基于EBAZ4205矿板的图像处理:10gamma变换
项目全部文件
会上传项目全部文件,如果没传,可以私信催我一下,最近太忙了
先看效果


我的项目中的gamma的变换系数为2.2,是会让图像整体变暗的,看右图说明我的gamma变换模块生效了。
算法
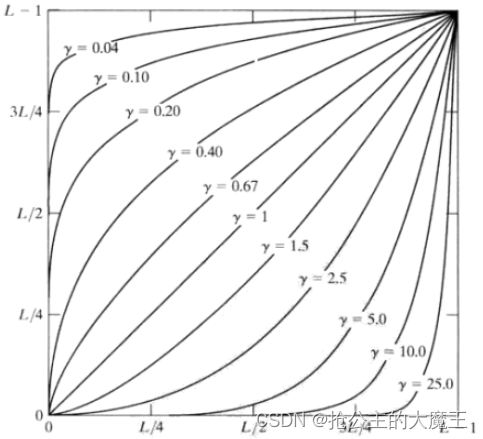
gamma映射是一种简单的、常见的图像处理方法,它能够拓展图像的低亮度区域的灰度级数,让图像的低亮度区域呈现更多的细节,但同时也会让图像的整体亮度变暗,有利有弊。
算法的公式为: y = A*x^g
其中,x为像素点的像素灰度值输入,y为像素点的像素灰度值变换结果,A为归一化系数,g为gamma变换系数。
下图是不同系数的gamma变换曲线。
算法的FPGA部署
首先,gamma变换是个指数函数。用FPGA来运算指数函数相当耗时,所以为了提升速度,我们采用查表法,既将某个gamma变换系数下的0~255灰度等级的所有对应变换结果算出来,然后在需要映射时,直接查表即可。
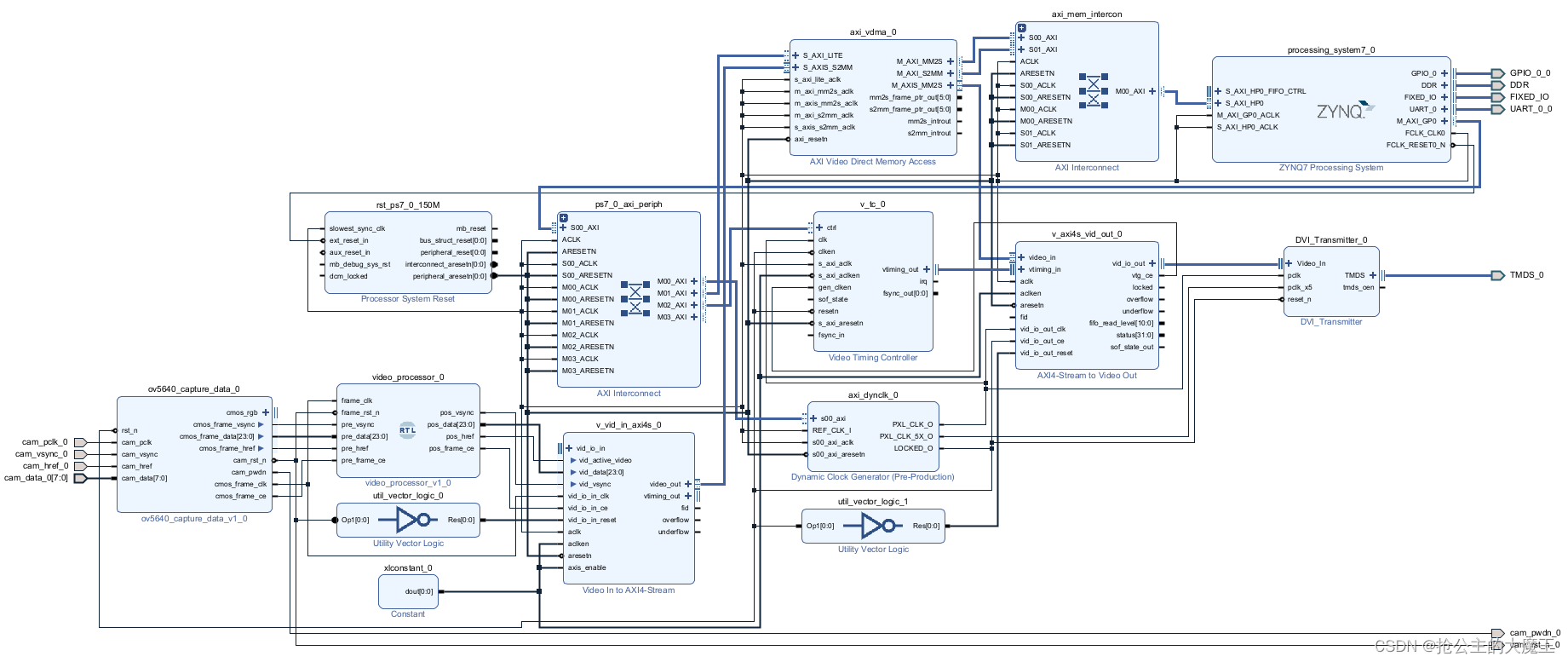
BD
项目代码
图像处理模块
module video_processor(
(* X_INTERFACE_IGNORE = "true" *) input frame_clk, //cmos 像素时钟
(* X_INTERFACE_IGNORE = "true" *) input frame_rst_n,
//预处理图像
(* X_INTERFACE_IGNORE = "true" *) input pre_vsync, //预处理图像场同步信号
(* X_INTERFACE_IGNORE = "true" *) input [23:0] pre_data, //预处理图像数据
(* X_INTERFACE_IGNORE = "true" *) input pre_href, //预处理图像数据有效信号
(* X_INTERFACE_IGNORE = "true" *) input pre_frame_ce, //预处理图像时钟使能信号
//处理后图像
(* X_INTERFACE_IGNORE = "true" *) output pos_vsync, //处理后图像场同步信号
(* X_INTERFACE_IGNORE = "true" *) output [23:0] pos_data, //处理后图像数据
(* X_INTERFACE_IGNORE = "true" *) output pos_href, //处理后图像数据有效信号
(* X_INTERFACE_IGNORE = "true" *) output pos_frame_ce //处理后图像时钟使能信号
);
wire [7:0] gray_data ;
wire [7:0] post_gray_data ;
rgb2gray u_rgb2gray(
.cmos_frame_clk (frame_clk ),
.cmos_rstn (frame_rst_n ),//同步复位
.cmos_frame_vsync (pre_vsync ),
.cmos_frame_data (pre_data ),
.cmos_frame_href (pre_href ),
.cmos_frame_ce (pre_frame_ce ),
.dataout_frame_vsync(pos_vsync ),
.dataout_frame_data (gray_data ),
.dataout_frame_href (pos_href ),
.dataout_frame_ce (pos_frame_ce )
);
assign pos_data = {3{post_gray_data}};
Curve_Gamma_2P2 u_Curve_Gamma_2P2(
.Pre_Data (gray_data),
.Post_Data(post_gray_data)
);
endmodule
色彩转换模块
`timescale 1ns / 1ps
module rgb2gray(
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_vsync,
(* X_INTERFACE_IGNORE = "true" *) input [23:0] cmos_frame_data,
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_href,
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_clk,
(* X_INTERFACE_IGNORE = "true" *) input cmos_rstn,//同步复位
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_ce,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_vsync,
(* X_INTERFACE_IGNORE = "true" *) output [7:0] dataout_frame_data,
// (* X_INTERFACE_IGNORE = "true" *) output [23:0] dataout_frame_data,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_href,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_ce
