**
玩转Matlab-Simscape(初级)- 05 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(理论部分1)
**
目录
- 玩转Matlab-Simscape(初级)- 05 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(理论部分1)
- 前言
- 一、COMSOL Multiphysics with Simulink介绍
- 1.1 Simulink与COMSOL联合仿真简介
- 1.2 使用COMSOL启动Simulink
- 1.3 协同仿真
- 1.4 状态空间系统
- 1.5 自定义设置
- 二. 协同仿真工作流程
- 2.1 仿真开始前注意点
- 2.2 Comsol中协同仿真工作流
- 2.2.1 配置和导出协同仿真文件
- 2.3 在Simulink中添加协同仿真块
- 2.3.1 在Simulink库浏览器中,找到COMSOL联合仿真块,拖进Simulink图中。
- 2.3.2 在Simulink图中,要进入COMSOL联合仿真块设置窗口,双击该块。
- 2.4 运行仿真后
- 2.4.1 保存模型
- 2.4.2 在COMSOL软件中编辑模型
- 总结
前言
学完《玩转Matlab-Simscape(初级)》系列博客的前三节 ,我发现应用Maltab simscape对多体进行仿真时,如果要研究的对象是一个刚体系统,进行动力学的分析还是相对好处理的,但如果3D模型再复杂些,研究的结构中个别组件为柔性体(即对一个复杂刚柔耦合系统的控制进行仿真),在Matlab Simscape中进行分析,现阶段对我来说貌似有些困难,所以,今天我跳转介绍下COMSOL Multiphysics with Simulink。该部分主要想解决后续可能遇到的复杂3D刚柔耦合控制系统的仿真问题。
本文通篇概述基于Solidworks、Matlab Simulink、COMSOL进行协同仿真的理论基础部分。欢迎各位小伙伴关注、赞赞、留言和收藏。
(Matlab的这种刚柔耦合控制仿真分析模块我还没学习到,待掌握了解后跟此文方法会做个对比研究。😄)
一、COMSOL Multiphysics with Simulink介绍
1.1 Simulink与COMSOL联合仿真简介
- 任何时间相关的或静态的COMSOL模型都可以与Simulink一起用于联合仿真;
- 基于COMSOL模型导出状态空间模型为总自由度(DOFs)的线性化模型,是模态降阶的线性化模型,对于某些物理场,需要有额外的模块,以便能够建立执行模态分析所需的模态研究;
1.2 使用COMSOL启动Simulink
方法1(windows系统):双击桌面图标或 “开始”→COMSOL Multiphysics 6.1→COMSOL
Multiphysics 6.1 with Simulink,这将打开MATLAB桌面以及COMSOL Multiphysics服务器。注意:不支持手动建立Simulink与COMSOL的连接。

注意:
-
- 如果没有出现上述“COMSOL Multiphysics 6.1 with Simulink”和“COMSOL Multiphysics 6.1 with Matlab”图标,可以如下处理:
①先安装Matlab软件再安装Comsol软件;②在安装comsol软件时,指定Matlab的安装根路径
