文章目录
- 3. 格林应变与阿尔曼西应变
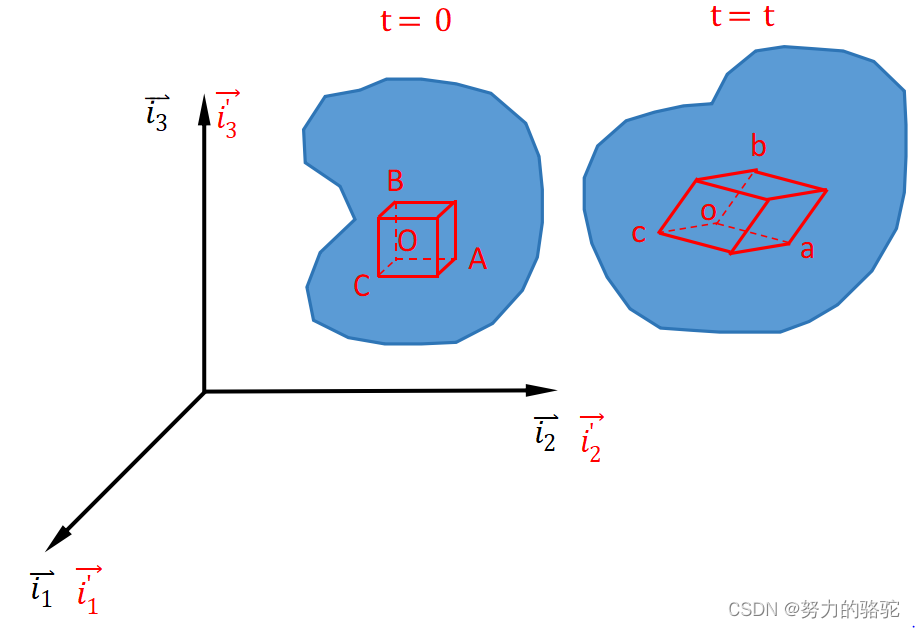
3. 格林应变与阿尔曼西应变
变形体在变形前的线元
O
A
→
\overrightarrow{OA}
OA,在变形后变成
o
a
→
\overrightarrow{oa}
oa,那么应变应该度量这种线元变形前后的差别。
∣
o
a
→
∣
2
−
∣
O
A
→
∣
2
=
d
x
i
d
x
i
−
d
x
i
′
d
x
i
′
=
∂
x
i
∂
x
j
′
d
x
j
′
⋅
∂
x
i
∂
x
k
′
d
x
k
′
−
d
x
i
′
d
x
i
′
=
∂
x
i
∂
x
j
′
∂
x
i
∂
x
k
′
d
x
j
′
d
x
k
′
−
d
x
i
′
d
x
i
′
=
(
∂
x
i
∂
x
j
′
∂
x
i
∂
x
k
′
−
δ
j
k
)
d
x
j
′
d
x
k
′
(3.1)
\begin{aligned} |\overrightarrow{oa}|^2-|\overrightarrow{OA}|^2&=dx_idx_i-dx^{'}_idx^{'}_i\\ &=\frac{\partial x_i}{\partial x^{'}_j}dx^{'}_j\cdot\frac{\partial x_i}{\partial x^{'}_k}dx^{'}_k-dx^{'}_idx^{'}_i\\ &=\frac{\partial x_i}{\partial x^{'}_j}\frac{\partial x_i}{\partial x^{'}_k}dx^{'}_jdx^{'}_k-dx^{'}_idx^{'}_i\\ &=(\frac{\partial x_i}{\partial x^{'}_j}\frac{\partial x_i}{\partial x^{'}_k}-\delta_{jk}) dx^{'}_jdx^{'}_k \end{aligned}\tag{3.1}
∣oa∣2−∣OA∣2=dxidxi−dxi′dxi′=∂xj′∂xidxj′⋅∂xk′∂xidxk′−dxi′dxi′=∂xj′∂xi∂xk′∂xidxj′dxk′−dxi′dxi′=(∂xj′∂xi∂xk′∂xi−δjk)dxj′dxk′(3.1)
上式中括号中为度量线元变化的无量纲度量,将此取为应变度量,即格林应变
E
i
j
=
1
2
(
∂
x
k
∂
x
i
′
∂
x
k
∂
x
j
′
−
δ
i
j
)
(3.2)
E_{ij}=\frac{1}{2}(\frac{\partial x_k}{\partial x^{'}_i}\frac{\partial x_k}{\partial x^{'}_j}-\delta_{ij}) \tag{3.2}
Eij=21(∂xi′∂xk∂xj′∂xk−δij)(3.2)
将其写成矩阵形式,如下所示
E
=
1
2
(
F
T
F
−
I
)
(3.3)
E=\frac{1}{2}(F^TF-I) \tag{3.3}
E=21(FTF−I)(3.3)
格林应变以变形前的位形作为参考状态,同样可以用变形后的位形作为参考状态,那么线元前后的变化如下式所示
∣
o
a
→
∣
2
−
∣
O
A
→
∣
2
=
d
x
i
d
x
i
−
d
x
i
′
d
x
i
′
=
δ
i
j
d
x
i
d
x
j
−
∂
x
i
′
∂
x
j
d
x
j
⋅
∂
x
i
′
∂
x
k
d
x
k
=
δ
i
j
d
x
i
d
x
j
−
∂
x
i
′
∂
x
j
∂
x
i
′
∂
x
k
d
x
j
d
x
k
=
(
δ
j
k
−
∂
x
i
′
∂
x
j
∂
x
i
′
∂
x
k
)
d
x
j
d
x
k
(3.4)
