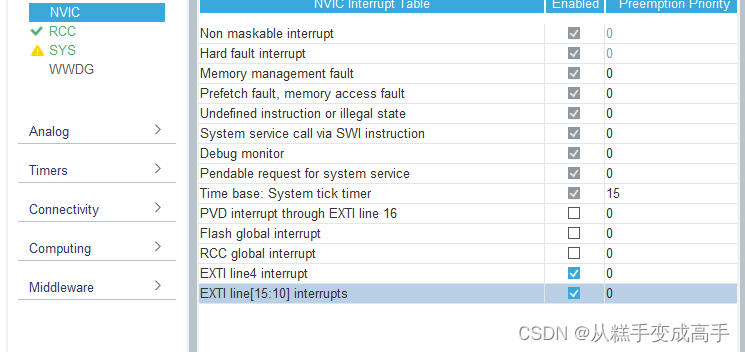
二、按键控制
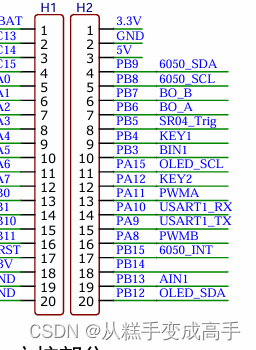
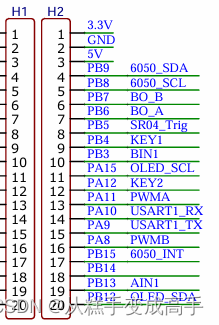
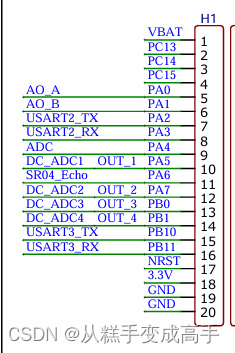
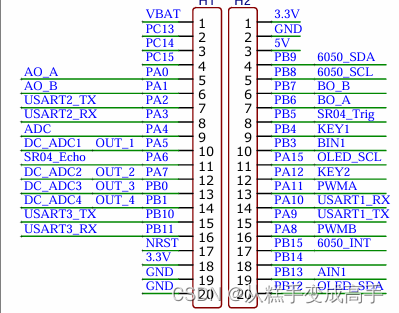
原理图
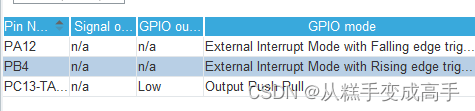
KEY1--PB4 上升沿触发 下拉输入
KEY2--PA12 下降沿触发 上拉输入
PB4和PA12按照这样进行配置
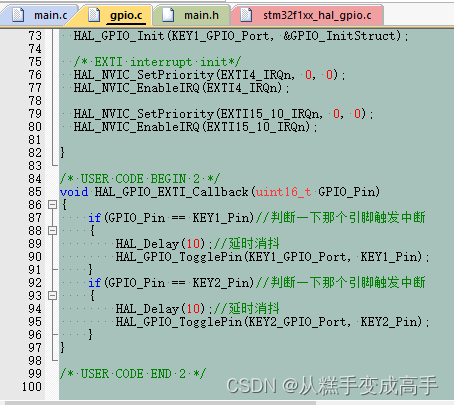
使能外部中断,生成代码
重定义中断回调函数,并把点亮LED灯的代码给注释掉。
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == KEY1_Pin)//判断一下那个引脚触发中断
{
HAL_Delay(10);//延时消抖
HAL_GPIO_TogglePin(KEY1_GPIO_Port, KEY1_Pin);
}
if(GPIO_Pin == KEY2_Pin)//判断一下那个引脚触发中断
{
HAL_Delay(10);//延时消抖
HAL_GPIO_TogglePin(KEY2_GPIO_Port, KEY2_Pin);
}
}
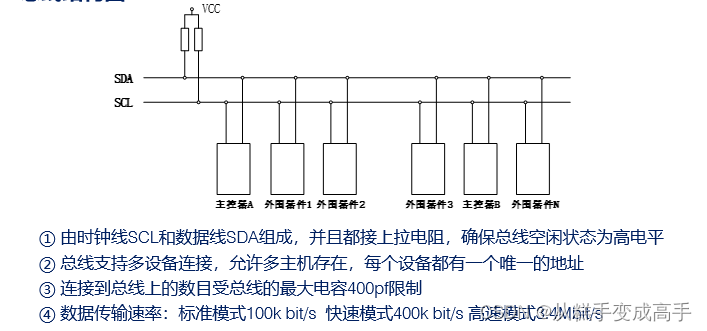
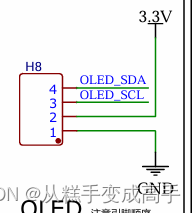
三、OLED使用
本实验使用的是优信电子--0.96寸OLED显示液晶屏模块 IIC液晶屏 四引脚
把中景园电子0.96OLED显示屏_STM32F103C8_IIC_V1.0文件里面的OLED文件添加到到我们的工程分组里面并修改一些错误。

把上面这些部分换成下面的样式
#define OLED_SCLK_Clr() HAL_GPIO_WritePin(OLED_SCL_GPIO_Port, OLED_SCL_Pin, GPIO_PIN_RESET)//设置SCL低电平
#define OLED_SCLK_Set() HAL_GPIO_WritePin(OLED_SCL_GPIO_Port, OLED_SCL_Pin, GPIO_PIN_SET)//设置SCL高电平
#define OLED_SDIN_Clr() HAL_GPIO_WritePin(OLED_SDA_GPIO_Port,OLED_SDA_Pin,GPIO_PIN_RESET)//设置SDA低电平
#define OLED_SDIN_Set() HAL_GPIO_WritePin(OLED_SDA_GPIO_Port,OLED_SDA_Pin,GPIO_PIN_SET)//设置SDA高电平SDA-PB12 SCL-PA15
初始化IO口为输出模式--上拉输出模式(这个OLED是IIC协议,模拟IIC控制OLED的)
在main.c中加入以下代码 测试OLED显示屏
OLED_Init(); //初始化OLED
OLED_Clear();
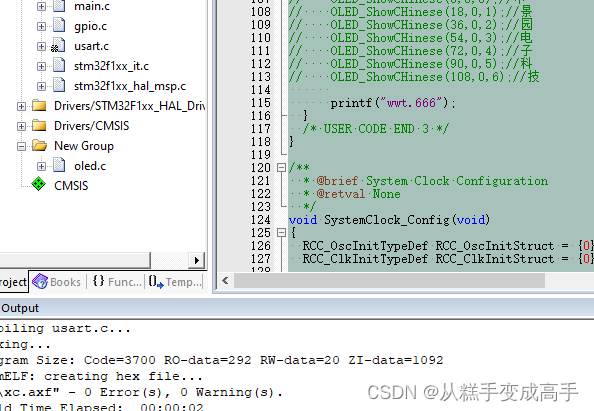
OLED_ShowCHinese(0,0,0);//中
OLED_ShowCHinese(18,0,1);//景
OLED_ShowCHinese(36,0,2);//园
OLED_ShowCHinese(54,0,3);//电
OLED_ShowCHinese(72,0,4);//子
OLED_ShowCHinese(90,0,5);//科
OLED_ShowCHinese(108,0,6);//技四、串口实验
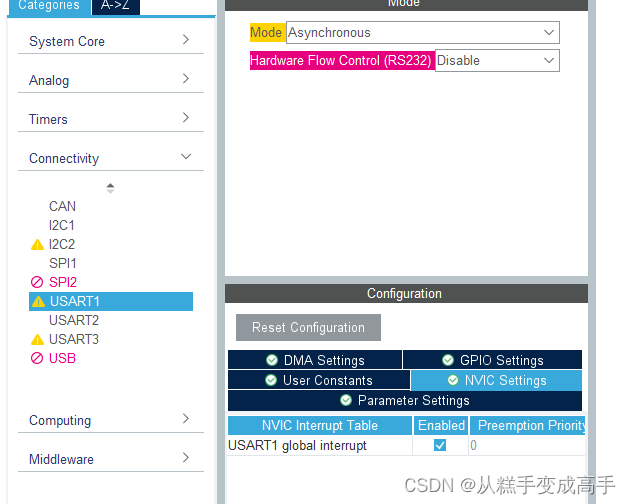
用cubemx软件配置,选择USART1 Mode配置为asynchronous(异步)其他的不用修改,生成代码。
在usart.c中重定向printf
/**
* @brief 重定向printf (重定向fputc),
使用时候记得勾选上魔法棒->Target->UseMicro LIB
可能需要在C文件加typedef struct __FILE FILE;
包含这个文件#include "stdio.h"
* @param
* @return
*/
int fputc(int ch,FILE *stream)
{
HAL_UART_Transmit(&huart1,( uint8_t *)&ch,1,0xFFFF);
return ch;
}如果有报错添加 typedef struct __FILE FILE;
在main.c中添加 #include "stdio.h"
用printf函数测试一下是否有误
五、PWM控制电机
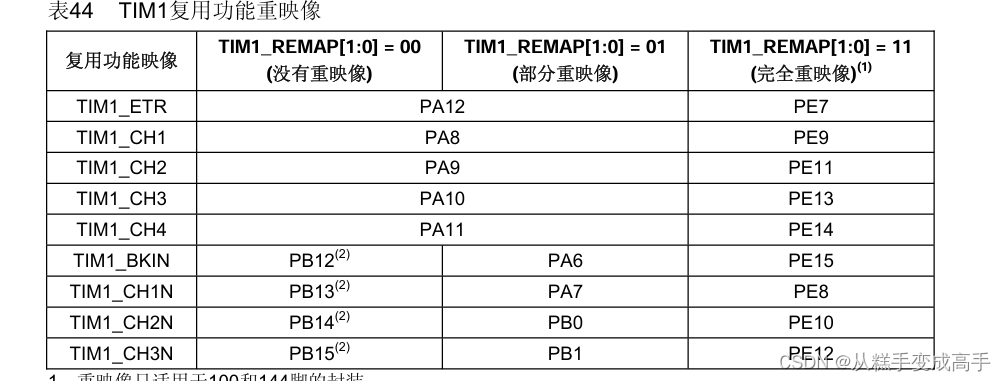
PWMA--PA11 PA11、PA8设置成pwm输出
PWMB--PA8

由参考手册可知TIM1_CH1和TIM1_CH4复用功能重映射到PA8和PA11
cudemx软件配置生成代码
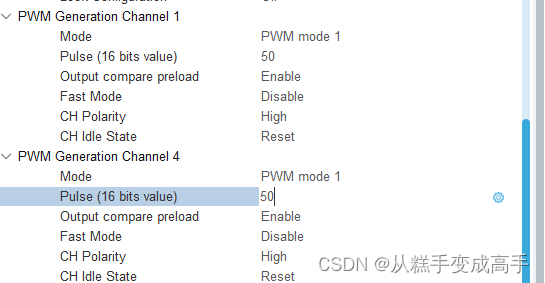
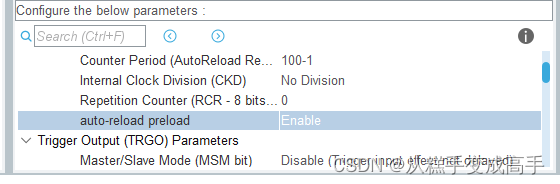
预分频值设置为1440-1 自动重装载值设置为100-1
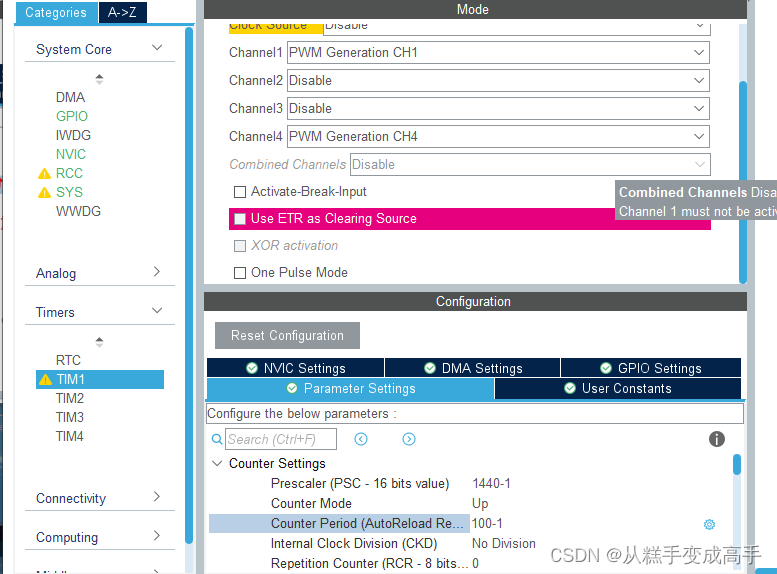
脉冲时长设置为50(也就是占空比为50%)
因为Cude在生成代码时,有很多外设初始化完成后默认是关闭的。需要我们手动开启。

HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);//开启定时器1 通道1 PWM输出
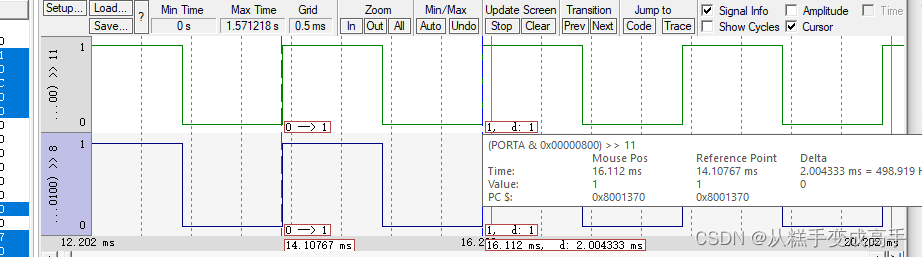
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4);//开启定时器1 通道4 PWM输出启动软件仿真
下图中d表示的是一个周期的时间2.00433ms(0.002S)那么频率为1/0.002 = 500HZ
使用这个修改占空比
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 40);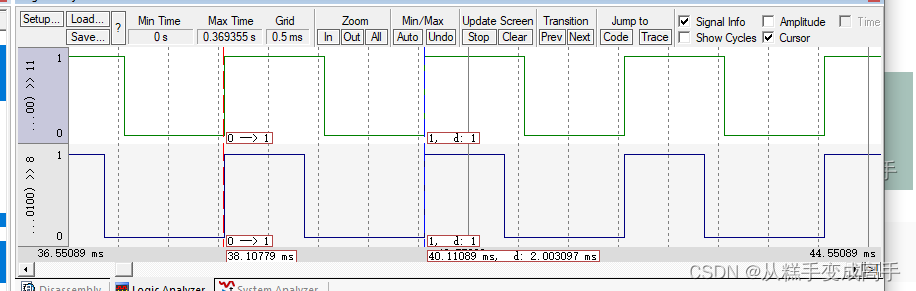
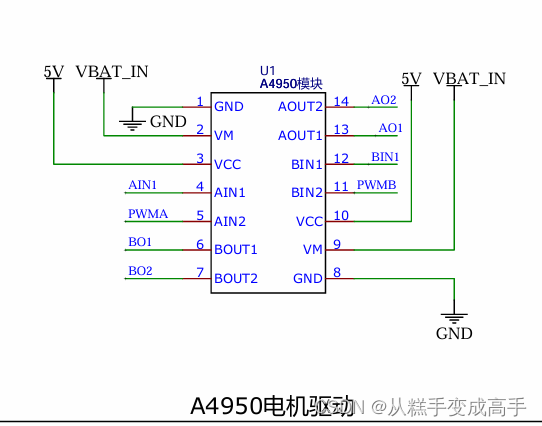
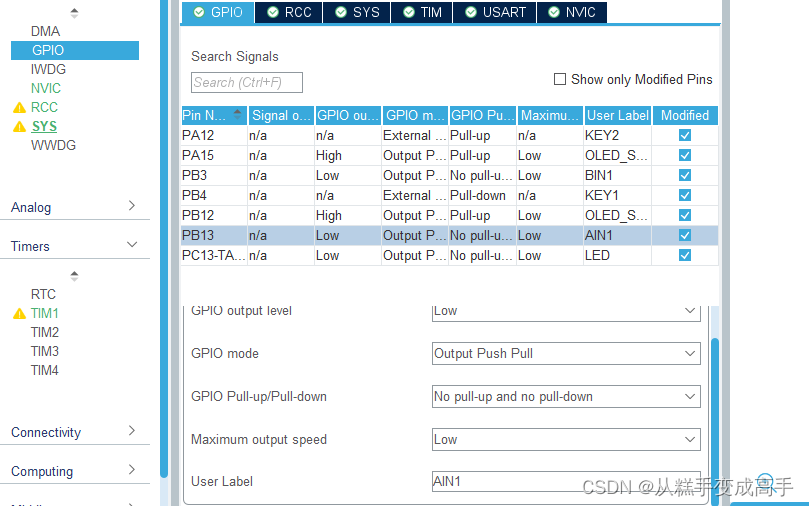
