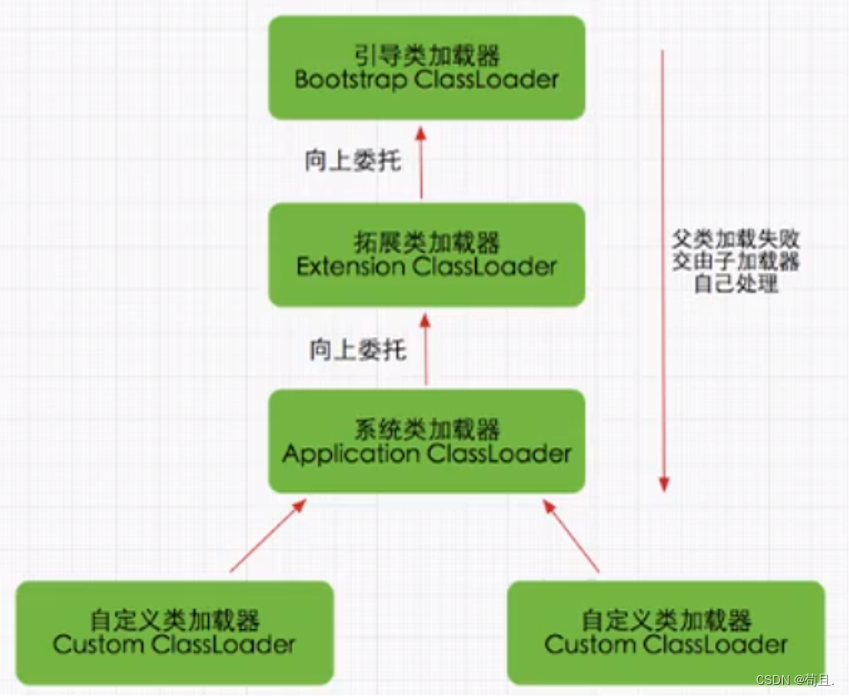
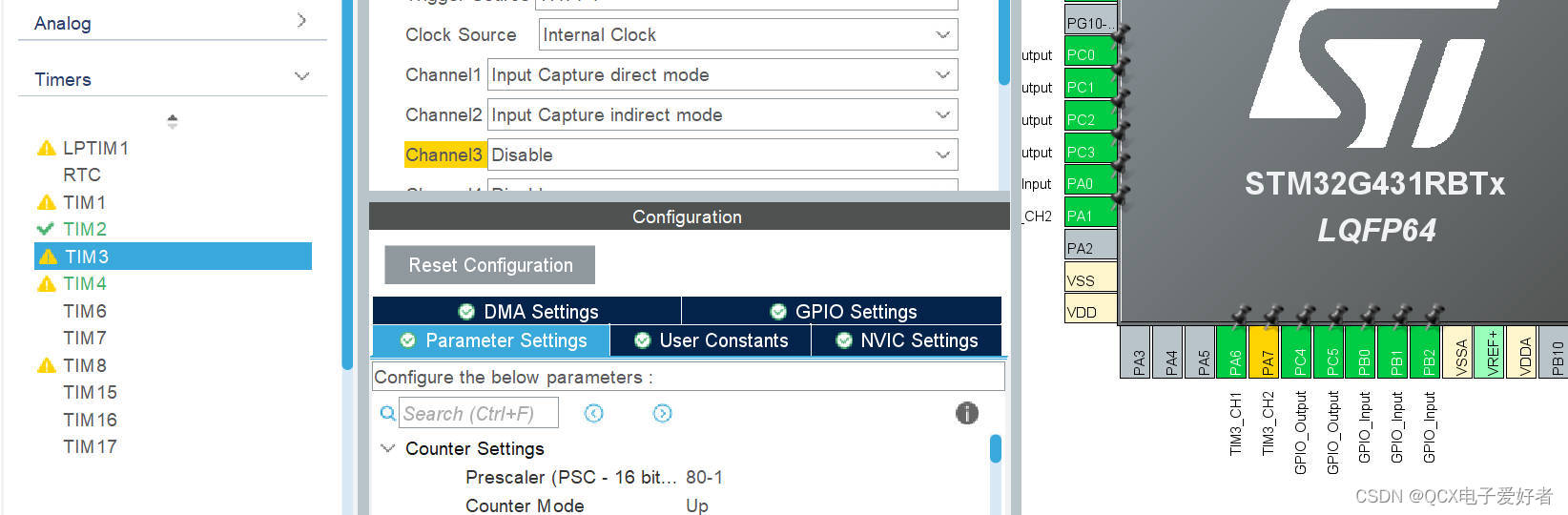
1.CUBEMAX配置
测量PA6,PA7输出的占空比,只需要把主要的配置,配置为A6口就行,A7口黄色表示配置不正确,不用管。
2.软件代码
TIME.c中找到TIM3的初始化,在后面初始化A7口
void MX_TIM3_Init_PA7(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 80-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI2FP2;//第一个地方
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;//第二个地方
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;//第三个地方
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;//第四个地方
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;//第五个地方
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}循环函数中
static uint32_t time10ms;
static uint8_t time3_sta=0;
if(uwTick-time10ms>10)
{
time10ms=uwTick;
if(time3_sta==0)//PA6
{
duty1=(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1)*100.0f/(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1);
MX_TIM3_Init_PA7();
HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_2);
}
if(time3_sta==1)//PA7
{
duty2=(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1)*100.0f/(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1);
MX_TIM3_Init();
HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_2);
}
time3_sta=!time3_sta;
}