\begin{aligned} |\overrightarrow{oa}|^2-|\overrightarrow{OA}|^2&=dx_idx_i-dx^{'}_idx^{'}_i\\ &=\delta_{ij} dx_idx_j-\frac{\partial x^{'}_i}{\partial x_j}dx_j\cdot\frac{\partial x^{'}_i}{\partial x_k}dx_k\\ &=\delta_{ij} dx_idx_j-\frac{\partial x^{'}_i}{\partial x_j}\frac{\partial x^{'}_i}{\partial x_k}dx_jdx_k\\ &=(\delta_{jk}-\frac{\partial x^{'}_i}{\partial x_j}\frac{\partial x^{'}_i}{\partial x_k}) dx_jdx_k \end{aligned}\tag{3.4}
∣oa∣2−∣OA∣2=dxidxi−dxi′dxi′=δijdxidxj−∂xj∂xi′dxj⋅∂xk∂xi′dxk=δijdxidxj−∂xj∂xi′∂xk∂xi′dxjdxk=(δjk−∂xj∂xi′∂xk∂xi′)dxjdxk(3.4)
定义应变度量,即阿尔曼西应变
e
i
j
=
1
2
(
δ
i
j
−
∂
x
k
′
∂
x
i
∂
x
k
′
∂
x
j
)
(3.5)
e_{ij}=\frac{1}{2}(\delta_{ij}-\frac{\partial x^{'}_k}{\partial x_i}\frac{\partial x^{'}_k}{\partial x_j}) \tag{3.5}
eij=21(δij−∂xi∂xk′∂xj∂xk′)(3.5)
将其写成矩阵形式,如下所示
e
=
1
2
(
I
−
F
−
T
F
−
1
)
(3.6)
e=\frac{1}{2}(I-F^{-T}F^{-1}) \tag{3.6}
e=21(I−F−TF−1)(3.6)
欧拉描述和拉格朗日描述的位移如下所示
u
i
=
x
i
(
x
j
′
,
t
)
−
x
i
′
u
i
=
x
i
−
x
i
′
(
x
j
,
t
)
(3.7)
u_i=x_i(x^{'}_j,t)-x^{'}_i\\ u_i=x_i-x^{'}_i(x_j,t)\tag{3.7}
ui=xi(xj′,t)−xi′ui=xi−xi′(xj,t)(3.7)
如果用位移来表示上述两种应变,那么有
∂
u
i
∂
x
j
′
=
∂
x
i
∂
x
j
′
−
δ
i
j
∂
u
i
∂
x
j
=
δ
i
j
−
∂
x
i
′
∂
x
j
(3.8)
\frac{\partial u_i}{\partial x^{'}_j}=\frac{\partial x_i}{\partial x^{'}_j}-\delta_{ij}\\ \frac{\partial u_i}{\partial x_j}=\delta_{ij}-\frac{\partial x^{'}_i}{\partial x_j}\tag{3.8}
∂xj′∂ui=∂xj′∂xi−δij∂xj∂ui=δij−∂xj∂xi′(3.8)
将上式代入(3.2)式,可得
E
i
j
=
1
2
(
∂
x
k
∂
x
i
′
∂
x
k
∂
x
j
′
−
δ
i
j
)
=
1
2
[
(
∂
u
k
∂
x
i
′
+
δ
k
i
)
(
∂
u
k
∂
x
j
′
+
δ
k
j
)
−
δ
i
j
]
=
1
2
(
∂
u
k
∂
x
i
′
∂
u
k
∂
x
j
′
+
δ
k
i
∂
u
k
∂
x
j
′
+
δ
k
j
∂
u
k
∂
x
i
′
+
δ
k
i
δ
k
j
−
δ
i
j
)
=
1
2
(
∂
u
k
∂
x
i
′
∂
u
k
∂
x
j
′
+
∂
u
i
∂
x
j
′
+
∂
u
j
∂
x
i
′
)
(3.9)