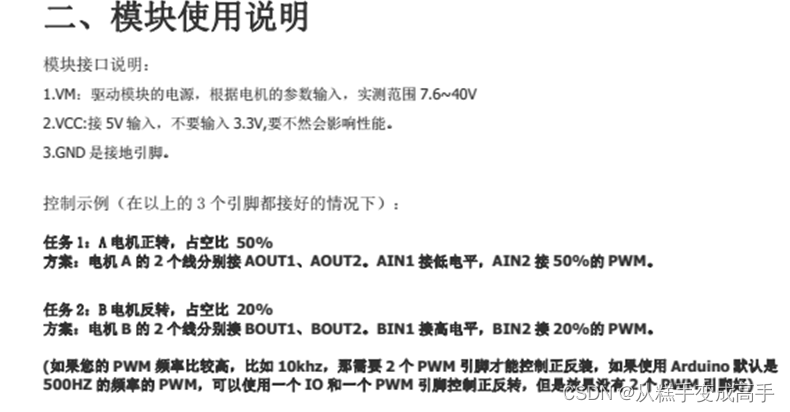
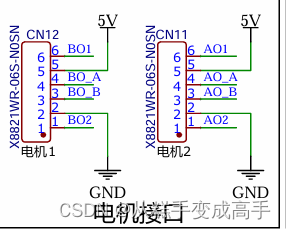
六、电机驱动和PWM
实验所用电机为A4950
PA11--PWMA、PA8--PWMB 设置成pwm输出,上一步已经设置好了。
PB3--BIN1 输出模式
PB13--AIN1 输出模式
CudeMx配置生成代码
创建motor.c和.h文件
小车正方向走电平为低电平反方向走电平为高电平(由A4950电机驱动模块使用手册可知正转接低电平)
motor.c
#include "motor.h"
#include "tim.h"
/*******************
* @brief 设置两个电机的转速和方向
* @param motor1:输入1-100,对应控制电机正方向速度在1%-100%、输入-1-(-100)对应控制电机反方向速度在1%-100%
motor2 原理一样
* @return 无
*
*******************/
void Motor_Set(int motor1, int motor2)
{
//根据参数正负 设置选择方向
if(motor1 < 0) BIN1_SET;
else BIN1_RESET;
if(motor2 < 0) AIN1_SET;
else AIN1_RESET;
if(motor1 < 0)
{
if(motor1 < -99) motor1 = -99; //超过PWM幅值
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, (100+motor1));//修改定时器1 通道1 Pulse改变占空比
}
else
{
if(motor1 > 99) motor1 = 99;
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, motor1);//修改定时器1 通道1 Pulse改变占空比
}
if(motor2 < 0)
{
if(motor2 < -99) motor2 = -99;//超过PWM幅值
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, (100+motor2));//修改定时器1 通道4 Pulse改变占空比
}
else
{
if(motor2 > 99) motor2 = 99;
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, motor2);//修改定时器1 通道4 Pulse改变占空比
}
}motor.h
#ifndef MOTOR_H_
#define MOTOR_H_
#include "main.h"
#define AIN1_RESET HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_RESET)//设置AIN1 PB13为低电平
#define AIN1_SET HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_SET)//设置AIN1 PB13为高电平
#define BIN1_RESET HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET)//设置BIN1 PB3为低电平
#define BIN1_SET HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET)//设置BIN1 PB3为高电平
void Motor_Set(int motor1, int motor2);
#endif
进行测试
HAL_Delay(500);
Motor_Set(0,0);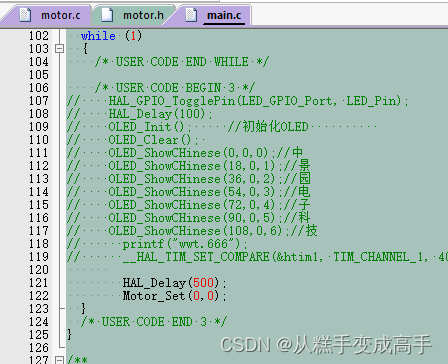
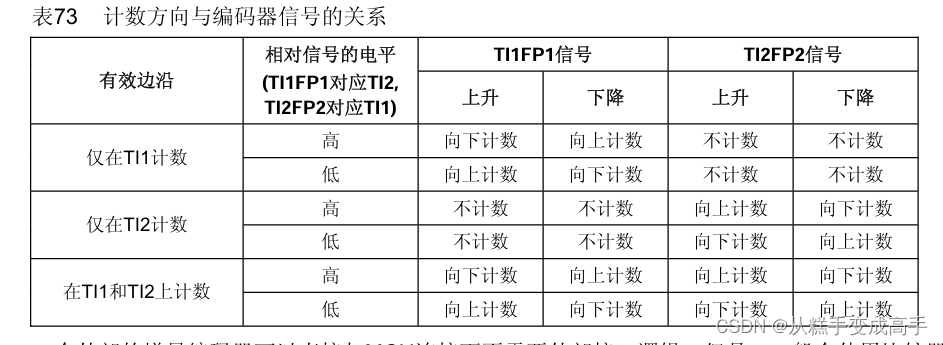
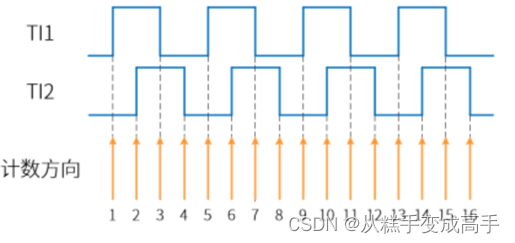
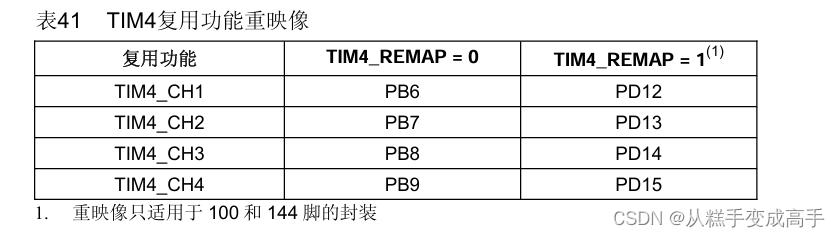
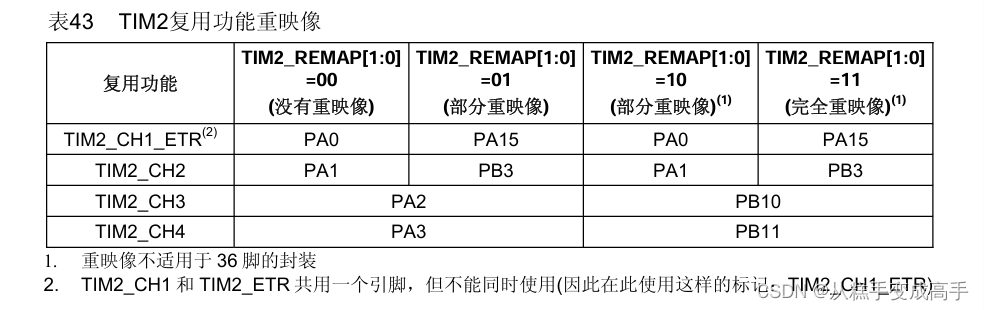
七、编码器测速
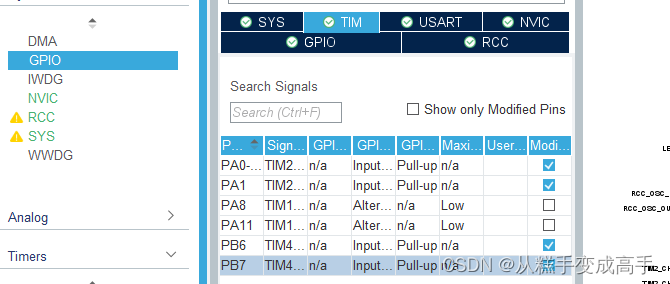
这里我们选择TI1和TI2上计数(四倍频)
由原理图可知AO_A,AO_B以及BO_A,BO_B所连引脚分别为PA0、PA1、PB6、PB7

设置CubeMx
1、设置编码器模式 2、自动重装载值设置为65535 3、TI1 TI2都计数
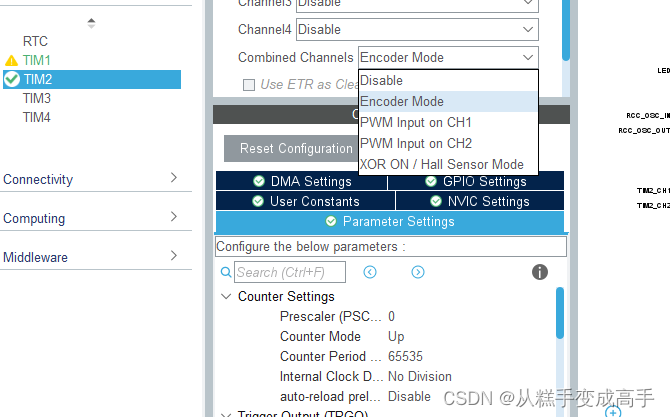
3、TI1 TI2都计数 4、两个滤波器设置为6
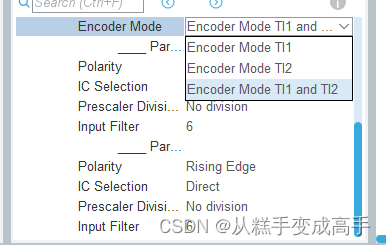
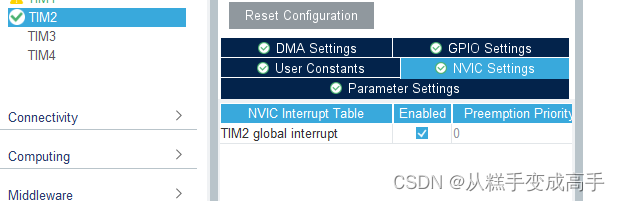
5、打开全局中断 同理设置TI4
6、GPIO引脚设置为上拉 生成代码
定时器中断定时测速
使用定时器1、2ms进入一次中断,使用中断回调函数
1、设置内部时钟源
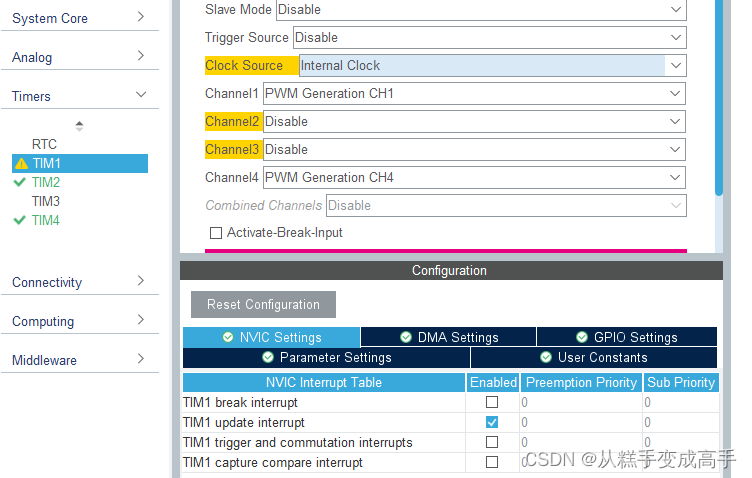
2、使能自动重装载
3、开启更新中断
开启定时器以及中断
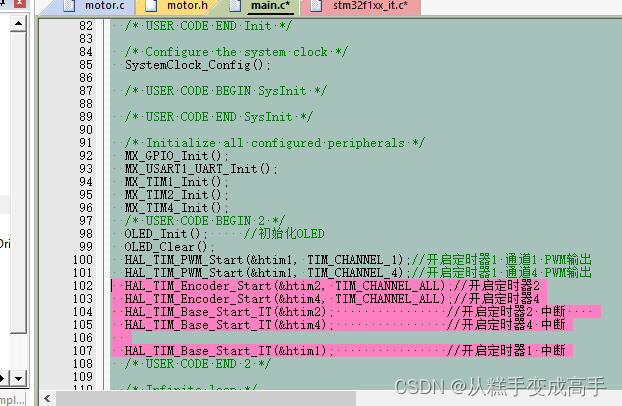
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);//开启定时器2
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL);//开启定时器4
HAL_TIM_Base_Start_IT(&htim2); //开启定时器2 中断
HAL_TIM_Base_Start_IT(&htim4); //开启定时器4 中断
HAL_TIM_Base_Start_IT(&htim1); //开启定时器1 中断定义两个变量保存编码器计数数值以及两个变量表示速度
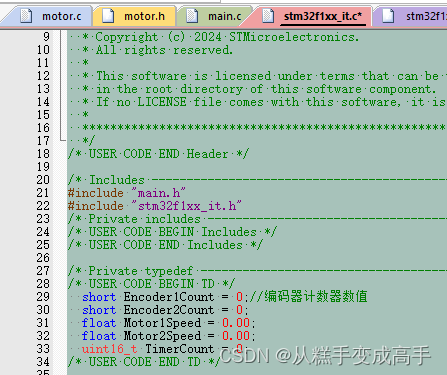
short Encoder1Count = 0;//编码器计数器数值
short Encoder2Count = 0;
float Motor1Speed = 0.00;
float Motor2Speed = 0.00;
uint16_t TimerCount = 0;定时器溢出时间计算公式
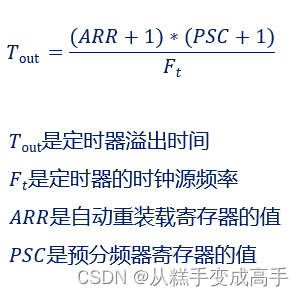