);
// Y = 0.299R +0.587G + 0.114B
// Y = (77 *R + 150*G + 29 *B)>>8
reg [15:0] r_gray1;
reg [15:0] g_gray1;
reg [15:0] b_gray1;
reg [15:0] y1;
reg [7:0] y2;
reg [2:0] dataout_frame_vsync_r;
reg [2:0] dataout_frame_href_r;
reg [2:0] dataout_frame_ce_r;
always@(posedge cmos_frame_clk)begin
if(!cmos_rstn)begin
r_gray1 <= 8'h00;
g_gray1 <= 8'h00;
b_gray1 <= 8'h00;
end
else begin
r_gray1 <= cmos_frame_data[23:16] * 8'd77 ;
g_gray1 <= cmos_frame_data[15:8] * 8'd150;
b_gray1 <= cmos_frame_data[7:0] * 8'd29 ;
end
end
always@(posedge cmos_frame_clk)begin
if(!cmos_rstn)begin
y1 <= 16'h0000;
end
else begin
y1 <= r_gray1 + g_gray1 + b_gray1;
end
end
always@(posedge cmos_frame_clk)begin
if(!cmos_rstn)begin
y2 <= 8'h0000;
end
else begin
y2 <= y1[15:8];
end
end
always@(posedge cmos_frame_clk)begin
if(!cmos_rstn)begin
dataout_frame_ce_r <= 3'b000;
dataout_frame_vsync_r <= 3'b000;
dataout_frame_href_r <= 3'b000;
end
else begin
dataout_frame_ce_r <= {dataout_frame_ce_r[1:0] ,cmos_frame_ce};
dataout_frame_vsync_r <= {dataout_frame_vsync_r[1:0] ,cmos_frame_vsync};
dataout_frame_href_r <= {dataout_frame_href_r[1:0] ,cmos_frame_href};
end
end
// assign dataout_frame_data = {y2,y2,y2};
assign dataout_frame_data = y2;
assign dataout_frame_ce = dataout_frame_ce_r[2];
assign dataout_frame_vsync = dataout_frame_vsync_r[2];
assign dataout_frame_href = dataout_frame_href_r[2];
endmodule
gamma映射模块
//Curve of Gamma = 2.2
module Curve_Gamma_2P2
(
input [7:0] Pre_Data,
output reg [7:0] Post_Data
);
always@(*)
begin
case(Pre_Data)
8'h00 : Post_Data = 8'h00;
8'h01 : Post_Data = 8'h00;
8'h02 : Post_Data = 8'h00;
8'h03 : Post_Data = 8'h00;
8'h04 : Post_Data = 8'h00;
8'h05 : Post_Data = 8'h00;
8'h06 : Post_Data = 8'h00;
8'h07 : Post_Data = 8'h00;
8'h08 : Post_Data = 8'h00;
8'h09 : Post_Data = 8'h00;
8'h0A : Post_Data = 8'h00;
8'h0B : Post_Data = 8'h00;
8'h0C : Post_Data = 8'h00;
8'h0D : Post_Data = 8'h00;
8'h0E : Post_Data = 8'h00;
8'h0F : Post_Data = 8'h01;
8'h10 : Post_Data = 8'h01;
8'h11 : Post_Data = 8'h01;
8'h12 : Post_Data = 8'h01;
8'h13 : Post_Data = 8'h01;
8'h14 : Post_Data = 8'h01;
8'h15 : Post_Data = 8'h01;
8'h16 : Post_Data = 8'h01;
8'h17 : Post_Data = 8'h01;
8'h18 : Post_Data = 8'h01;
8'h19 : Post_Data = 8'h02;
8'h1A : Post_Data = 8'h02;
8'h1B : Post_Data = 8'h02;
8'h1C : Post_Data = 8'h02;