\begin{aligned} E_{ij}&=\frac{1}{2}(\frac{\partial x_k}{\partial x^{'}_i}\frac{\partial x_k}{\partial x^{'}_j}-\delta_{ij}) \\ &=\frac{1}{2}[(\frac{\partial u_k}{\partial x^{'}_i}+\delta_{ki})(\frac{\partial u_k}{\partial x^{'}_j}+\delta_{kj})-\delta_{ij}]\\ &=\frac{1}{2}(\frac{\partial u_k}{\partial x^{'}_i}\frac{\partial u_k}{\partial x^{'}_j}+\delta_{ki}\frac{\partial u_k}{\partial x^{'}_j}+\delta_{kj}\frac{\partial u_k}{\partial x^{'}_i}+\delta_{ki}\delta_{kj}-\delta_{ij})\\ &=\frac{1}{2}(\frac{\partial u_k}{\partial x^{'}_i}\frac{\partial u_k}{\partial x^{'}_j}+\frac{\partial u_i}{\partial x^{'}_j}+\frac{\partial u_j}{\partial x^{'}_i})\tag{3.9} \end{aligned}
Eij=21(∂xi′∂xk∂xj′∂xk−δij)=21[(∂xi′∂uk+δki)(∂xj′∂uk+δkj)−δij]=21(∂xi′∂uk∂xj′∂uk+δki∂xj′∂uk+δkj∂xi′∂uk+δkiδkj−δij)=21(∂xi′∂uk∂xj′∂uk+∂xj′∂ui+∂xi′∂uj)(3.9)
将上式写成矩阵形式,此时需要引入哈密顿算子
∇
\nabla
∇和张量积
∇
u
=
[
∂
∂
x
∂
∂
y
∂
∂
z
]
[
u
x
u
y
u
z
]
=
[
∂
u
x
∂
x
∂
u
y
∂
x
∂
u
z
∂
x
∂
u
x
∂
y
∂
u
y
∂
y
∂
u
z
∂
y
∂
u
x
∂
z
∂
u
y
∂
z
∂
u
z
∂
z
]
u
∇
=
[
u
x
u
y
u
z
]
[
∂
∂
x
∂
∂
y
∂
∂
z
]
=
[
∂
u
x
∂
x
∂
u
x
∂
y
∂
u
x
∂
z
∂
u
y
∂
x
∂
u
y
∂
y
∂
u
y
∂
z
∂
u
z
∂
x
∂
u
z
∂
y
∂
u
z
∂
z
]
(3.10)
\nabla u=\begin{bmatrix} \frac{\partial}{\partial x}\\ \frac{\partial}{\partial y}\\ \frac{\partial}{\partial z} \end{bmatrix}\begin{bmatrix} u_x& u_y& u_z \end{bmatrix}=\begin{bmatrix} \frac{\partial u_x}{\partial x}& \frac{\partial u_y}{\partial x}& \frac{\partial u_z}{\partial x}\\ \frac{\partial u_x}{\partial y}& \frac{\partial u_y}{\partial y}& \frac{\partial u_z}{\partial y}\\ \frac{\partial u_x}{\partial z}& \frac{\partial u_y}{\partial z}& \frac{\partial u_z}{\partial z} \end{bmatrix}\\\quad\\ u\nabla =\begin{bmatrix}u_x\\ u_y\\ u_z \end{bmatrix}\begin{bmatrix} \frac{\partial}{\partial x}& \frac{\partial}{\partial y}& \frac{\partial}{\partial z} \end{bmatrix}=\begin{bmatrix} \frac{\partial u_x}{\partial x}& \frac{\partial