- 如果没有出现上述“COMSOL Multiphysics 6.1 with Simulink”和“COMSOL Multiphysics 6.1 with Matlab”图标,可以如下处理:
-
- 如果comsol不能与simulink建立联结,可以右键“COMSOL Multiphysics 6.1 with Simulink”图标属性,在“目标”中输入如下字段:
<COMSOL_ROOT>\bin\win64\comsolmphserver.exe Simulink -mlroot <MATLAB_ROOT>
其中,
<COMSOL_ROOT>是COMSOL安装根目录,例如D:\Program Files\Comsol\COMSOL61\Multiphysics,
<MATLAB_ROOT>是MATLAB安装根目录,如例D:/Program files/MATLAB/R2010b。
- 如果comsol不能与simulink建立联结,可以右键“COMSOL Multiphysics 6.1 with Simulink”图标属性,在“目标”中输入如下字段:
1.3 协同仿真
协同仿真是一种将两个或多个独立的仿真软件程序集成在一起,使它们能够执行联合仿真的方法。在用Simulink对COMSOL模型进行联合仿真时,Simulink负责整个时间步进,并控制如何以及何时执行Simulink模型中所有模块的模拟。
注意:COMSOL模型的模拟是由模型中定义的COMSOL求解器执行的。因此,COMSOL求解器确定在通信步长t到t + dt期间,COMSOL内部执行哪种类型的时间步长。通常,COMSOL会选择在通信步骤内采取小的时间步骤,以达到所需的精度。
1.4 状态空间系统
状态空间系统是线性动态系统,其输入u和输出y定义如下式:
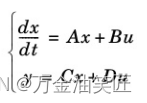
其中x为状态变量向量。上述动态系统的另一种表示是:
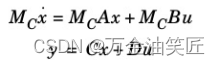
后一种形式更适合于大型系统,因为矩阵MC和MCA通常会变得比A稀疏得多。
在COMSOL中,可以选择使用降阶模型对系统进行线性化,也可以选择从完整模型中组装线性化的矩阵。模型约简仅限于支持特征值分析的物理接口。多物理场问题可能不适合降阶模型。状态空间矩阵的装配操作必须在COMSOL模型中完成。
直接提取全阶系统的状态空间矩阵是降阶建模的替代方案,因为状态空间系统不限于特定的物理接口,只要使用合适的线性化点,就可以用于多物理场问题。得到的矩阵具有模型的自由度数的大小,这可能会导致非常大的矩阵。状态空间矩阵的装配操作必须在COMSOL模型中完成。
1.5 自定义设置
要更改与联合仿真相关的设置,通过在MATLAB命令窗口中运行命令mphsimsettings打开e Settings — LiveLink for Simulink窗口。
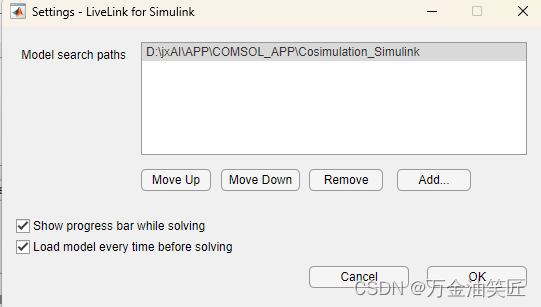
如果COMSOL模型文件(MPH)与cosimulation文件放在同一目录下,COMSOL将能够自动找到COMSOL模型文件。如果无法将模型文件与协仿真文件放在同一位置,则必须点击Add按钮并选择所需的文件夹,手动将模型文件的路径添加到模型搜索路径列表中。
二. 协同仿真工作流程
2.1 仿真开始前注意点
-