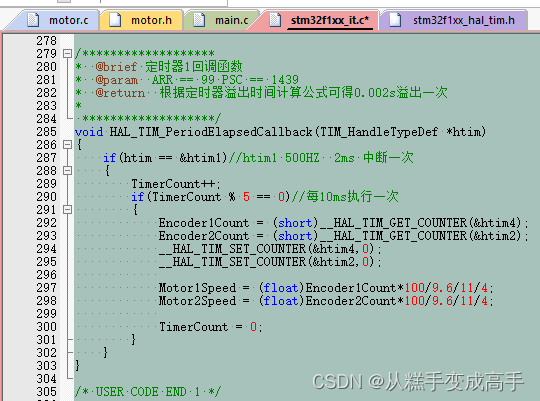
/*******************
* @brief 定时器1回调函数
* @param ARR == 99 PSC == 1439
* @return 根据定时器溢出时间计算公式可得0.002s溢出一次
*
*******************/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim1)//htim1 500HZ 2ms 中断一次
{
TimerCount++;
if(TimerCount % 5 == 0)//每10ms执行一次
{
Encoder1Count = (short)__HAL_TIM_GET_COUNTER(&htim4);
Encoder2Count = (short)__HAL_TIM_GET_COUNTER(&htim2);
__HAL_TIM_SET_COUNTER(&htim4,0);
__HAL_TIM_SET_COUNTER(&htim2,0);
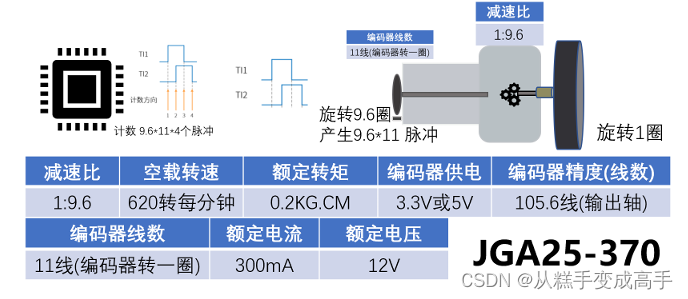
Motor1Speed = (float)Encoder1Count*100/9.6/11/4;
Motor2Speed = (float)Encoder2Count*100/9.6/11/4;
TimerCount = 0;
}
}
}在main.c声明
extern float Motor1Speed ;
extern float Motor2Speed ;在main.c中输出速度即可
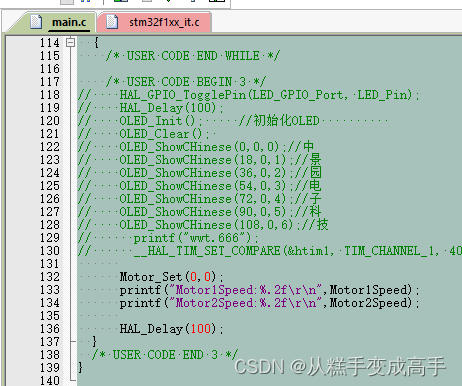
printf("Motor1Speed:%.2f\r\n",Motor1Speed);
printf("Motor2Speed:%.2f\r\n",Motor2Speed);八、PID速度控制
【PID算法 - 从入门到实战!】https://www.bilibili.com/video/BV1iP411x71X?vd_source=20e2569dfbc86cd3178a9555d0dd7ac2

使用匿名上位机曲线显示速度波形方便观察数据
niming.c
#include "niming.h"
#include "main.h"
#include "usart.h"
uint8_t data_to_send[100];
//通过F1帧发送4个uint16类型的数据
void ANO_DT_Send_F1(uint16_t _a, uint16_t _b, uint16_t _c, uint16_t _d)
{
uint8_t _cnt = 0; //计数值
uint8_t sumcheck = 0; //和校验
uint8_t addcheck = 0; //附加和校验
uint8_t i = 0;
data_to_send[_cnt++] = 0xAA;//帧头
data_to_send[_cnt++] = 0xFF;//目标地址
data_to_send[_cnt++] = 0xF1;//功能码
data_to_send[_cnt++] = 8; //数据长度
//单片机为小端模式-低地址存放低位数据,匿名上位机要求先发低位数据,所以先发低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE0(_d);
data_to_send[_cnt++] = BYTE1(_d);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];//和校验
addcheck += sumcheck;//附加校验
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//这里是串口发送函数
}
//,通过F2帧发送4个int16类型的数据
void ANO_DT_Send_F2(int16_t _a, int16_t _b, int16_t _c, int16_t _d) //F2帧 4个 int16 参数
{
uint8_t _cnt = 0;
uint8_t sumcheck = 0; //和校验
uint8_t addcheck = 0; //附加和校验
uint8_t i=0;
data_to_send[_cnt++] = 0xAA;
data_to_send[_cnt++] = 0xFF;
data_to_send[_cnt++] = 0xF2;
data_to_send[_cnt++] = 8; //数据长度
//单片机为小端模式-低地址存放低位数据,匿名上位机要求先发低位数据,所以先发低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE0(_d);
data_to_send[_cnt++] = BYTE1(_d);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];
addcheck += sumcheck;
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//这里是串口发送函数
}
//通过F3帧发送2个int16类型和1个int32类型的数据
void ANO_DT_Send_F3(int16_t _a, int16_t _b, int32_t _c ) //F3帧 2个 int16 参数 1个 int32 参数
{
uint8_t _cnt = 0;
uint8_t sumcheck = 0; //和校验
uint8_t addcheck = 0; //附加和校验
uint8_t i=0;
data_to_send[_cnt++] = 0xAA;
data_to_send[_cnt++] = 0xFF;
data_to_send[_cnt++] = 0xF3;
data_to_send[_cnt++] = 8; //数据长度
//单片机为小端模式-低地址存放低位数据,匿名上位机要求先发低位数据,所以先发低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE2(_c);
data_to_send[_cnt++] = BYTE3(_c);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];
addcheck += sumcheck;
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//这里是串口发送函数
}
niming.h
#ifndef NIMING_H