8'h1D : Post_Data = 8'h02;
8'h1E : Post_Data = 8'h02;
8'h1F : Post_Data = 8'h02;
8'h20 : Post_Data = 8'h03;
8'h21 : Post_Data = 8'h03;
8'h22 : Post_Data = 8'h03;
8'h23 : Post_Data = 8'h03;
8'h24 : Post_Data = 8'h03;
8'h25 : Post_Data = 8'h04;
8'h26 : Post_Data = 8'h04;
8'h27 : Post_Data = 8'h04;
8'h28 : Post_Data = 8'h04;
8'h29 : Post_Data = 8'h05;
8'h2A : Post_Data = 8'h05;
8'h2B : Post_Data = 8'h05;
8'h2C : Post_Data = 8'h05;
8'h2D : Post_Data = 8'h06;
8'h2E : Post_Data = 8'h06;
8'h2F : Post_Data = 8'h06;
8'h30 : Post_Data = 8'h06;
8'h31 : Post_Data = 8'h07;
8'h32 : Post_Data = 8'h07;
8'h33 : Post_Data = 8'h07;
8'h34 : Post_Data = 8'h08;
8'h35 : Post_Data = 8'h08;
8'h36 : Post_Data = 8'h08;
8'h37 : Post_Data = 8'h09;
8'h38 : Post_Data = 8'h09;
8'h39 : Post_Data = 8'h09;
8'h3A : Post_Data = 8'h0A;
8'h3B : Post_Data = 8'h0A;
8'h3C : Post_Data = 8'h0B;
8'h3D : Post_Data = 8'h0B;
8'h3E : Post_Data = 8'h0B;
8'h3F : Post_Data = 8'h0C;
8'h40 : Post_Data = 8'h0C;
8'h41 : Post_Data = 8'h0D;
8'h42 : Post_Data = 8'h0D;
8'h43 : Post_Data = 8'h0D;
8'h44 : Post_Data = 8'h0E;
8'h45 : Post_Data = 8'h0E;
8'h46 : Post_Data = 8'h0F;
8'h47 : Post_Data = 8'h0F;
8'h48 : Post_Data = 8'h10;
8'h49 : Post_Data = 8'h10;
8'h4A : Post_Data = 8'h11;
8'h4B : Post_Data = 8'h11;
8'h4C : Post_Data = 8'h12;
8'h4D : Post_Data = 8'h12;
8'h4E : Post_Data = 8'h13;
8'h4F : Post_Data = 8'h13;
8'h50 : Post_Data = 8'h14;
8'h51 : Post_Data = 8'h14;
8'h52 : Post_Data = 8'h15;
8'h53 : Post_Data = 8'h16;
8'h54 : Post_Data = 8'h16;
8'h55 : Post_Data = 8'h17;
8'h56 : Post_Data = 8'h17;
8'h57 : Post_Data = 8'h18;
8'h58 : Post_Data = 8'h19;
8'h59 : Post_Data = 8'h19;
8'h5A : Post_Data = 8'h1A;
8'h5B : Post_Data = 8'h1A;
8'h5C : Post_Data = 8'h1B;
8'h5D : Post_Data = 8'h1C;
8'h5E : Post_Data = 8'h1C;
8'h5F : Post_Data = 8'h1D;
8'h60 : Post_Data = 8'h1E;
8'h61 : Post_Data = 8'h1E;
8'h62 : Post_Data = 8'h1F;
8'h63 : Post_Data = 8'h20;
8'h64 : Post_Data = 8'h21;
8'h65 : Post_Data = 8'h21;
8'h66 : Post_Data = 8'h22;
8'h67 : Post_Data = 8'h23;
8'h68 : Post_Data = 8'h23;
8'h69 : Post_Data = 8'h24;
8'h6A : Post_Data = 8'h25;
8'h6B : Post_Data = 8'h26;
8'h6C : Post_Data = 8'h27;
8'h6D : Post_Data = 8'h27;
8'h6E : Post_Data = 8'h28;
8'h6F : Post_Data = 8'h29;
8'h70 : Post_Data = 8'h2A;
8'h71 : Post_Data = 8'h2B;
8'h72 : Post_Data = 8'h2B;
8'h73 : Post_Data = 8'h2C;
8'h74 : Post_Data = 8'h2D;