u_x}{\partial y}& \frac{\partial u_x}{\partial z}\\ \frac{\partial u_y}{\partial x}& \frac{\partial u_y}{\partial y}& \frac{\partial u_y}{\partial z}\\ \frac{\partial u_z}{\partial x}& \frac{\partial u_z}{\partial y}& \frac{\partial u_z}{\partial z} \end{bmatrix}\tag{3.10}
∇u=
∂x∂∂y∂∂z∂
[uxuyuz]=
∂x∂ux∂y∂ux∂z∂ux∂x∂uy∂y∂uy∂z∂uy∂x∂uz∂y∂uz∂z∂uz
u∇=
uxuyuz
[∂x∂∂y∂∂z∂]=
∂x∂ux∂x∂uy∂x∂uz∂y∂ux∂y∂uy∂y∂uz∂z∂ux∂z∂uy∂z∂uz
(3.10)
那么式(3.9)矩阵形式为
E
=
1
2
(
∇
0
u
+
u
∇
0
+
∇
0
u
⋅
u
∇
0
)
(3.11)
E=\frac{1}{2}(\nabla_0 u+u\nabla_0 +\nabla_0 u\cdot u\nabla_0)\tag{3.11}
E=21(∇0u+u∇0+∇0u⋅u∇0)(3.11)
其中下标表示对初始坐标求微分。
将式(3.8)代入(3.5)式,可得
e
i
j
=
1
2
(
δ
i
j
−
∂
x
k
′
∂
x
i
∂
x
k
′
∂
x
j
)
=
1
2
[
δ
i
j
−
(
δ
k
i
−
∂
u
k
∂
x
i
)
(
δ
k
j
−
∂
u
k
∂
x
j
)
]
=
1
2
(
δ
i
j
−
δ
k
i
δ
k
j
+
δ
k
j
∂
u
k
∂
x
i
+
δ
k
i
∂
u
k
∂
x
j
−
∂
u
k
∂
x
i
∂
u
k
∂
x
j
)
=
1
2
(
∂
u
j
∂
x
i
+
∂
u
i
∂
x
j
−
∂
u
k
∂
x
i
∂
u
k
∂
x
j
)
(3.12)
\begin{aligned} e_{ij}&=\frac{1}{2}(\delta_{ij}-\frac{\partial x^{'}_k}{\partial x_i}\frac{\partial x^{'}_k}{\partial x_j}) \\ &=\frac{1}{2}[\delta_{ij}-(\delta_{ki}-\frac{\partial u_k}{\partial x_i})(\delta_{kj}-\frac{\partial u_k}{\partial x_j})]\\ &=\frac{1}{2}(\delta_{ij}-\delta_{ki}\delta_{kj}+\delta_{kj}\frac{\partial u_k}{\partial x_i}+\delta_{ki}\frac{\partial u_k}{\partial x_j}-\frac{\partial u_k}{\partial x_i}\frac{\partial u_k}{\partial x_j})\\ &=\frac{1}{2}(\frac{\partial u_j}{\partial x_i}+\frac{\partial u_i}{\partial x_j}-\frac{\partial u_k}{\partial x_i}\frac{\partial u_k}{\partial x_j}) \tag{3.12} \end{aligned}
eij=21(δij−∂xi∂xk′∂xj∂xk′)=21[δij−(δki−∂xi∂uk)(δkj−∂xj∂uk)]=21(δij−δkiδkj+δkj∂xi∂uk+δki∂xj∂uk−∂xi∂uk∂xj∂uk)=21(∂xi∂uj+∂xj∂ui−∂xi∂uk∂xj∂uk)(3.12)
那么式(3.12)矩阵形式为
e
=
1
2
(
∇
u
+
u
∇
−
∇
u
⋅
u
∇
)
(3.13)