#define NIMING_H
#include "main.h"
//需要发送16位,32位数据,对数据拆分,之后每次发送单个字节
//拆分过程:对变量dwTemp 去地址然后将其转化成char类型指针,最后再取出指针所指向的内容
#define BYTE0(dwTemp) (*(char *)(&dwTemp))
#define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1))
#define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2))
#define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3))
void ANO_DT_Send_F1(uint16_t, uint16_t _b, uint16_t _c, uint16_t _d);
void ANO_DT_Send_F2(int16_t _a, int16_t _b, int16_t _c, int16_t _d);
void ANO_DT_Send_F3(int16_t _a, int16_t _b, int32_t _c );
#endif
添加测试代码
if(Motor1Speed>3.1) Motor1Pwm--;
if(Motor1Speed<2.9) Motor1Pwm++;
if(Motor2Speed>3.1) Motor2Pwm--;
if(Motor2Speed<2.9) Motor2Pwm++;
Motor_Set(Motor1Pwm,Motor2Pwm);
printf("Motor1Speed:%.2f Motor1Pwm:%d\r\n",Motor1Speed,Motor1Pwm);
printf("Motor2Speed:%.2f Motor2Pwm:%d\r\n",Motor2Speed,Motor2Pwm);
HAL_Delay(10);
//电机速度等信息发送到上位机
//注意上位机不支持浮点数,所以要乘100
ANO_DT_Send_F2(Motor1Speed*100, 3.0*100,Motor2Speed*100,3.0*100);PID代码
pid.c
#include "pid.h"
//定义一个结构体类型变量
tpid pidMotor1Speed;
//给结构体类型变量赋初值
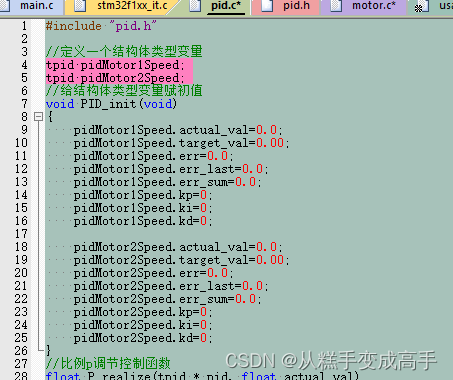
void PID_init(void)
{
pidMotor1Speed.actual_val = 0.0;
pidMotor1Speed.target_val = 0.00;
pidMotor1Speed.err = 0.0;
pidMotor1Speed.err_last = 0.0;
pidMotor1Speed.err_sum = 0.0;
pidMotor1Speed.kp = 0;
pidMotor1Speed.ki = 0;
pidMotor1Speed.kd = 0;
}
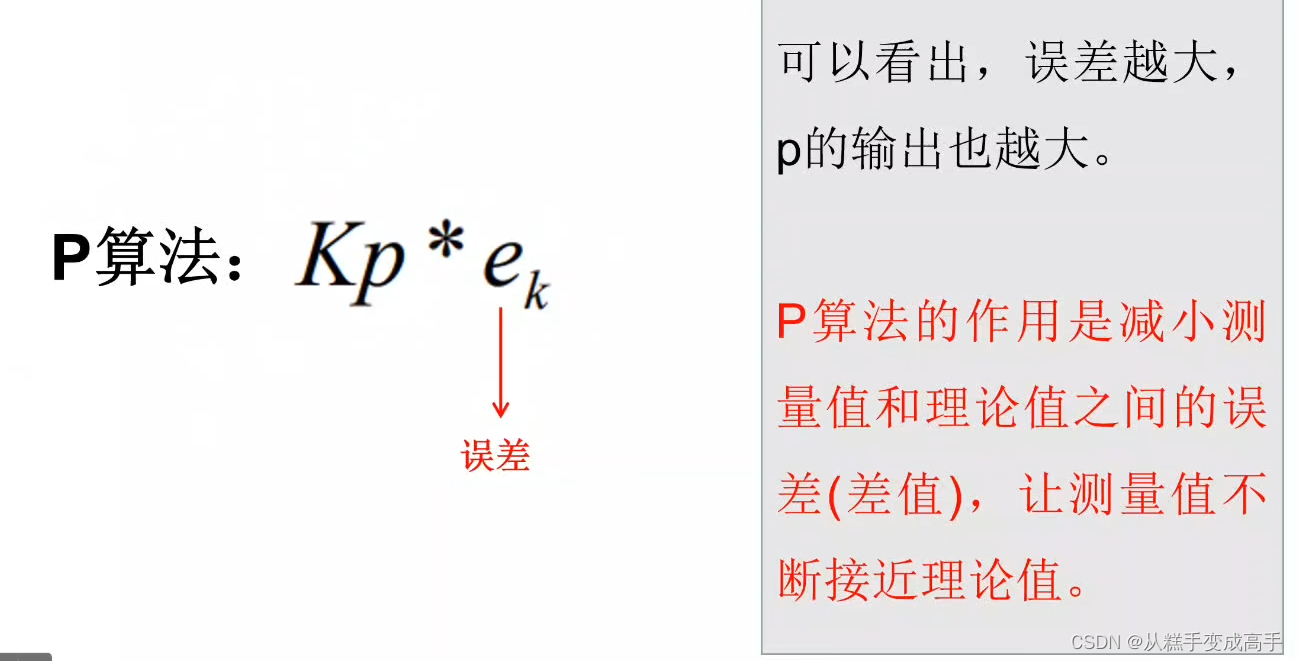
//比例p调节控制函数
float P_realize(tpid * pid, float actual_val)
{
pid->actual_val = actual_val; //传递真实值
pid->err = pid->target_val - pid->actual_val; //当前误差=目标值-真实值
//比例控制调节 输出=Kp*当前误差
pid->actual_val = pid->kp*pid->err;
return pid->actual_val;
}
//比例P 积分I 控制函数
float PI_realize(tpid * pid, float actual_val)
{
pid->actual_val = actual_val; //传递真实值
pid->err = pid->target_val - pid->actual_val; //当前误差=目标值-真实值
pid->err_sum += pid->err;//误差累计值 = 当前误差累计和
//使用PI控制 输出=Kp*当前误差+Ki*误差累计值
pid->actual_val = pid->kp*pid->err + pid->ki*pid->err_sum;
return pid->actual_val;
}
// PID控制函数
float PID_realize(tpid * pid, float actual_val)
{
pid->actual_val = actual_val; //传递真实值
pid->err = pid->target_val - pid->actual_val; //当前误差=目标值-真实值
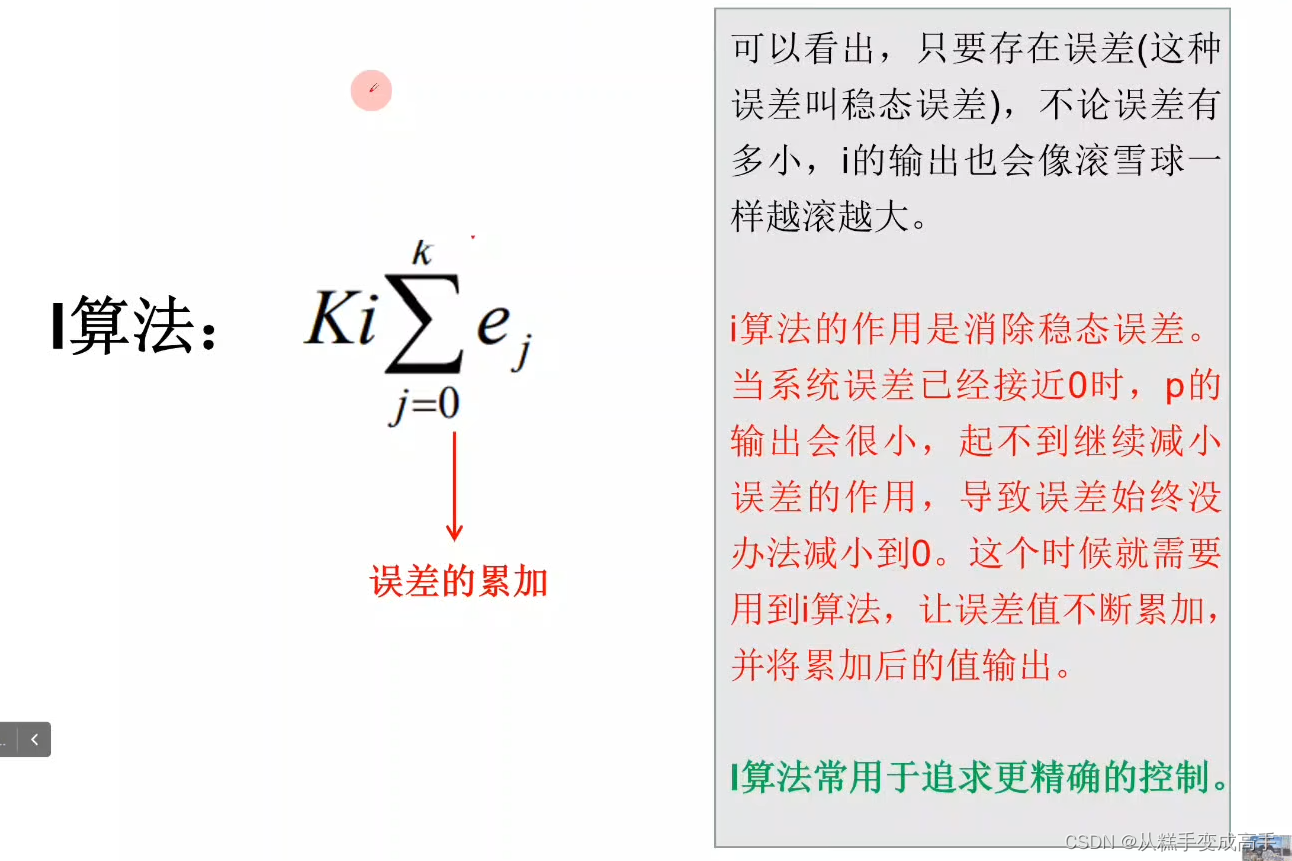
pid->err_sum += pid->err;//误差累计值 = 当前误差累计和
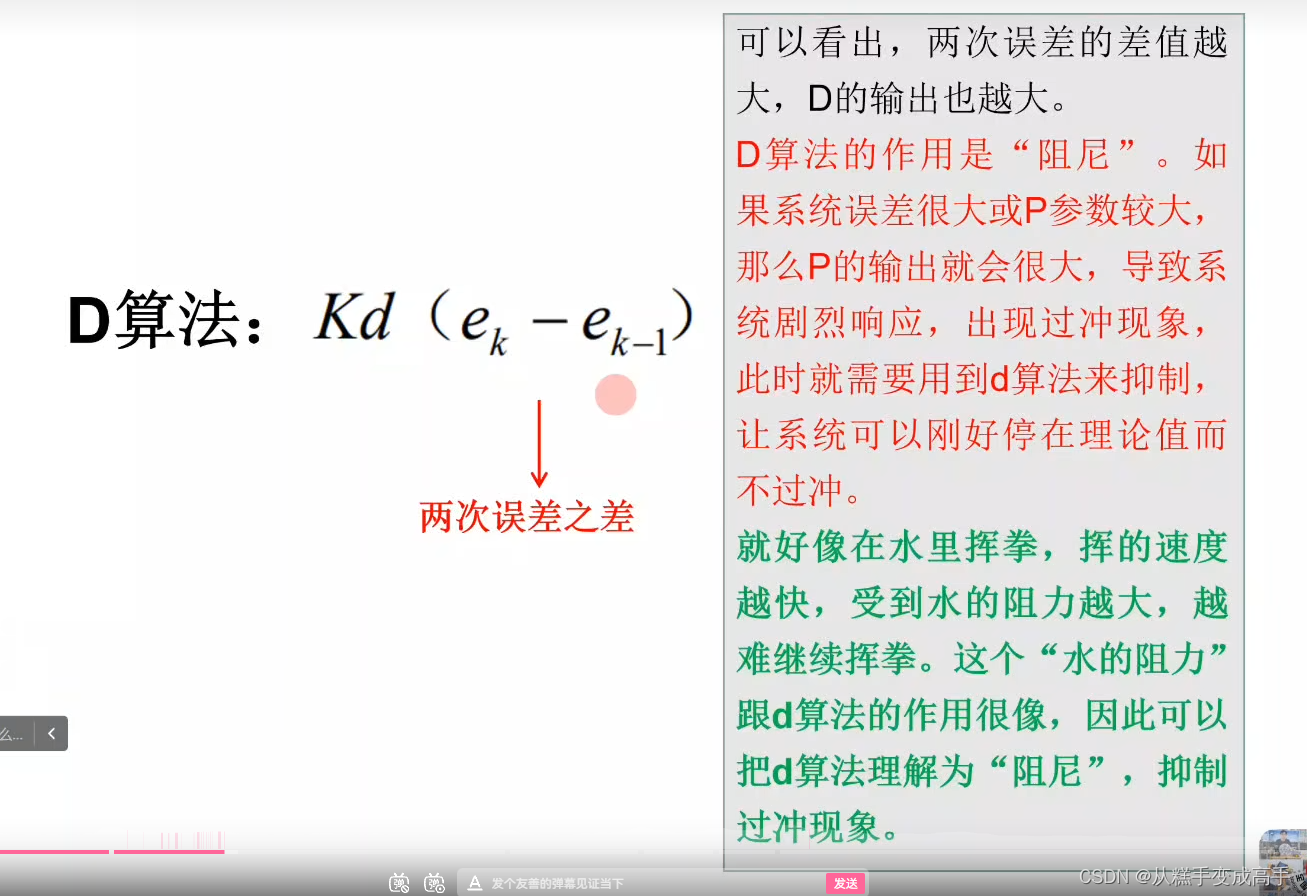
//使用PID控制 输出 = Kp*当前误差 + Ki*误差累计值 + Kd*(当前误差-上次误差)
pid->actual_val = pid->kp*pid->err + pid->ki*pid->err_sum + pid->kd*(pid->err - pid->err_last);
//保存上次误差: 这次误差赋值给上次误差
pid->err_last = pid->err;
return pid->actual_val;
}
pid.h
#ifndef __PID_H
#define __PID_H
//声明一个结构体类型
typedef struct
{
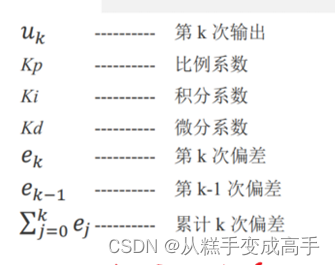
float target_val;//目标值
float actual_val;//实际值
float err; //当前偏差
float err_last; //上次偏差
float err_sum; //误差累计值
float kp,ki,kd; //比例 积分 微分系数
} tpid;
//声明函数
void PID_init(void);
float P_realize(tpid * pid, float actual_val);
float PI_realize(tpid * pid, float actual_val);
float PID_realize(tpid * pid, float actual_val);
#endif
然后在main函数中调用PID_init()函数,别忘把头文件给包含进去。
