文章目录
9.12 DenseNet
9.13 图像分割的数据集
9.13.1 PASCAL VOC
9.13.2 MS COCO
9.13.3 Cityscapes
9.14 全景分割
9.12 DenseNet
这篇论文是CVPR2017年的最佳论文。
卷积神经网络结构的设计主要朝着两个方向发展,一个是更宽的网络(代表:GoogleNet、VGG),一个是更深的网络(代表:ResNet)。但是随着层数的加深会出现一个问题——梯度消失,这将会导致网络停止训练。到目前为止解决这个问题的思路基本都是在前后层之间加一个identity connections(short path)。
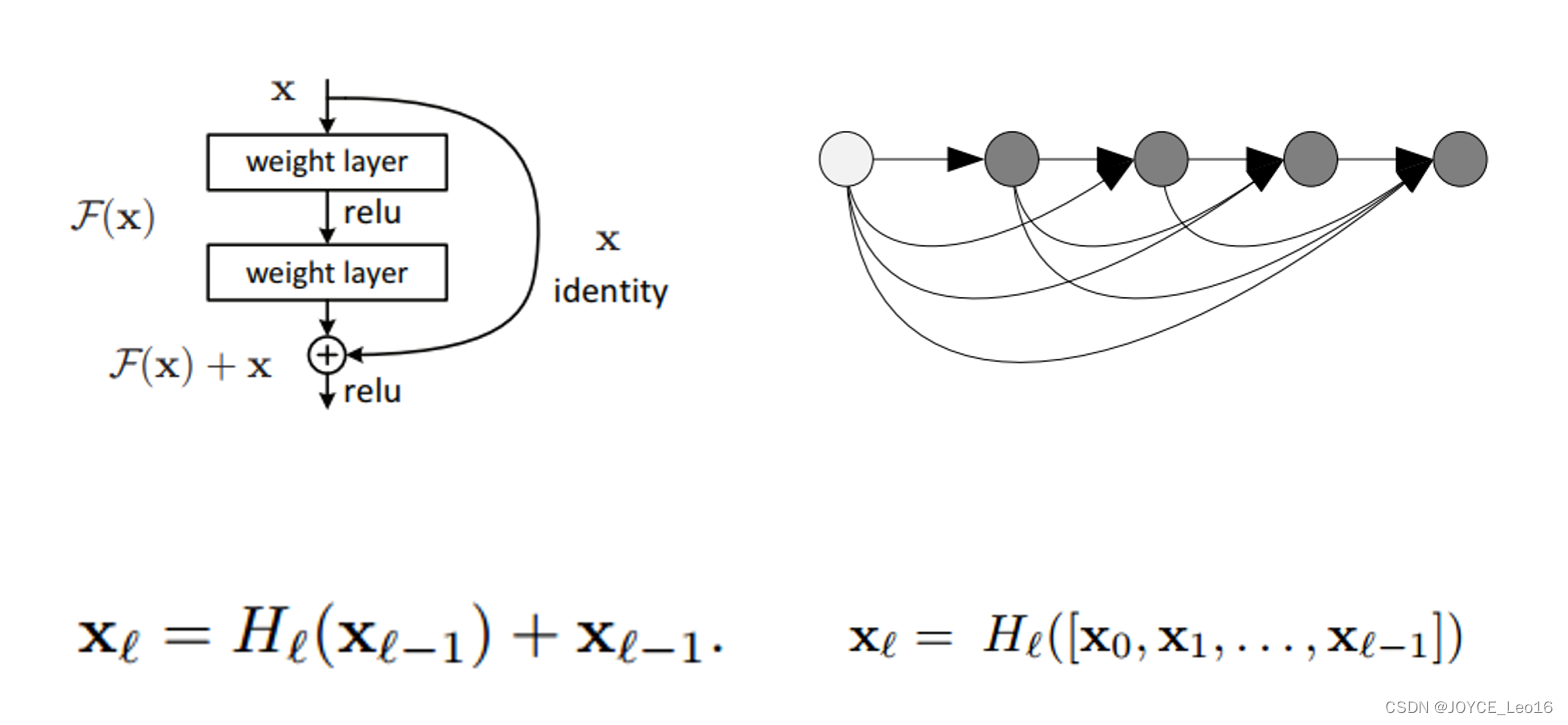
由上图中可知Resnet是做值的相加(也就是add操作),通道数是不变的。而DenseNet是做通道的合并(也就是Concatenation操作),就像Inception那样。从这两个公式就可以看出这两个网络的本质不同。此外DensetNet的前面一层输出也是后面所有层的输入,这也不同于ResNet残差网络。
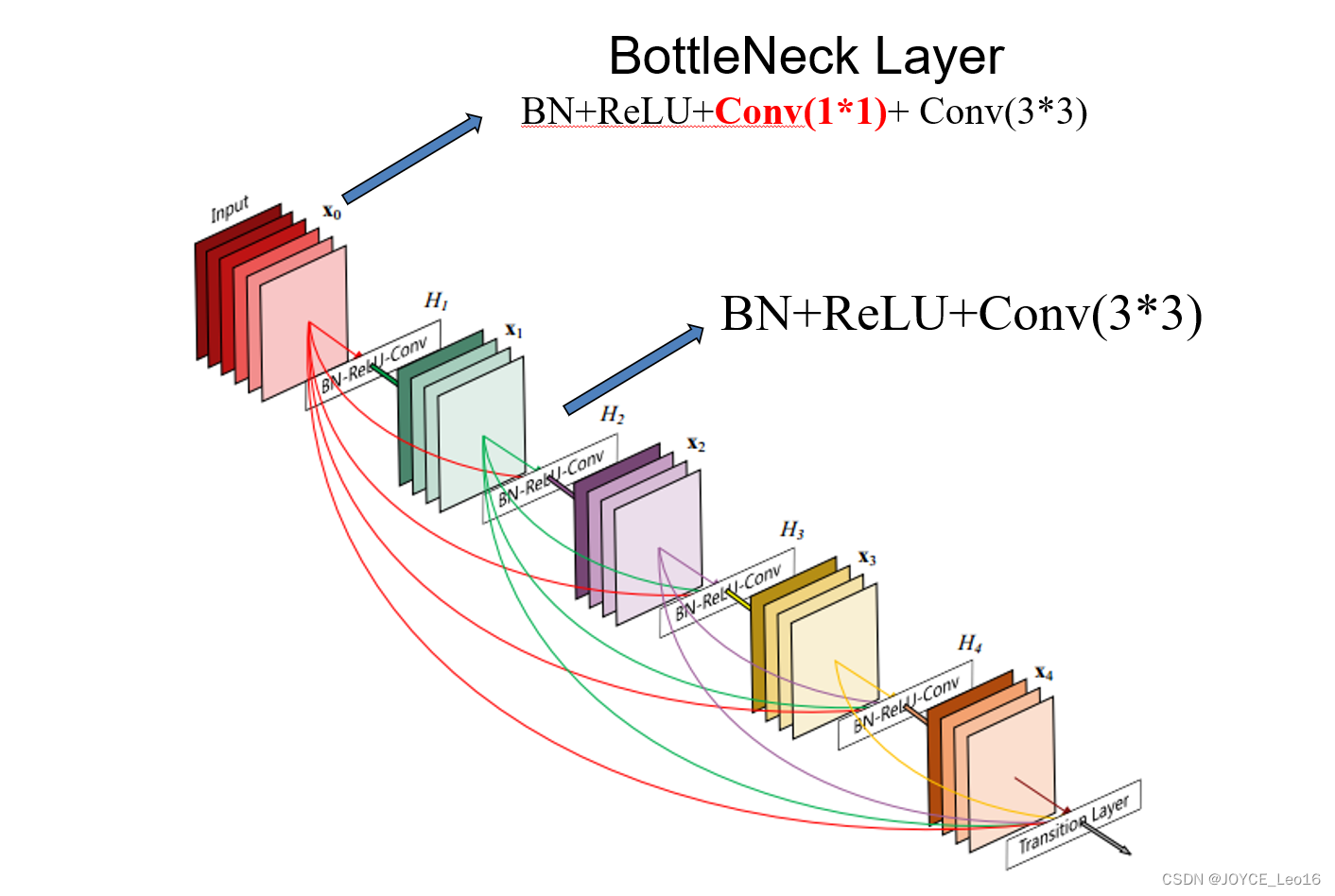
DenseNet的Block结构如上图所示。