- 用于协同仿真的“研究”只能是一个“研究步”,要么是瞬态研究要么是稳态研究。一般常见的是瞬态研究。
-
- 瞬态研究和稳态研究中的参数扫描功能,以及稳态研究步中的载荷工况在协同仿真中均不支持。
-
- 自适应(如自适应网格细化,自适应误差估计)在协同仿真中也不支持。
-
- 在导出协同仿真文件前,必须将模型文件进行保存。
-
- 最好将模型文件与导出的协同仿真文件保存在同一目录中,这样协同仿真时会更容易使用。
-
- 在进行协同仿真时,确保模型求解的时间间隔和时间步长被用于求解。
-
- 确保模型用于求解的预期输入参数范围将用于协同仿真。
-
- 如果Simulink的时间单位是s,就无需检查COMSOL和simulink中的时间单位是否相同。
-
- 输入和输出的单位变换没有表示,因此,所有变换的值都在COMSOL模型单元里。当使用探针指定输出值时,探针会包含用于转换的单位设置。
-
- 当与Simulink进行联合仿真时,位于离散通信点处的参数会突变。某些情况下,这种突变相对于仅在COMSOL中进行仿真,使时间步对于求解器更具挑战。
-
- 考虑到输入值的变化,将不得不更新求解器的设置。如果参数直接控制场变量,一般需要进行手动缩放。
-
- 为了精确地描述系统的动力学行为,一般模型中的物理场定义需要更新。尤其是当将模型从稳态求解转变为瞬态求解时,这点尤其重要。例如,你可能必须引入影响动力学行为的阻尼或其他材料设置 。
2.2 Comsol中协同仿真工作流
-
- 搭建并保存COMSOL模型,确认模型求解无问题。
-
- 将Cosimulation for Simulink特征节点添加到Comsol模型中。用于定义协同仿真模型的输入、输出和求解。
-
- 从Cosimulation for Simulink特征节点导出协同仿真文件,最好保存在.mph文件(comsol模型文件)的存放路径中。(详见2.2.1部分)
-
- 在Simulink中创建或加载仿真图,并添加COMSOL联合仿真模块。
-
- 双击COMSOL 联合仿真模块,输入第3步从COMSOL Multiphysics软件导出的Cosimulation文件名称。
-
- 在Simulink中运行cosimulation。
-
- 可选择保存模型,在COMSOL 软件中进行后处理。
2.2.1 配置和导出协同仿真文件
导出操作如下:
方法一:在Comsol 软件“研究”选项卡下,点击选择“Cosimulation for Simulink”。
方法二:右键单击“全局定义”,选择“Cosimulation for Simulink”
导出的协同仿真文件只包含有关Simulink应该如何与COMSOL模型接口的信息。协同仿真文件本身不包含模型,
模型仅保留在COMSOL mph文件中。
-
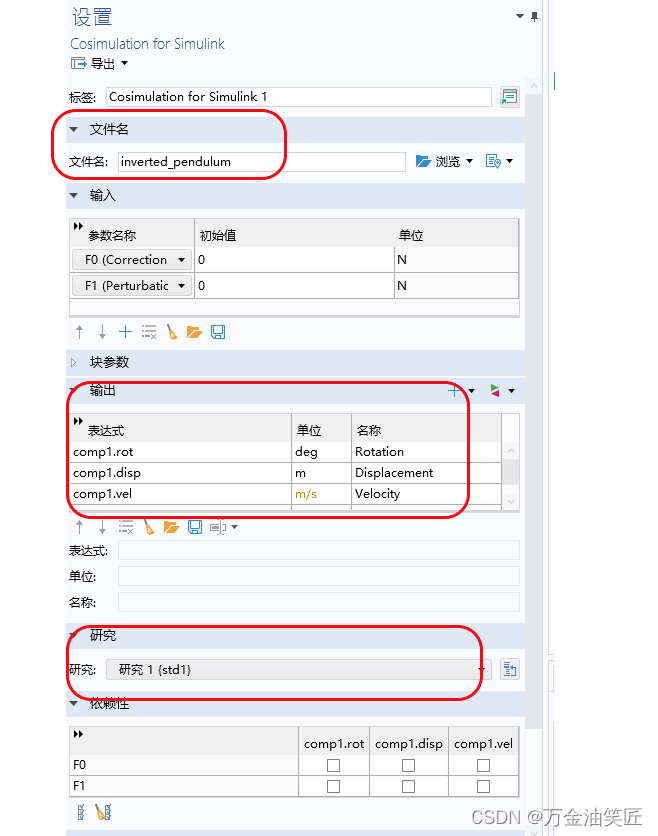
- 在Cosimulation for Simulink 设置窗口中的Filename页,输入要导出的cosimulation文件的名称。
-
- 适当的cosimulation文件应设置至少一个输出表达式和一个支持的研究步骤。
-
- 点击导出,生成fmu格式的协同仿真文件。
**注意:**在导出联合仿真文件之前,先保存应用程序mph文件设置模型名称。
- 点击导出,生成fmu格式的协同仿真文件。

配置操作如下:
-
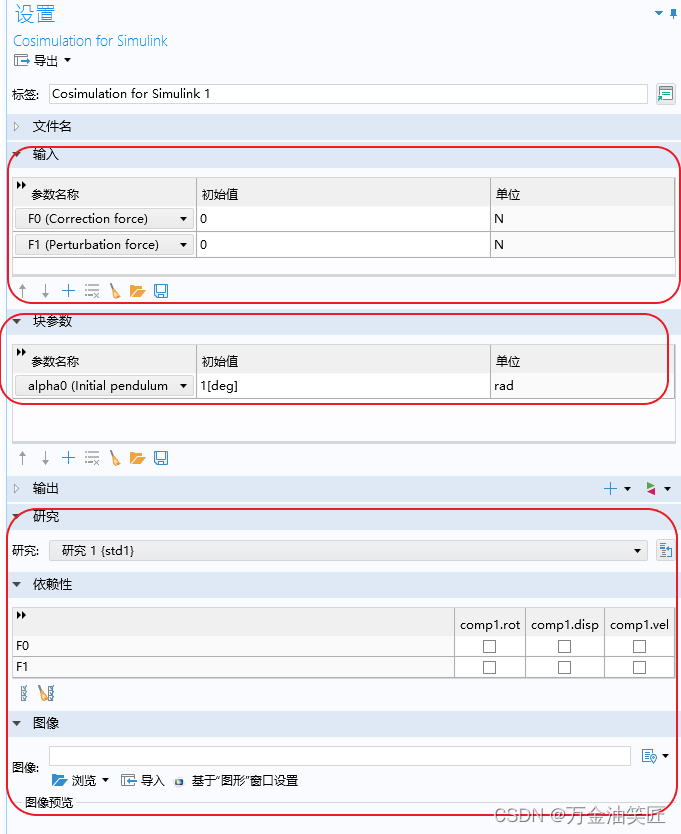