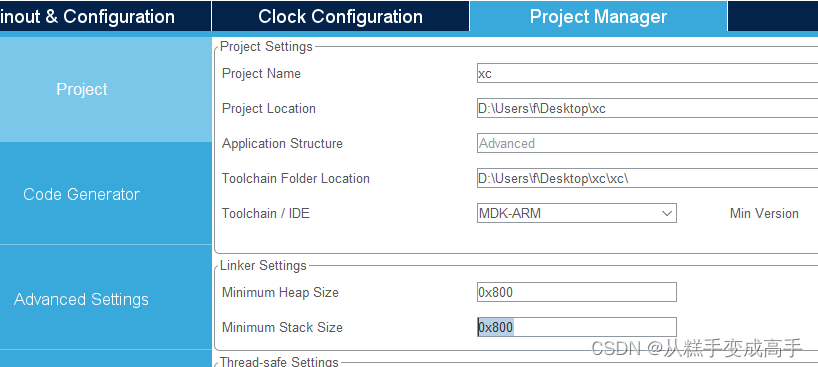
使用cJSON方便调参
1、调大堆栈都改为0x800
2、开启串口一的全局中断
__HAL_UART_ENABLE_IT(&huart1,UART_IT_RXNE);
//开启串口1接收中断中断回调函数
uint8_t Usart1_ReadBuf[256]; //串口1 缓冲数组
uint8_t Usart1_ReadCount = 0; //串口1 接收字节计数
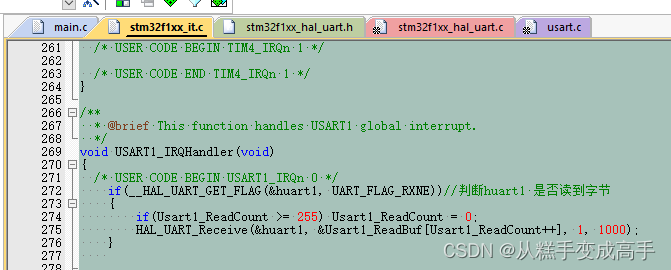
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_RXNE))//判断huart1 是否读到字节
{
if(Usart1_ReadCount >= 255) Usart1_ReadCount = 0;
HAL_UART_Receive(&huart1,&Usart1_ReadBuf[Usart1_ReadCount++],1,1000);
}编写函数用于判断串口是否发送完一帧数据
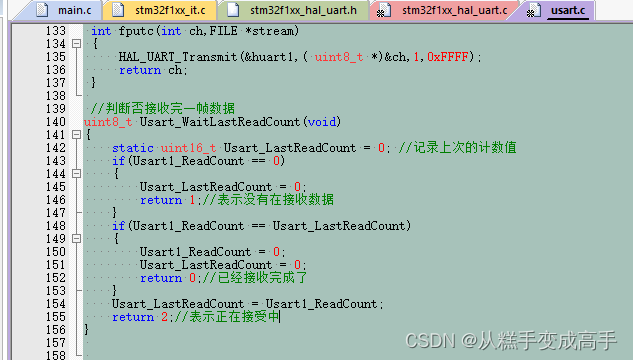
//判断否接收完一帧数据
uint8_t Usart_WaitReasFinish(void)
{
static uint16_t Usart_LastReadCount = 0; //记录上次的计数值
if(Usart1_ReadCount == 0)
{
Usart_LastReadCount = 0;
return 1;//表示没有在接收数据
}
if(Usart1_ReadCount == Usart_LastReadCount)
{
Usart1_ReadCount = 0;
Usart_LastReadCount = 0;
return 0;//已经接收完成了
}
Usart_LastReadCount = Usart1_ReadCount;
return 2;//表示正在接受中
}把cJSON的.c.h放到工程中去,并在main函数中加入以下代码
#include "cJSON.h"
#include <string.h>cJSON *cJsonData ,*cJsonVlaue; if(Usart_WaitReasFinish() == 0)//是否接收完毕
{
cJsonData = cJSON_Parse((const char *)Usart1_ReadBuf);
if(cJSON_GetObjectItem(cJsonData,"p") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"p");
p = cJsonVlaue->valuedouble;
pidMotor1Speed.kp = p;
}
if(cJSON_GetObjectItem(cJsonData,"i") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"i");
i = cJsonVlaue->valuedouble;
pidMotor1Speed.ki = i;
}
if(cJSON_GetObjectItem(cJsonData,"d") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"d");
d = cJsonVlaue->valuedouble;
pidMotor1Speed.kd = d;
}
if(cJSON_GetObjectItem(cJsonData,"a") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"a");
a = cJsonVlaue->valuedouble;
pidMotor1Speed.target_val =a;
}
if(cJsonData != NULL)
{
cJSON_Delete(cJsonData);//释放空间、但是不能删除cJsonVlaue不然会 出现异常错误
}
memset(Usart1_ReadBuf,0,255);//清空接收buf,注意这里不能使用strlen
}
printf("P:%.3f I:%.3f D:%.3f A:%.3f\r\n",p,i,d,a);九、PID整定方法
把PID控制函数放到中断里面循环调用定时执行
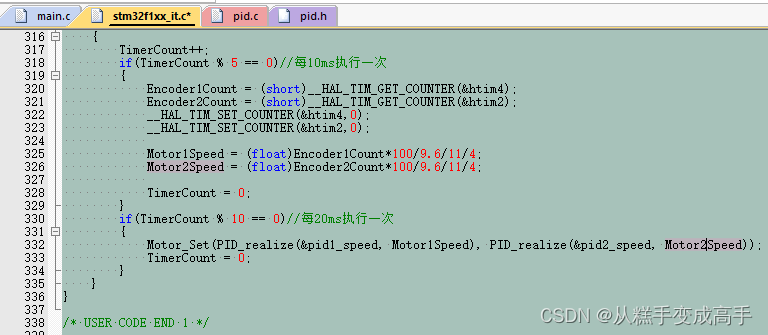
if(TimerCount % 10 == 0)//每20ms执行一次
{
Motor_Set(PID_realize(&pid1_speed, Motor1Speed), PID_realize(&pid2_speed, Motor2Speed));
TimerCount = 0;
}
//定义一个结构体类型变量
tpid pidMotor1Speed;
tpid pidMotor2Speed;
//给结构体类型变量赋初值
void PID_init(void)
{
pidMotor1Speed.actual_val=0.0;
pidMotor1Speed.target_val=0.00;
pidMotor1Speed.err=0.0;
pidMotor1Speed.err_last=0.0;
pidMotor1Speed.err_sum=0.0;
pidMotor1Speed.kp=0;
pidMotor1Speed.ki=0;
pidMotor1Speed.kd=0;
pidMotor2Speed.actual_val=0.0;
pidMotor2Speed.target_val=0.00;
pidMotor2Speed.err=0.0;
pidMotor2Speed.err_last=0.0;
pidMotor2Speed.err_sum=0.0;
pidMotor2Speed.kp=0;
pidMotor2Speed.ki=0;
pidMotor2Speed.kd=0;
}十、实现小车前后左右运动
//motorPidSetSpeed(1,2);//向右转弯
//motorPidSetSpeed(2,1);//向左转弯
//motorPidSetSpeed(1,1);//前进
//motorPidSetSpeed(-1,-1);//后退
//motorPidSetSpeed(0,0);//停止
//motorPidSetSpeed(-1,1);//右原地旋转
//motorPidSetSpeed(1,-1);//左原地旋转
void motorPidSetSpeed(float Motor1SetSpeed,float Motor2SetSpeed)
{
//改变电机PID参数的目标速度