8'h75 : Post_Data = 8'h2E;
8'h76 : Post_Data = 8'h2F;
8'h77 : Post_Data = 8'h30;
8'h78 : Post_Data = 8'h31;
8'h79 : Post_Data = 8'h31;
8'h7A : Post_Data = 8'h32;
8'h7B : Post_Data = 8'h33;
8'h7C : Post_Data = 8'h34;
8'h7D : Post_Data = 8'h35;
8'h7E : Post_Data = 8'h36;
8'h7F : Post_Data = 8'h37;
8'h80 : Post_Data = 8'h38;
8'h81 : Post_Data = 8'h39;
8'h82 : Post_Data = 8'h3A;
8'h83 : Post_Data = 8'h3B;
8'h84 : Post_Data = 8'h3C;
8'h85 : Post_Data = 8'h3D;
8'h86 : Post_Data = 8'h3E;
8'h87 : Post_Data = 8'h3F;
8'h88 : Post_Data = 8'h40;
8'h89 : Post_Data = 8'h41;
8'h8A : Post_Data = 8'h42;
8'h8B : Post_Data = 8'h43;
8'h8C : Post_Data = 8'h44;
8'h8D : Post_Data = 8'h45;
8'h8E : Post_Data = 8'h46;
8'h8F : Post_Data = 8'h47;
8'h90 : Post_Data = 8'h49;
8'h91 : Post_Data = 8'h4A;
8'h92 : Post_Data = 8'h4B;
8'h93 : Post_Data = 8'h4C;
8'h94 : Post_Data = 8'h4D;
8'h95 : Post_Data = 8'h4E;
8'h96 : Post_Data = 8'h4F;
8'h97 : Post_Data = 8'h51;
8'h98 : Post_Data = 8'h52;
8'h99 : Post_Data = 8'h53;
8'h9A : Post_Data = 8'h54;
8'h9B : Post_Data = 8'h55;
8'h9C : Post_Data = 8'h57;
8'h9D : Post_Data = 8'h58;
8'h9E : Post_Data = 8'h59;
8'h9F : Post_Data = 8'h5A;
8'hA0 : Post_Data = 8'h5B;
8'hA1 : Post_Data = 8'h5D;
8'hA2 : Post_Data = 8'h5E;
8'hA3 : Post_Data = 8'h5F;
8'hA4 : Post_Data = 8'h61;
8'hA5 : Post_Data = 8'h62;
8'hA6 : Post_Data = 8'h63;
8'hA7 : Post_Data = 8'h64;
8'hA8 : Post_Data = 8'h66;
8'hA9 : Post_Data = 8'h67;
8'hAA : Post_Data = 8'h69;
8'hAB : Post_Data = 8'h6A;
8'hAC : Post_Data = 8'h6B;
8'hAD : Post_Data = 8'h6D;
8'hAE : Post_Data = 8'h6E;
8'hAF : Post_Data = 8'h6F;
8'hB0 : Post_Data = 8'h71;
8'hB1 : Post_Data = 8'h72;
8'hB2 : Post_Data = 8'h74;
8'hB3 : Post_Data = 8'h75;
8'hB4 : Post_Data = 8'h77;
8'hB5 : Post_Data = 8'h78;
8'hB6 : Post_Data = 8'h79;
8'hB7 : Post_Data = 8'h7B;
8'hB8 : Post_Data = 8'h7C;
8'hB9 : Post_Data = 8'h7E;
8'hBA : Post_Data = 8'h7F;
8'hBB : Post_Data = 8'h81;
8'hBC : Post_Data = 8'h82;
8'hBD : Post_Data = 8'h84;
8'hBE : Post_Data = 8'h85;
8'hBF : Post_Data = 8'h87;
8'hC0 : Post_Data = 8'h89;
8'hC1 : Post_Data = 8'h8A;
8'hC2 : Post_Data = 8'h8C;
8'hC3 : Post_Data = 8'h8D;
8'hC4 : Post_Data = 8'h8F;
8'hC5 : Post_Data = 8'h91;
8'hC6 : Post_Data = 8'h92;
8'hC7 : Post_Data = 8'h94;
8'hC8 : Post_Data = 8'h95;
8'hC9 : Post_Data = 8'h97;
8'hCA : Post_Data = 8'h99;
8'hCB : Post_Data = 8'h9A;
8'hCC : Post_Data = 8'h9C;
