文章目录
- 一、简介
- 二、代码实现
- 三、实现效果
- 测试数据
- 参考文献
一、简介
深度图像的获取有很多方式,如激光雷达、结构光以及深度相机等,网上很多教程都是在讲解通过深度相机所获取的深度图像转换为三维点云数据(相机内参、外参),但是通过激光雷达所生成的深度相机通常与相机生成的存在一些不同之处。具体情况可以参考下图:
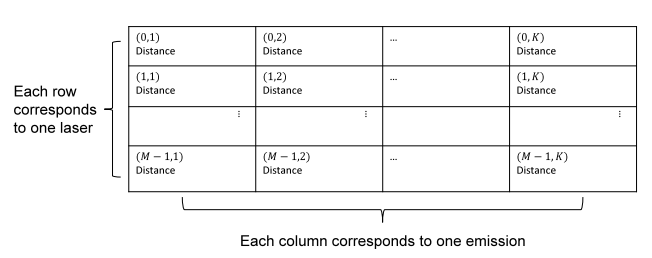
如上图所示,通过激光点云数据所生成的深度图像,每个像素的亮度值代表着物体到扫描仪的距离值,每一行的俯仰角(pitch)相同,每一列的偏航角(yaw)相同,所以这样的深度图像是通过深度值、俯仰角和偏航角来表示点云中的每一个点的。之所以会是这样,这主要是因为通过激光点云数据所生成深度图像的过程其实是一个采样的过程,如下图所示, O O <




![搜索?——P3956 [NOIP2017 普及组] 棋盘](https://img-blog.csdnimg.cn/a3c6d4baab174af28d8e89618c2c060a.png)