pidMotor1Speed.target_val = Motor1SetSpeed;
pidMotor2Speed.target_val = Motor2SetSpeed;
//根据PID计算 输出作用于电机
Motor_Set(PID_realize(&pidMotor1Speed,Motor1Speed),PID_realize(&pidMotor2Speed,Motor2Speed));
}
//向前加速函数
void motorSpeedUp(void)
{
static float MotorSetSpeedUp = 0.5;//静态变量 函数结束变量不会销毁
if(MotorSetSpeedUp <= MAX_SPEED_UP) MotorSetSpeedUp += 0.5; //如果没有超过最大值就增加0.5
motorPidSetSpeed(MotorSetSpeedUp, MotorSetSpeedUp);//设置到电机
}
//向前减速函数
void motorSpeedCut(void)
{
static float MotorSetSpeedCut = 3;//静态变量 函数结束变量不会销毁
if(MotorSetSpeedCut >= 0.5) MotorSetSpeedCut -= 0.5;
motorPidSetSpeed(MotorSetSpeedCut, MotorSetSpeedCut);
}
在main函数写以下代码其中一个就能实现对小车的控制
//motorPidSetSpeed(1,2);//向右转弯
//motorPidSetSpeed(2,1);//向左转弯
//motorPidSetSpeed(1,1);//前进
//motorPidSetSpeed(-1,-1);//后退
//motorPidSetSpeed(0,0);//停止
//motorPidSetSpeed(-1,1);//右原地旋转
//motorPidSetSpeed(1,-1);//左原地旋转十一、OLED显示速度与历程
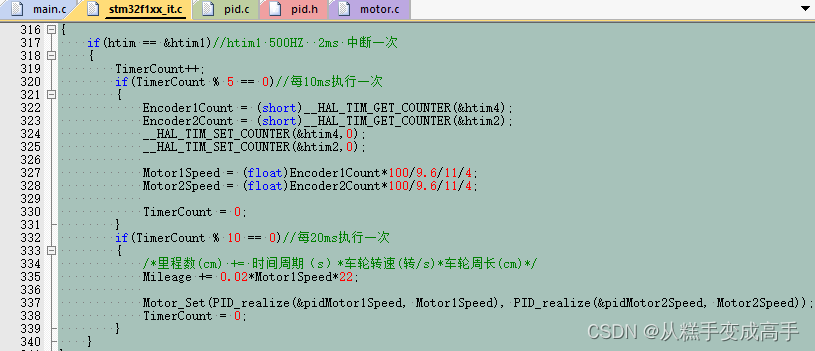
/*里程数(cm) += 时间周期(s)*车轮转速(转/s)*车轮周长(cm)*/
Mileage += 0.02*Motor1Speed*22;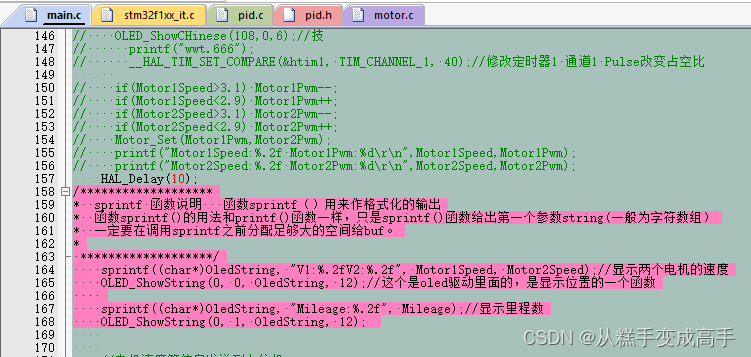
extern float Mileage;//里程数
uint8_t OledString[20];/*******************
* sprintf 函数说明 函数sprintf()用来作格式化的输出
* 函数sprintf()的用法和printf()函数一样,只是sprintf()函数给出第一个参数string(一般为字符数组)
* 一定要在调用sprintf之前分配足够大的空间给buf。
*
*******************/
sprintf((char*)OledString, "V1:%.2fV2:%.2f", Motor1Speed, Motor2Speed);//显示两个电机的速度
OLED_ShowString(0, 0, OledString, 12);//这个是oled驱动里面的,是显示位置的一个函数
sprintf((char*)OledString, "Mileage:%.2f", Mileage);//显示里程数
OLED_ShowString(0, 1, OledString, 12);
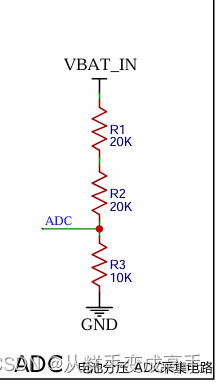
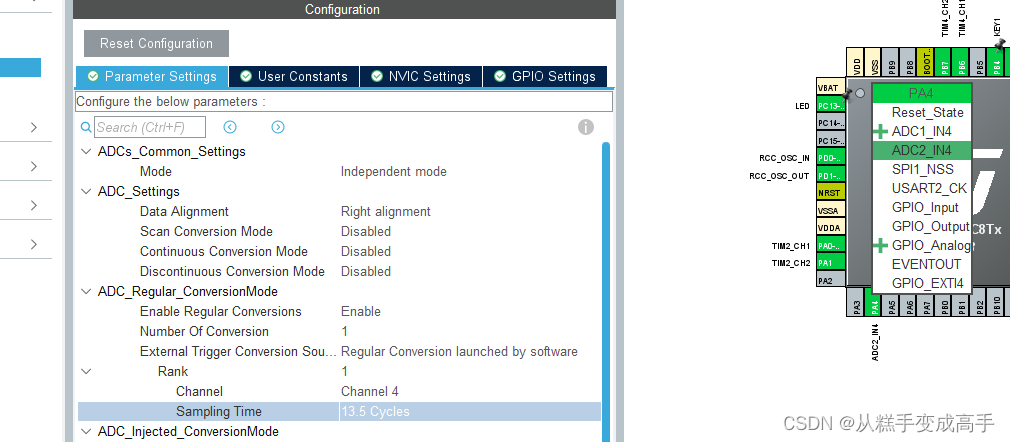
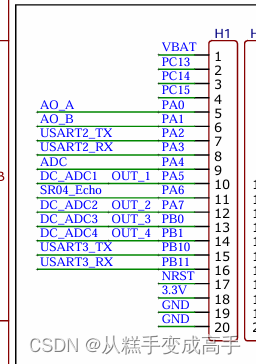
十二、OLED显示ADC采集电压
原理图
ADC连接PA4引脚
adc.c
别忘在adc.h中声明电池电压函数
/*******************
* @brief 电池电压测量函数
* @param
* @return 小车电池电压
*
*******************/
float adcGetBatteryVoltage(void)
{
HAL_ADC_Start(&hadc2);//启动ADC转化
if(HAL_OK == HAL_ADC_PollForConversion(&hadc2,50))//等待转化完成、超时时间50ms
return (float)HAL_ADC_GetValue(&hadc2)/4096*3.3*5;//计算电池电压
return -1;
}在main函数中加
sprintf((char*)OledString, "U:%.2fV", adcGetBatteryVoltage());
OLED_ShowString(0,2,OledString,12);十三、PID循迹
DO 高电平->有黑线 小灯灭
DO低电平->没有黑线 小灯亮
原理图
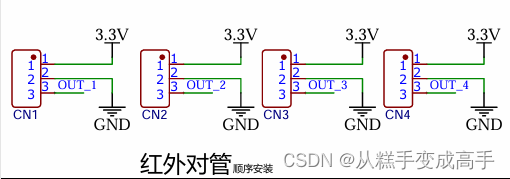
 OUT_1-PA5、OUT_2-PA7、OUT_3-PB0、OUT_4-PB1
OUT_1-PA5、OUT_2-PA7、OUT_3-PB0、OUT_4-PB1
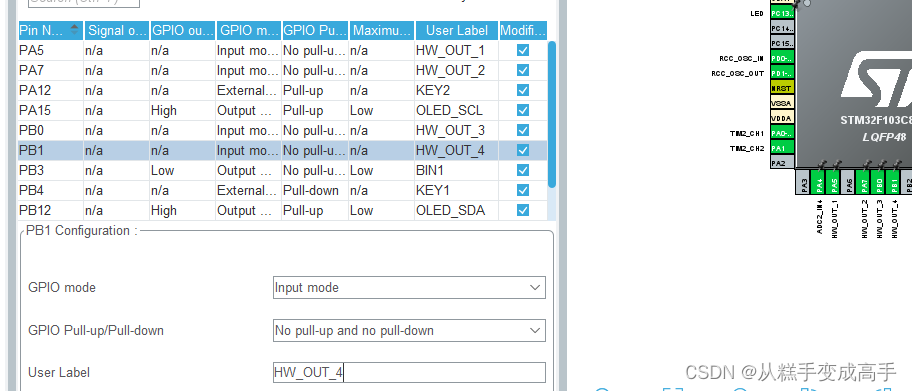
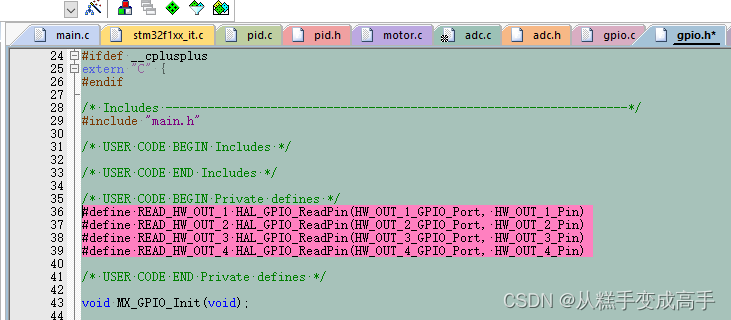
#define READ_HW_OUT_1 HAL_GPIO_ReadPin(HW_OUT_1_GPIO_Port, HW_OUT_1_Pin)
//读取红外对管连接的GPIO电平
#define READ_HW_OUT_2 HAL_GPIO_ReadPin(HW_OUT_2_GPIO_Port, HW_OUT_2_Pin)
#define READ_HW_OUT_3 HAL_GPIO_ReadPin(HW_OUT_3_GPIO_Port, HW_OUT_3_Pin)
#define READ_HW_OUT_4 HAL_GPIO_ReadPin(HW_OUT_4_GPIO_Port, HW_OUT_4_Pin)在pid.c中加一下代码
tPid pidHW_Tracking;//红外循迹的PID
pidHW_Tracking.actual_val = 0.0;
pidHW_Tracking.target_val = 0.00;//红外循迹PID 的目标值为0
pidHW_Tracking.err = 0.0;
pidHW_Tracking.err_last = 0.0;
pidHW_Tracking.err_sum = 0.0;
pidHW_Tracking.Kp = -1.50;
pidHW_Tracking.Ki = 0;