8'hCD : Post_Data = 8'h9E;
8'hCE : Post_Data = 8'h9F;
8'hCF : Post_Data = 8'hA1;
8'hD0 : Post_Data = 8'hA3;
8'hD1 : Post_Data = 8'hA5;
8'hD2 : Post_Data = 8'hA6;
8'hD3 : Post_Data = 8'hA8;
8'hD4 : Post_Data = 8'hAA;
8'hD5 : Post_Data = 8'hAC;
8'hD6 : Post_Data = 8'hAD;
8'hD7 : Post_Data = 8'hAF;
8'hD8 : Post_Data = 8'hB1;
8'hD9 : Post_Data = 8'hB3;
8'hDA : Post_Data = 8'hB5;
8'hDB : Post_Data = 8'hB6;
8'hDC : Post_Data = 8'hB8;
8'hDD : Post_Data = 8'hBA;
8'hDE : Post_Data = 8'hBC;
8'hDF : Post_Data = 8'hBE;
8'hE0 : Post_Data = 8'hC0;
8'hE1 : Post_Data = 8'hC2;
8'hE2 : Post_Data = 8'hC4;
8'hE3 : Post_Data = 8'hC5;
8'hE4 : Post_Data = 8'hC7;
8'hE5 : Post_Data = 8'hC9;
8'hE6 : Post_Data = 8'hCB;
8'hE7 : Post_Data = 8'hCD;
8'hE8 : Post_Data = 8'hCF;
8'hE9 : Post_Data = 8'hD1;
8'hEA : Post_Data = 8'hD3;
8'hEB : Post_Data = 8'hD5;
8'hEC : Post_Data = 8'hD7;
8'hED : Post_Data = 8'hD9;
8'hEE : Post_Data = 8'hDB;
8'hEF : Post_Data = 8'hDD;
8'hF0 : Post_Data = 8'hDF;
8'hF1 : Post_Data = 8'hE1;
8'hF2 : Post_Data = 8'hE3;
8'hF3 : Post_Data = 8'hE5;
8'hF4 : Post_Data = 8'hE7;
8'hF5 : Post_Data = 8'hEA;
8'hF6 : Post_Data = 8'hEC;
8'hF7 : Post_Data = 8'hEE;
8'hF8 : Post_Data = 8'hF0;
8'hF9 : Post_Data = 8'hF2;
8'hFA : Post_Data = 8'hF4;
8'hFB : Post_Data = 8'hF6;
8'hFC : Post_Data = 8'hF8;
8'hFD : Post_Data = 8'hFB;
8'hFE : Post_Data = 8'hFD;
8'hFF : Post_Data = 8'hFF;
endcase
end
endmodule
vitis代码
//作者:抢公主的大魔王
//功能:gamma映射
//日期:24.5.27
//版本:1v0
//联系方式:2376635586@qq.com
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "xil_types.h"
#include "xil_cache.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xscugic.h"
#include "xil_exception.h"
#include "xplatform_info.h"
#include "xaxivdma.h"
#include "xaxivdma_i.h"
#include "display_ctrl_hdmi/display_ctrl.h"
#include "vdma_api/vdma_api.h"
#include "emio_sccb_cfg/emio_sccb_cfg.h"
#include "ov5640/ov5640_init.h"
#include "sleep.h"
//宏定义
#define DYNCLK_BASEADDR XPAR_AXI_DYNCLK_0_BASEADDR //动态时钟基地址
#define VDMA_ID XPAR_AXIVDMA_0_DEVICE_ID //VDMA器件ID
#define DISP_VTC_ID XPAR_VTC_0_DEVICE_ID //VTC器件ID
//#define THRESHOLD_BASEADDR XPAR_AXICTRLTHRESHOLD_0_S00_AXI_BASEADDR
#define EMIO_SCL_NUM 54
#define EMIO_SDA_NUM 55
#define KEY1 56 //T19
#define KEY2 57 //P19
#define KEY3 58 //U20
#define KEY4 59 //U19
#define KEY5 60 //V20
#define LED1 61 //H18
#define LED2 62 //K17
#define LED3 63 //E19