1*1卷积核的目的:减少输入的特征图数量,这样既能降维减少计算量,又能融合各个通道的特征。我们将使用BottleNeck Layers的DenseNet表示为DenseNet-B。(在论文的实验里,将1×1×n小卷积里的n设置为4k,k为每个H产生的特征图数量)。
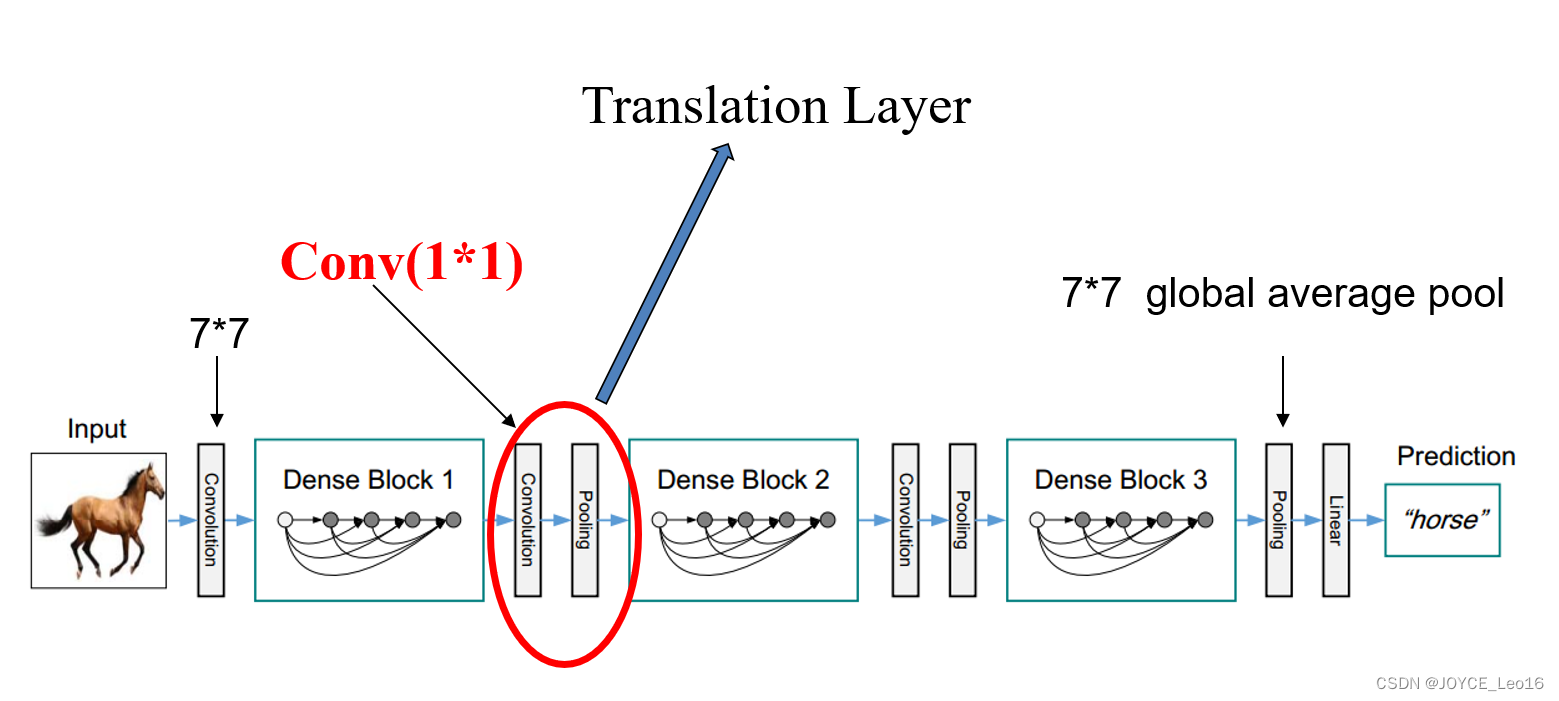
上图是DenseNet网络的整体网络结构示意图。其中1*1卷积核的目的是进一步压缩参数,并且在Transition Layer层有个参数Reduction(范围是0到1),表示将这些输出缩小到原来的多少倍,默认是0.5,这样传给下一个Dense Block的时候channel数量就会减少一半。当Reduction的值小于1的时候,我们就把带有这种层的网络称为DenseNet-C。
DenseNet网络的优点包括:
- 减轻了梯度消失
- 加强了feature的传递
- 更有效地利用了feature
- 一定程度上较少了参数数量
- 一定程度上减轻了过拟合
9.13 图像分割的数据集
9.13.1 PASCAL VOC
VOC 数据集分为20类,包括背景为21类,分别如下:
- Person: person
- Animal: bird, cat, cow, dog, horse, sheep
- Vehicle: aeroplane, bicycle, boat, bus, car, motorbike, train