pidHW_Tracking.Kd = 0.80;在main函数中加一下代码
extern tPid pidHW_Tracking;//红外循迹的PID
uint8_t g_ucaHW_Read[4] = {0};//保存红外对管电平的数组
int8_t g_cThisState = 0;//这次状态
int8_t g_cLastState = 0; //上次状态
float g_fHW_PID_Out;//红外对管PID计算输出速度
float g_fHW_PID_Out1;//电机1的最后循迹PID控制速度
float g_fHW_PID_Out2;//电机2的最后循迹PID控制速度
g_ucaHW_Read[0] = READ_HW_OUT_1;//读取红外对管状态、这样相比于写在if里面更高效
g_ucaHW_Read[1] = READ_HW_OUT_2;
g_ucaHW_Read[2] = READ_HW_OUT_3;
g_ucaHW_Read[3] = READ_HW_OUT_4;
if(g_ucaHW_Read[0] == 0 && g_ucaHW_Read[1] == 0 && g_ucaHW_Read[2] == 0 && g_ucaHW_Read[3] == 0)
{
g_cThisState = 0;//前进
}
else if(g_ucaHW_Read[0] == 0 && g_ucaHW_Read[1] == 1 && g_ucaHW_Read[2] == 0 && g_ucaHW_Read[3] == 0)
{
g_cThisState = -1;//右转
}
else if(g_ucaHW_Read[0] == 1 && g_ucaHW_Read[1] == 0 && g_ucaHW_Read[2] == 0 && g_ucaHW_Read[3] == 0)
{
g_cThisState = -2;//快速右转
}
else if(g_ucaHW_Read[0] == 1 && g_ucaHW_Read[1] == 1 && g_ucaHW_Read[2] == 0 && g_ucaHW_Read[3] == 0)
{
g_cThisState = -3;//快速右转
}
else if(g_ucaHW_Read[0] == 0 && g_ucaHW_Read[1] == 0 && g_ucaHW_Read[2] == 1 && g_ucaHW_Read[3] == 0)
{
g_cThisState = 1;//左转
}
else if(g_ucaHW_Read[0] == 0 && g_ucaHW_Read[1] == 0 && g_ucaHW_Read[2] == 0 && g_ucaHW_Read[3] == 1)
{
g_cThisState = 2;//快速左转
}
else if(g_ucaHW_Read[0] == 0 && g_ucaHW_Read[1] == 0 && g_ucaHW_Read[2] == 1 && g_ucaHW_Read[3] == 1)
{
g_cThisState = 3;//快速左转
}
g_fHW_PID_OUT = PID_realize(&pidHW_Tracking, g_cThisState);//PID计算输出目标速度 这个速度,会和基础速度加减
g_fHW_PID_OUT1 = 3 + g_fHW_PID_OUT;//电机1速度=基础速度+循迹PID输出速度
g_fHW_PID_OUT2 = 3 - g_fHW_PID_OUT;//电机1速度=基础速度-循迹PID输出速度
if(g_fHW_PID_OUT1 > 5) g_fHW_PID_OUT1 = 5;//进行限幅 限幅速度在0-5之间
if(g_fHW_PID_OUT1 < 0) g_fHW_PID_OUT1 = 0;
if(g_fHW_PID_OUT2 > 5) g_fHW_PID_OUT2 = 5;
if(g_fHW_PID_OUT2 < 0) g_fHW_PID_OUT2 = 0;
if(g_cThisState != g_cLastState)//如何这次状态不等于上次状态、就进行改变目标速度和控制电机、在定时器中依旧定时控制电机
{
motorPidSetSpeed(g_fHW_PID_OUT1, g_fHW_PID_OUT2);//通过计算的速度控制电机
}
g_cLastState = g_cThisState;//保存上次红外对管状态十四、手机遥控
原理图

CubeMx配置
1、点击USART3模式选择异步通信
2、打开串口三全局中断
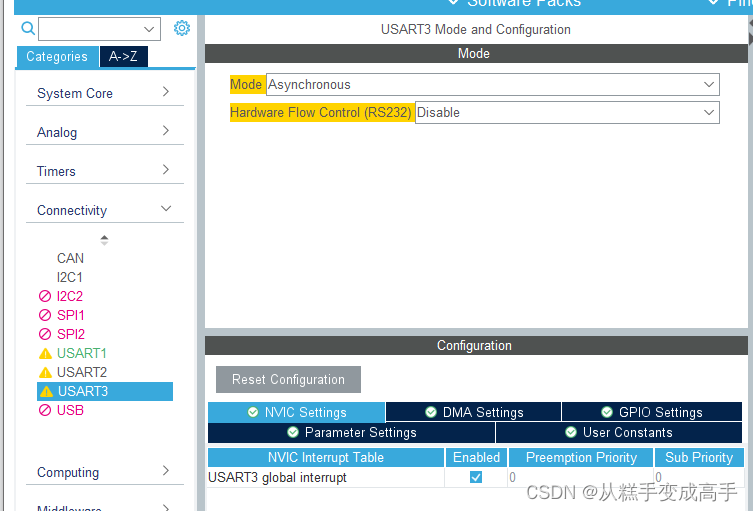
打开串口接收数据
HAL_UART_Receive_IT(&huart3, &g_ucUsart3ReceiveData, 1); //串口三接收数据重定义串口回调函数
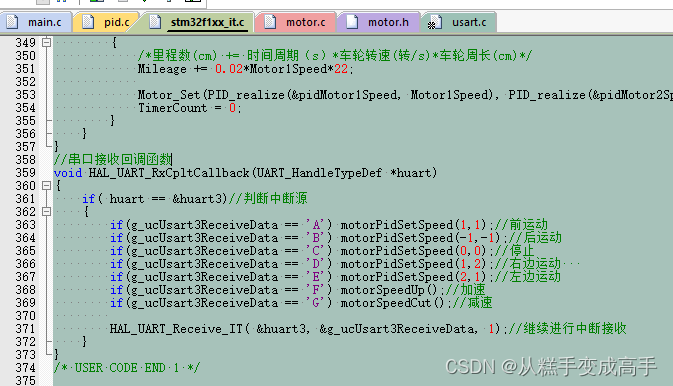
uint8_t g_ucUsart3ReceiveData; //保存串口三接收的数据//串口接收回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if( huart == &huart3)//判断中断源
{
if(g_ucUsart3ReceiveData == 'A') motorPidSetSpeed(1,1);//前运动
if(g_ucUsart3ReceiveData == 'B') motorPidSetSpeed(-1,-1);//后运动
if(g_ucUsart3ReceiveData == 'C') motorPidSetSpeed(0,0);//停止
if(g_ucUsart3ReceiveData == 'D') motorPidSetSpeed(1,2);//右边运动
if(g_ucUsart3ReceiveData == 'E') motorPidSetSpeed(2,1);//左边运动
if(g_ucUsart3ReceiveData == 'F') motorSpeedUp();//加速
if(g_ucUsart3ReceiveData == 'G') motorSpeedCut();//减速
HAL_UART_Receive_IT( &huart3, &g_ucUsart3ReceiveData, 1);//继续进行中断接收
}
}十五、超声波避障
GPIO工作模式
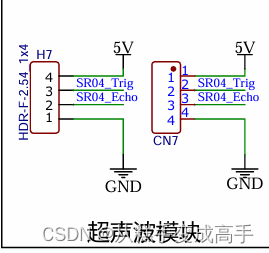
原理图
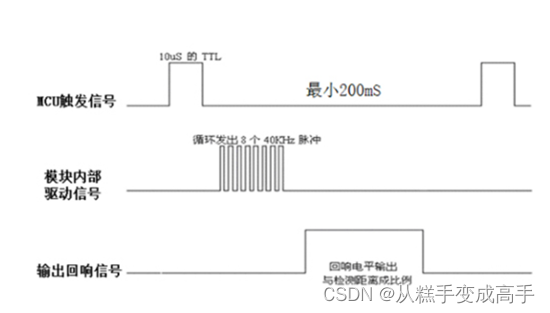
具体问题可参考HC_SR04工作原理
Trig(PB5)我们配置为GPIO输出