e=\frac{1}{2}(\nabla u+u\nabla -\nabla u\cdot u\nabla)\tag{3.13}
e=21(∇u+u∇−∇u⋅u∇)(3.13)
下面对格林应变和阿尔曼西应变进行一些讨论。
将式(3.1)式进行一些变化,原式
∣
o
a
→
∣
2
−
∣
O
A
→
∣
2
=
2
E
i
j
d
x
i
′
d
x
j
′
(3.14)
\begin{aligned} |\overrightarrow{oa}|^2-|\overrightarrow{OA}|^2&=2E_{ij}dx^{'}_idx^{'}_j \end{aligned}\tag{3.14}
∣oa∣2−∣OA∣2=2Eijdxi′dxj′(3.14)
令
d
s
=
∣
o
a
→
∣
ds=|\overrightarrow{oa}|
ds=∣oa∣,
d
S
=
∣
O
A
→
∣
dS=|\overrightarrow{OA}|
dS=∣OA∣,那么
d
s
2
−
d
S
2
=
2
E
i
j
d
x
i
′
d
x
j
′
(3.15)
ds^2-dS^2=2E_{ij}dx^{'}_idx^{'}_j\tag{3.15}
ds2−dS2=2Eijdxi′dxj′(3.15)
将上式左右各除
d
S
2
dS^2
dS2,那么有
d
s
2
d
S
2
−
1
=
2
E
i
j
d
x
i
′
d
S
d
x
j
′
d
S
=
2
E
i
j
α
i
′
α
j
′
(3.16)
\begin{aligned} \frac{ds^2}{dS^2}-1&=2E_{ij}\frac{dx^{'}_i}{dS}\frac{dx^{'}_j}{dS}\\ &=2E_{ij}\alpha_i^{'}\alpha_j^{'} \end{aligned}\tag{3.16}
dS2ds2−1=2EijdSdxi′dSdxj′=2Eijαi′αj′(3.16)
其中
α
i
′
\alpha_i^{'}
αi′为
O
A
→
\overrightarrow{OA}
OA单位化后的各分量。
在一维情况下,小应变为
ϵ
=
d
s
−
d
S
d
S
\epsilon=\frac{ds-dS}{dS}
ϵ=dSds−dS,代入可得
(
ϵ
+
1
)
2
=
1
+
2
E
11
→
2
ϵ
+
ϵ
2
=
2
E
11
(3.17)
(\epsilon+1)^2=1+2E_{11}\rightarrow2\epsilon+\epsilon^2=2E_{11}\tag{3.17}
(ϵ+1)2=1+2E11→2ϵ+ϵ2=2E11(3.17)
上述都是针对线应变,现在来讨论角应变,在讨论角应变时,式(3.1)就应该改为
∣
o
a
→
∣
⋅
∣
o
b
→
∣
−
∣
O
A
→
∣
⋅
∣
O
B
→
∣
=
d
x
i
δ
x
i
−
d
x
i
′
δ
x
i
′
=
∂
x
i
∂
x
j
′
d
x
j
′
⋅
∂
x
i
∂
x
k
′
δ
x
k
′
−
d
x
i
′
δ
x
i
′
=
∂
x
m
∂
x
i
′
∂
x
m
∂
x
j
′
d
x
i
′
δ
x
j
′
−
d
x
i
′
δ
x
i
′
=
(
∂
x
m
∂
x
i
′
∂
x
m
∂
x
j
′
−
δ
i
j
)
d
x
i
′
δ
x
j
′
=
2
E
i
j
d
x
i
′
δ
x
j
′
(3.1’)
\begin{aligned} |\overrightarrow{oa}|\cdot |\overrightarrow{ob}|-|\overrightarrow{OA}|\cdot|\overrightarrow{OB}|&=dx_i\delta x_i-dx^{'}_i\delta x^{'}_i\\ &=\frac{\partial x_i}{\partial x^{'}_j}dx^{'}_j\cdot\frac{\partial x_i}{\partial x^{'}_k}\delta x^{'}_k-dx^{'}_i\delta x^{'}_i\\ &=\frac{\partial x_m}{\partial x^{'}_i}\frac{\partial x_m}{\partial x^{'}_j}dx^{'}_i\delta x^{'}_j-dx^{'}_i \delta x^{'}_i\\ &=(\frac{\partial x_m}{\partial x^{'}_i}\frac{\partial x_m}{\partial x^{'}_j}-\delta_{ij}) dx^{'}_i\delta x^{'}_j\\ &=2E_{ij}dx^{'}_i\delta x^{'}_j \end{aligned}\tag{3.1'}
∣oa∣⋅∣ob∣−∣OA∣⋅∣OB∣=dxiδxi−dxi′δxi′=∂xj′∂xidxj′⋅∂xk′∂xiδxk′−dxi′δxi′=∂xi′∂xm∂xj′∂xmdxi′δxj′−dxi′δxi′=(∂xi′∂xm∂xj′∂xm−δij)dxi′δxj′=2Eijdxi′δxj′(3.1’)
上式进一步改为
∣
o
a
→
∣
⋅
∣
o
b
→
∣
−
∣
O
A
→
∣
⋅
∣
O
B
→
∣
=
d
s
δ
s
cos
θ
−
d
S
δ
S
cos
θ
0
=
2
E
i
j
d
x
i
′
δ
x
j
′
(3.18)
\begin{aligned} |\overrightarrow{oa}|\cdot |\overrightarrow{ob}|-|\overrightarrow{OA}|\cdot|\overrightarrow{OB}| &=ds\delta s\cos\theta-dS\delta S\cos\theta_0\\ &=2E_{ij}dx^{'}_i\delta x^{'}_j \end{aligned}\tag{3.18}
∣oa∣⋅∣ob∣−∣OA∣⋅∣OB∣=dsδscosθ−dSδScosθ0=2Eijdxi′δxj′(3.18)
上式两端除以
d
S
δ
S
dS\delta S
dSδS,同时
θ
0
=
π
2
\theta_0=\frac{\pi}{2}
θ0=2π,
α
i
=
d
x
i
′
d
S
\alpha_i=\frac{dx^{'}_i}{dS}
αi=dSdxi′,
α
j
=
δ
x
j
′
δ
S
\alpha_j=\frac{\delta x^{'}_j}{\delta S}
αj=δSδxj′,因此上式改为
d
s
d
S
δ
s
δ
S
cos
θ
−
cos
θ
0
=
d
s
d
S
δ
s
δ
S
cos
θ
=
λ
a
λ
b
sin
θ
a
b
=
2
E
i
j
α
i
α
j
(3.19)
\begin{aligned} \frac{ds}{dS} \frac{\delta s}{\delta S}\cos\theta-\cos\theta_0 &=\frac{ds}{dS} \frac{\delta s}{\delta S}\cos\theta\\ &=\lambda^{a}\lambda^{b}\sin\theta_{ab}\\ &=2E_{ij}\alpha_i\alpha_j \end{aligned}\tag{3.19}
dSdsδSδscosθ−cosθ0=dSdsδSδscosθ=λaλbsinθab=2Eijαiαj(3.19)
其中
sin
θ
a
b
=
π
2
−
θ
\sin\theta_{ab}=\frac{\pi}{2}-\theta
sinθab=2π−θ即为角应变,由下式确定
sin
θ
a
b
=
2
E
i
j
α
i
α
j
λ
a
λ
b
(3.20)
\sin\theta_{ab}=\frac{2E_{ij}\alpha_i\alpha_j}{\lambda^{a}\lambda^{b}}\tag{3.20}
sinθab=λaλb2Eijαiαj(3.20)
格林应变张量中的
E
i
j
E_{ij}
Eij与角应变的关系中还包含线伸长量,因此不想小应变假设中的
γ
i
j
\gamma_{ij}
γij这么简单。