- 在“输入”设置部分
①可以在Cosimulation for Simulink 设置窗口中指定输入变量及其顺序。输入变量可以在每次通信时在模型中修改和更新。在Parameter name列中,列表中除了包含已经设置为全局参数的参数外,还有在模型中定义的全局参数。
**注意:**不支持定义几何或网格设置的参数作为输入。
②在初始值单元格中输入要在初始时间步设置的值。
- 在“输入”设置部分
-
- 在“块参数”设置部分
可以指定要在Simulink 模块中更改的参数,但这些参数仅在协同仿真初始化期间计算。在“参数名称”列中,从列表中选择一个参数。对块参数定义的设置没有限制。
- 在“块参数”设置部分
-
- 在“研究”设置部分
指定在协同仿真中运行的研究,以及如何将解存储在COMSOL模型中
*. 4. “依赖性”设置部分
使用单选按钮指定输入参数和输出表达式之间的任何直接依赖关系。该信息包含在导出的联合仿真文件中,以便通知Simulink模型中的直接馈通。
- 在“研究”设置部分
-
- “图像”设置部分
对加载到Simulink中的COMSOL 协同仿真模块,为方便识别模型,可以对模块填充图像
- “图像”设置部分
2.3 在Simulink中添加协同仿真块
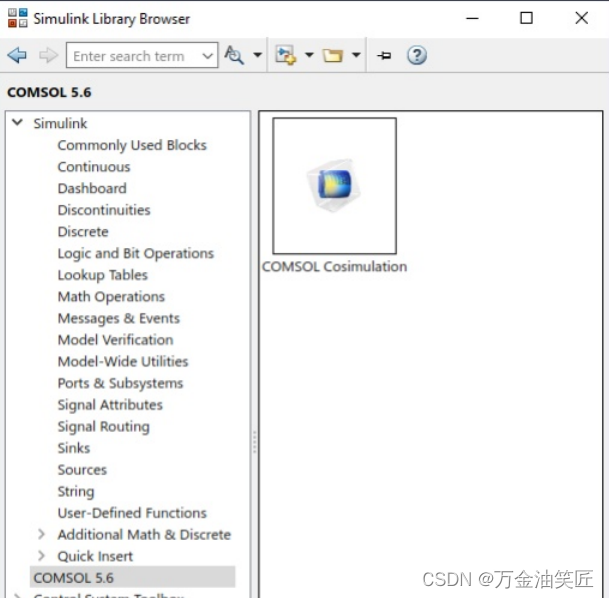
2.3.1 在Simulink库浏览器中,找到COMSOL联合仿真块,拖进Simulink图中。
2.3.2 在Simulink图中,要进入COMSOL联合仿真块设置窗口,双击该块。
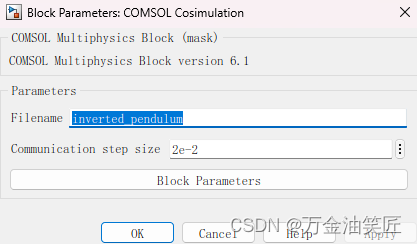
①在“Filename”字段中输入cosimulation的文件名。
②在“Comunication step size”中,您输入两个程序相互通信的时间间隔。
③要修改在comsol协同仿真文件导出过程中设置的默认值,则单击块参数“Block Parameters”。
2.4 运行仿真后
运行仿真后,可以根据COMSOL协同仿真模块和Simulink图中其他模块的输入、输出,从Simulink中提取数据,也可以在COMSOL中对存储的解决方案数据进行后处理。
2.4.1 保存模型
在执行协同仿真时,模型存储在COMSOL Multiphysics服务器的内存中。使用MATLAB中的命令行可以访问该模型并与之交互。
mphsave(<FILENAME>)
其中是要保存的COMSOL模型的名称。该模型可通过COMSOL Multiphysics加载,便于后续进一步分析。
2.4.2 在COMSOL软件中编辑模型
为了更快地进行分析,可以使用命令mphlaunch。该命令启动COMSOL Multiphysics,将其连接到用于联合仿真的COMSOL Multiphysics服务器,并将模型加载到用户界面中。此时,COMSOL中可用的所有后处理功能都可以用于分析模型。
当以这种方式打开COMSOL Multiphysics时,模型将被COMSOL用户界面锁定。因此,在Simulink中运行另一个联合仿真之前,需要关闭COMSOL用户界面。
总结
以上就是今天分享的关于COMSOL Multiphysics with Simulink 的理论基础内容第一部分,简单分享了在Comsol和Simulink中搭建模型工作流,迎各位小伙伴关注、赞赞、留言和收藏。