Echo(PA6)我们配置GPIO输入功能
CubeMx配置
HC_SR04.c
#include "HC_SR04.h"
//因为我们不适用定时器所以我们需要自己写一个us级延时函数
/*******************
* @brief us级延时
* @param usdelay:要延时的us时间
* @return
*
*******************/
void HC_SR04_Delayus(uint32_t usdelay)
{
__IO uint32_t Delay = usdelay * (SystemCoreClock / 8U / 1000U / 1000);//SystemCoreClock:系统频率
do
{
__NOP();
}
while(Delay --);
}
/*******************
* @brief HC_SR04读取超声波距离
* @param 无
* @return 障碍物距离单位:cm (静止表面平整精度更高)
*注意:两个HC_SR04_Read()函数调用的时间间隔要2ms及以上,测量范围更大 精度更高
*******************/
float HC_SR04_Read(void)
{
uint32_t i = 0;
float Distance;
HAL_GPIO_WritePin(HC_SR04_Ting_GPIO_Port, HC_SR04_Ting_Pin, GPIO_PIN_SET);//输出15us高电平
HC_SR04_Delayus(15);
HAL_GPIO_WritePin(HC_SR04_Ting_GPIO_Port, HC_SR04_Ting_Pin, GPIO_PIN_RESET);//高电平输出结束,设置为低电平
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port, HC_SR04_Echo_Pin) == GPIO_PIN_RESET)//等待回响高电平
{
i++;
HC_SR04_Delayus(1);
if(i>10000) return -1;//超时退出循环、防止程序卡死这里
}
i = 0;
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port, HC_SR04_Echo_Pin) == GPIO_PIN_SET)//下面循环是2us
{
i = i+1;
HC_SR04_Delayus(1);//1us 延时,但是整个循环大概是2us左右(因为延时1us 42-44行代码跑也需要一定的时间)
if(i>10000) return -2;//超时退出循环
}
Distance = i*2*0.033/2;//这里乘2的原因是上面的2us
return Distance;
}
HC_SR04.h
#ifndef __HC_SR04_H
#define __HC_SR04_H
#include "main.h"
void HC_SR04_Delayus(uint32_t usdelay);
float HC_SR04_Read(void);
#endif
main函数中加
//避障逻辑
if(HC_SR04_Read() > 25)//前方无障碍
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else//前方有障碍物
{
motorPidSetSpeed(-1,1);//向右原地转
HAL_Delay(500);
if(HC_SR04_Read() > 25)//右边无障碍
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else//右边有障碍
{
motorPidSetSpeed(1,-1);//向左原地转
HAL_Delay(1000);
if(HC_SR04_Read() > 25)//左边无障碍
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else
{
motorPidSetSpeed(-1,-1);//后退
HAL_Delay(1000);
motorPidSetSpeed(-1,1);//右运动
HAL_Delay(50);
}
}
}十六、超声波(PID)跟随
pid.c中加以下代码
tPid pidFollow;//定距离跟随PID
pidFollow.actual_val=0.0;
pidFollow.target_val=22.50;
pidFollow.err=0.0;
pidFollow.err_last=0.0;
pidFollow.err_sum=0.0;
pidFollow.kp=-0.5; //定距离跟随的Kp大小通过估算PID输入输出数据,确定大概大小,然后在调试
pidFollow.ki=-0.001;
pidFollow.kd=0;main.c中加以下代码
extern tpid pidFollow;
float g_fHC_SR04_Read;//超声波传感器读取障碍物数据
float g_fFollow_PID_OUT;//定距离跟随PID计算输出速度
g_fHC_SR04_Read = HC_SR04_Read();//读取前方障碍物距离
if(g_fHC_SR04_Read < 60)//如果前60cm 有东西就启动跟随
{
g_fFollow_PID_OUT = PID_realize(&pidFollow,g_fHC_SR04_Read);//PID计算输出目标速度 这个速度,会和基础速度加减
if(g_fFollow_PID_OUT > 6) g_fFollow_PID_OUT = 6;//对输出速度限幅
if(g_fFollow_PID_OUT < -6) g_fFollow_PID_OUT = -6;
motorPidSetSpeed(g_fFollow_PID_OUT, g_fFollow_PID_OUT);//速度作用与电机上
}
else motorPidSetSpeed(0,0);//如果前面60cm 没有东西就停止
HAL_Delay(10);//读取超声波传感器不能过快

![[职场] 硬件研发是什么职业 #职场发展#其他](https://img-blog.csdnimg.cn/img_convert/b514ef3a90a680b4c12ed0adeb53c82f.png)







![SecureCRT[po破] for Mac SSH终端操作工具[解] 安装教程](https://img-blog.csdnimg.cn/direct/54e47370a7f7403d9d7b1b14a09f7229.png)