- Indoor: bottle, chair, dining table, potted plant, sofa, tv/monitor
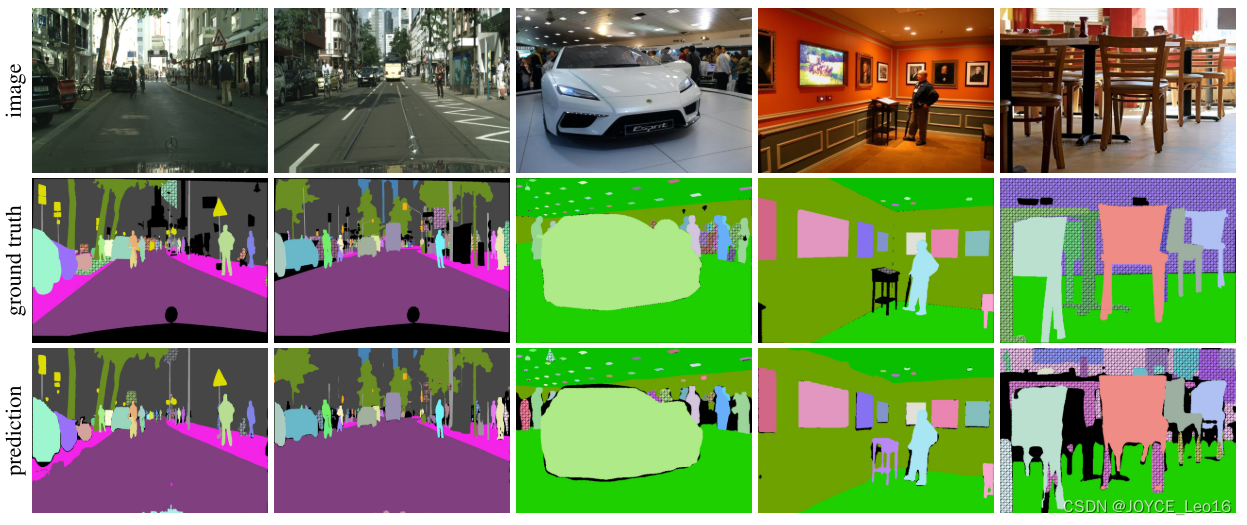
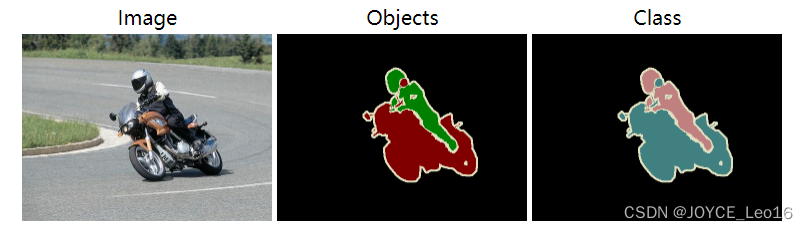
VOC 数据集中用于分割比赛的图片实例如下,包含原图以及图像分类分割和图像物体分割两种图(PNG格式)。图像分类分割是在20种物体中,ground-turth图片上每个物体的轮廓填充都有一个特定的颜色,一共20种颜色。
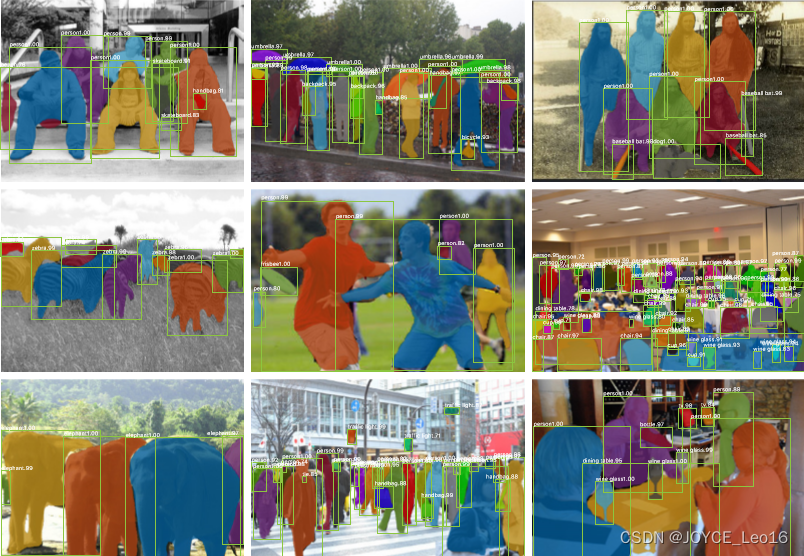
9.13.2 MS COCO
MS COCO 是最大图像分割数据集,提供的类别有 80 类,有超过 33 万张图片,其中 20 万张有标注,整个数据集中个体的数目超过 150 万个。MS COCO是目前难度最大,挑战最高的图像分割数据集。
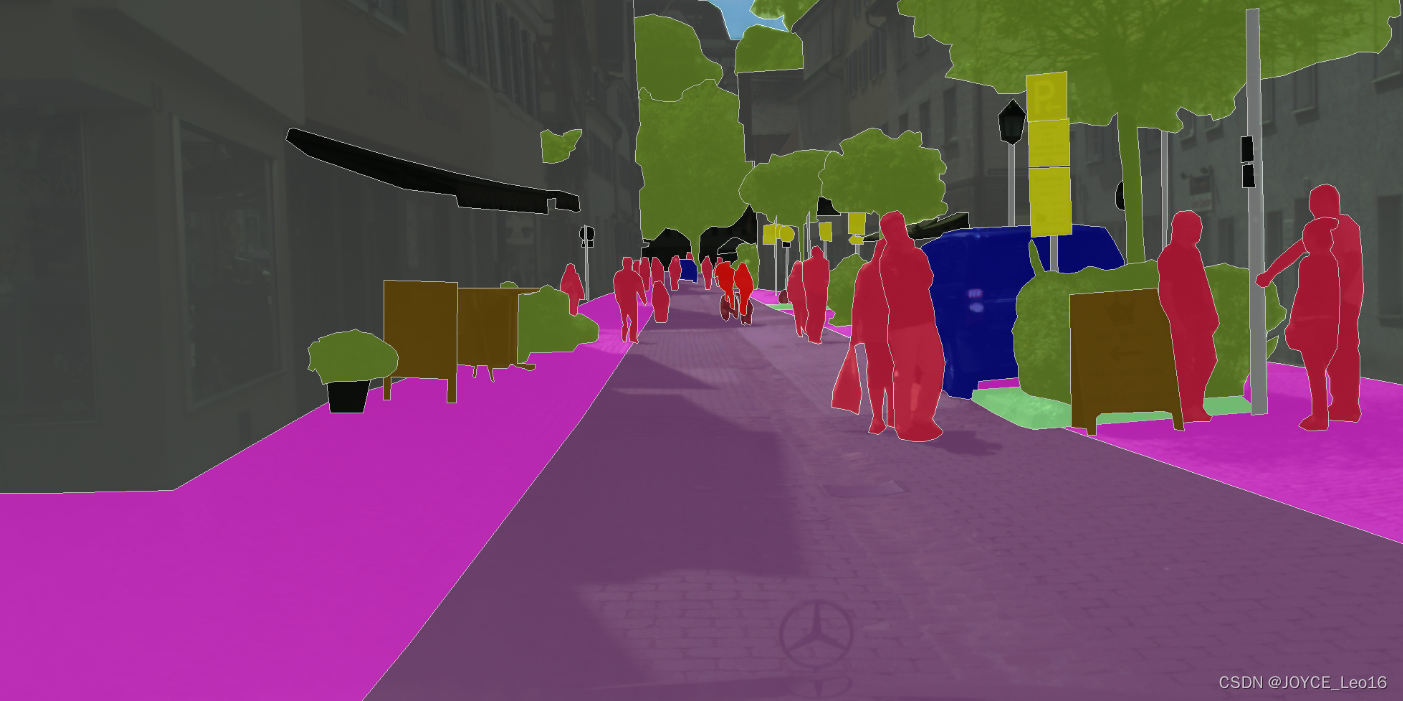
9.13.3 Cityscapes
Cityscapes 是驾驶领域进行效果和性能测试的图像分割数据集,它包含了5000张精细标注的图像和20000张粗略标注的图像,这些图像包含50个城市的不同场景、不同背景、不同街景,以及30类涵盖地面、建筑、交通标志、自然、天空、人和车辆等的物体标注。Cityscapes评测集有两项任务:像素级(Pixel-level)图像场景分割(以下简称语义分割)与实例级(Instance-level)图像场景分割(以下简称实例分割)。