#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID
XGpioPs Gpio;
#define GPIO_BANK XGPIOPS_BANK0 /* Bank 0 of the GPIO Device */
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define GPIO_INTERRUPT_ID XPAR_XGPIOPS_0_INTR
//全局变量
//frame buffer的起始地址
unsigned int const frame_buffer_addr = (XPAR_PS7_DDR_0_S_AXI_BASEADDR
+ 0x1000000);
//u8 binary_threshold = 128;
XAxiVdma vdma;
DisplayCtrl dispCtrl;
VideoMode vd_mode;
static XScuGic Intc; /* The Instance of the Interrupt Controller Driver */
static void IntrHandler(void *CallBackRef, u32 Bank, u32 Status)
{
XGpioPs *Gpio_cb = (XGpioPs *)CallBackRef;
if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY1)){
//binary_threshold++;
//Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);
//xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);
XGpioPs_IntrClearPin(Gpio_cb, KEY1);
}
else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY4)){
//binary_threshold--;
//Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);
//xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);
XGpioPs_IntrClearPin(Gpio_cb, KEY4);
}
else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY2)){
//binary_threshold = binary_threshold+10;
//Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);
//xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);
XGpioPs_IntrClearPin(Gpio_cb, KEY2);
}
else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY5)){
//binary_threshold = binary_threshold-10;
//Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);
//xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);
XGpioPs_IntrClearPin(Gpio_cb, KEY5);
}
else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY3)){
//binary_threshold = 128;
//Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);
//xil_printf("The threshold has been reset\n\rThe threshold now is %d\n\r",binary_threshold);
XGpioPs_IntrClearPin(Gpio_cb, KEY3);
}
XGpioPs_WritePin(&Gpio, LED1, !XGpioPs_ReadPin(&Gpio, LED1));
}
void SetupInterruptSystem(XScuGic *GicInstancePtr, XGpioPs *Gpio,
u16 GpioIntrId){
XScuGic_Config *IntcConfig;
Xil_ExceptionInit();
IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
XScuGic_CfgInitialize(GicInstancePtr, IntcConfig,
IntcConfig->CpuBaseAddress);
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler)XScuGic_InterruptHandler,
GicInstancePtr);
XScuGic_Connect(GicInstancePtr, GpioIntrId,