9.14 全景分割
全景分割的开山之作:何恺明的Panoptic Segmentation
1. Introduction
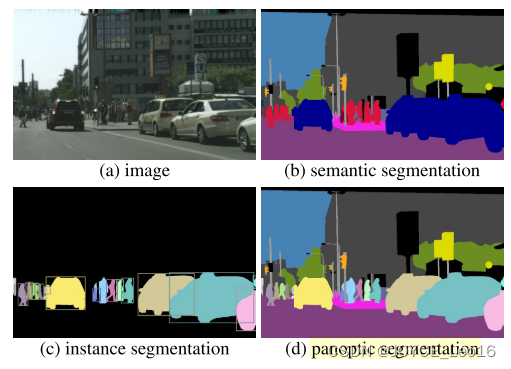
语义分割通过带孔全卷积网络,根据不同的stuff进行划分;实例分割则是在目标检测的基础上基于检测框进行物体的分割。缺少一种框架可以将两者进行融合实现既能分割背景又能分割实例,而这在自动驾驶和AR技术中大有作为。由此提出的全景分割任务能将两者进行结合。
全景分割的思路很直观:为图像的每个像素分配语义label和类内实例id,前者用于区分语义信息,后者用于分割实例(因此stuff不具有实例id)。提出全景分割时,只是启发式地将语意分割和实例分割两种任务的输出进行后处理的融合(如NMS),并以此建立PS任务的baseline。为了评价全景分割的质量,提出panoptic quality (PQ) 标准,将背景和物体的评价纳入一个完整的框架下。示意图如下:
2. Panoptic Segmentation
-
Task format
全景分割的标注方法:
像素级的标注,标出类别label和类内实例id。如果某像素的这两个信息都能匹配,则可以将该像素匹配到某个类别和实例中去;类外的像素可以分配空标签,即并不是所有的像素都要有语义类别。 -