(Xil_ExceptionHandler)IntrHandler,
(void *)Gpio);
XScuGic_Enable(GicInstancePtr, GpioIntrId);
XGpioPs_SetIntrTypePin(Gpio, KEY1, XGPIOPS_IRQ_TYPE_EDGE_FALLING);
XGpioPs_SetIntrTypePin(Gpio, KEY2, XGPIOPS_IRQ_TYPE_EDGE_FALLING);
XGpioPs_SetIntrTypePin(Gpio, KEY3, XGPIOPS_IRQ_TYPE_EDGE_FALLING);
XGpioPs_SetIntrTypePin(Gpio, KEY4, XGPIOPS_IRQ_TYPE_EDGE_FALLING);
XGpioPs_SetIntrTypePin(Gpio, KEY5, XGPIOPS_IRQ_TYPE_EDGE_FALLING);
XGpioPs_IntrEnablePin(Gpio, KEY1);
XGpioPs_IntrEnablePin(Gpio, KEY2);
XGpioPs_IntrEnablePin(Gpio, KEY3);
XGpioPs_IntrEnablePin(Gpio, KEY4);
XGpioPs_IntrEnablePin(Gpio, KEY5);
Xil_ExceptionEnableMask(XIL_EXCEPTION_IRQ);
}
void Gpio_Init(void){
XGpioPs_Config *ConfigPtr;
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
XGpioPs_CfgInitialize(&Gpio, ConfigPtr,ConfigPtr->BaseAddr);
XGpioPs_SetDirectionPin(&Gpio, LED1, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED1, 1);
XGpioPs_WritePin(&Gpio, LED1, 0);
XGpioPs_SetDirectionPin(&Gpio, LED2, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED2, 1);
XGpioPs_WritePin(&Gpio, LED2, 0);
XGpioPs_SetDirectionPin(&Gpio, LED3, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED3, 1);
XGpioPs_WritePin(&Gpio, LED3, 0);
XGpioPs_SetDirectionPin(&Gpio, KEY1, 0);
XGpioPs_SetDirectionPin(&Gpio, KEY2, 0);
XGpioPs_SetDirectionPin(&Gpio, KEY3, 0);
XGpioPs_SetDirectionPin(&Gpio, KEY4, 0);
XGpioPs_SetDirectionPin(&Gpio, KEY5, 0);
SetupInterruptSystem(&Intc, &Gpio, GPIO_INTERRUPT_ID);
}
int main(void)
{
u32 status;
u16 cmos_h_pixel; //ov5640 DVP 输出水平像素点数
u16 cmos_v_pixel; //ov5640 DVP 输出垂直像素点数
u16 total_h_pixel; //ov5640 水平总像素大小
u16 total_v_pixel; //ov5640 垂直总像素大小
cmos_h_pixel = 1280;
cmos_v_pixel = 720;
total_h_pixel = 2570;
total_v_pixel = 980;
emio_init();
status = ov5640_init( cmos_h_pixel, //初始化ov5640
cmos_v_pixel,
total_h_pixel,
total_v_pixel);//设置OV5640输出分辨率为1280*720 PCLK = 72Mhz
if(status == 0)
xil_printf("OV5640 detected successful!\r\n");
else
xil_printf("OV5640 detected failed!\r\n");
vd_mode = VMODE_1280x720;
//配置VDMA
run_vdma_frame_buffer(&vdma, VDMA_ID, vd_mode.width, vd_mode.height,
frame_buffer_addr,0,0,BOTH);
//初始化Display controller
DisplayInitialize(&dispCtrl, DISP_VTC_ID, DYNCLK_BASEADDR);
//设置VideoMode
DisplaySetMode(&dispCtrl, &vd_mode);
DisplayStart(&dispCtrl);
Gpio_Init();
while(1){
XGpioPs_WritePin(&Gpio, LED3, !XGpioPs_ReadPin(&Gpio, LED3));
sleep(1);
}
return 0;
}