Stuff and thing labels
对于stuff和thing(背景填充和物体实例)的标签,交集是空集,并集是所有可能的label空间。这两者是互相独立不相关的(很好理解,像素属于那个类和它属于哪个物体不具有相关性)。 -
Relationship
都是像素级的label,需要为每个像素分配对应的标签。但是实例分割基于region的,允许重叠的segmentation,而全景分割和语义分割一样是像素级的label,不允许重叠标签的出现。 -
Confidence scores
这一点上更像语义分割而不是实例分割,对于PS不需要置信分数评价分割质量。提到这个,作者认为语义分割和全景分割可以直接利用人工标注的label进行对比从而评价当前mask的质量;而实例分割在选择mask时评价的是分类置信度,这个并没有人工标注进行参考,因此难以把握。
3. Panoptic Segmentation Metric
用于衡量全景分割效果的指标应具有:完备性;可解释性;简洁性。由是提出了PQ指标,可分为两步:分割匹配、在匹配上进行计算PQ。
3.1 Segment Matching
定义match:预测的segmentation和gt的iou大于0.5,说明两者can match。再结合全景分割的不可重叠性,不难得到:最多只有一个预测的segmentation可以match gt。
3.2 PQ Computation
PQ的计算类似mAP,也是类内求取,然后求类间的平均值,以便不敏感类别不平衡。对于每一类,可以根据gt与预测的segmentation分为三类,下图描述:
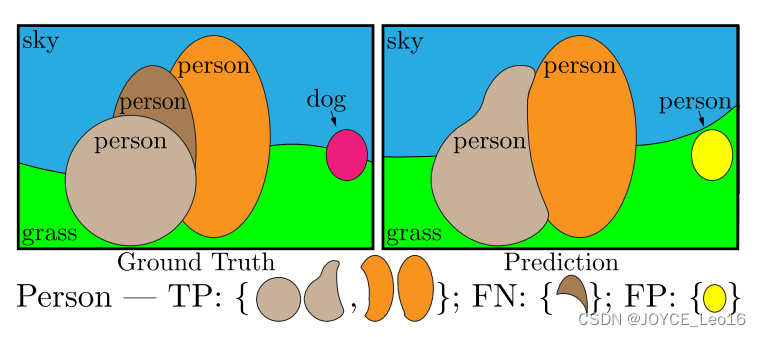
TP: 预测为正,实际为正,描述match较好的
FP: 预测为正,实际为负,描述match错的
FN: 预测为负,实际为正,描述没match出来的gt

通过上述三类可以计算得到PQ值公式:
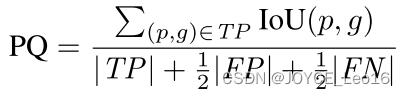
式中出去FP与FN后,剩下的式子描述的是match的segmentation的平均IoU,加上FP与FN是为了惩罚match失败的分割实例。
有意思的是,对上述式子进行简单的恒等变化:
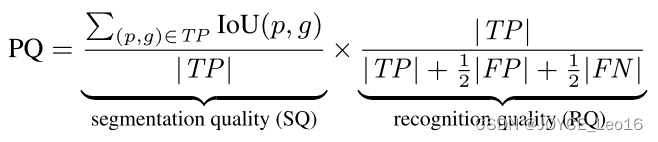
第一项评价的是match分割的质量,第二项类似于F1得分。因此可以PQ分解为:
-
Void labels
gt中可能出现两种像素标注为空的情况:超出类别的像素和模糊不清的像素(难以分类)。在评估结果时,这些空的标签不予以评估。具体而言:
(1)在matching部分,预测出为void的像素会被移出prediction并不参与IoU计算;
(2)matching后,unmatched prediction按照一般情况会计算FP FN,但是对于空标签情况,如果该prediction含有的void像素块超过一定匹配阈值就会被移除,并不算作FP计算得分。
-
Group labels
有时区分相同语义类别的实例个体标注比较困难,因此有提出组标签的标注方法。但对于PQ计算而言:
(1)matching部分不使用组标签,而是严格区分实例
(2)matching后,对于包含一部分相同类别像素点的unmatched predicted segments,这一部分将被去除并不视作false positives
3.3 Comparison to Existing Metrics
-
Semantic segmentation metrics
衡量语义分割的标准有像素级精度,平均精度,IoU。但是其只专注于像素级的划分,不能反映物体实例级别的分割性能。 -
Instance segmentation metrics
度量为AP,主要是引入了置信度分数confidence score对检测目标进行打分。(两者不是完全的隔绝,实例分割也有用IoU监督的,而confidence score是否能够反映mask的真实质量也有存疑过,这个标准也不是固定的) -
Panoptic quality
PQ的度量可以分解成SQ和RQ,SQ反映了语义分割的像素级IoU性能,RQ专注于检测识别的效果,因此将两者统一到一个框架下。
分割效果: