接着前一部分数据聚类方法的介绍,由于K-means和GMM方法都是基于欧式距离信息处理的,两者分别以圆形和椭圆形来作为数据的聚类分割方式,这种情况下会导致环形图和月牙图数据分割不准确,因此进一步的介绍一种谱聚类方法,该方法是基于图论的,关注的是数据与数据之间的连接性,聚类分割效果相对更好。并且除了谱聚类外,也会对 Mean-shift 和 DBSCAN 方法进行简单介绍。
这里推荐一篇关于讲解谱聚类方法的博客:一文带你深入浅出地搞懂谱聚类
1. Spectral clustering(谱聚类)
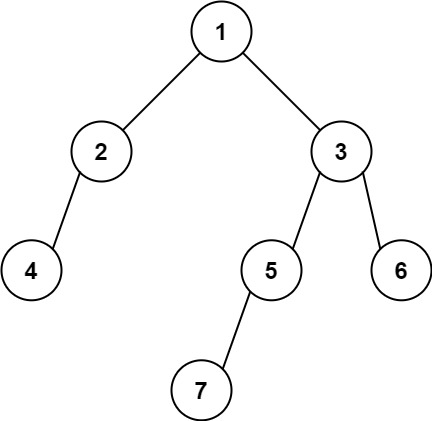
谱聚类的思想来源于图论,谱指的是矩阵的特征值。它将待聚类数据集中的每一个样本看做是图中的一个顶点,顶点与顶点相连的边上有权重,权重的大小表示样本之间的相似程度。同一类的顶点之间相似性较高,在图论中体现为同一类的顶点之间连接边的权重较大,而不同类的顶点之间连接边的权重较小。基于这样的特性,谱聚类方法的目标就是找到一种切割图的方法,使得切割之后各个子图内的权重很大,子图间的权重很小。
如上图所示,
W
i
j
W_{ij}
Wij表示的就是一条权重比较小的边,对应于连接不同类顶点之间的权重较小,此时在右图中关于
W
i
j
W_{ij}
Wij做切割时就可以得到如左图所示的两个类。
1.1 算法流程
假设给定一个样本集
X
=
{
x
1
,
x
2
,
.
.
.
,
x
n
}
X=\{ x_1,x_2,...,x_n \}
X={x1,x2,...,xn},其中每一个样本
x
i
∈
R
m
x_i \in R^m
xi∈Rm,那么如何使用谱聚类方法将它们划分为 k 类呢?
主要流程如下:(以非标准化的Laplacian矩阵为例)
- 将样本集作为顶点集建图,并构建顶点间的邻接矩阵 W ∈ R n × n W \in \Reals^{n \times n} W∈Rn×n
- 构建度与度矩阵(Degree Matrix)D
- 计算 Laplacian 矩阵 L
- 计算 L 矩阵特征值最小的 k 个特征向量 v 1 , v 2 , . . . , v k o f L v_1,v_2,...,v_k \space\space of \space L v1,v2,...,vk of L
- 将 k 个特征向量构成新的矩阵 V ∈ R k V \in \Reals^k V∈Rk,V 矩阵的每一行 y i ∈ R k , i = 1 , 2 , . . . , n y_i \in \Reals^k,i=1,2,...,n yi∈Rk,i=1,2,...,n可以看做是对应 x i x_i xi降至 k 维空间后的形式;
- 使用k-means方法将 数据
{
y
i
∈
R
k
}
\{ y_i \in \Reals^k \}
{yi∈Rk}划分为 k 类;
1.1.1 邻接矩阵 W 构建
对于一副无向图 G=(V, E) ,V表示顶点的集合,E表示边的集合,通常有两个比较重要的概念:图的邻接矩阵 和 顶点的度。所有顶点之间的权重组成一个 n x n 的矩阵,称为邻接矩阵,也叫权重矩阵,即:
W
=
[
w
11
w
12
⋯
w
1
n
w
21
w
22
⋯
w
2
n
⋮
⋮
⋱
⋮
w
n
1
w
n
2
⋯
w
n
n
]
W= \begin{bmatrix} w_{11} & w_{12} & \cdots & w_{1n} \\ w_{21} & w_{22} & \cdots & w_{2n} \\ \vdots& \vdots & \ddots & \vdots \\ w_{n1} & w_{n2} & \cdots & w_{nn} \end{bmatrix}
W=
w11w21⋮wn1w12w22⋮wn2⋯⋯⋱⋯w1nw2n⋮wnn
对于无向图,顶点
v
i
v_i
vi和
v
j
v_j
vj之间的权重
w
i
j
w_{ij}
wij和顶点
v
j
v_j
vj和
v
i
v_i
vi之间的权重
w
j
i
w_{ji}
wji是一样的,即
w
i
j
=
w
j
i
w_{ij}=w_{ji}
wij=wji,因此 W 矩阵为对称矩阵,即
W
=
W
T
W=W^T
W=WT。这里简单介绍三种相似矩阵的构建方法:
- ε \varepsilon ε- 近邻法
该方法使用欧式距离
d
(
v
i
,
v
j
)
d(v_i,v_j)
d(vi,vj)计算两个顶点之间的距离,然后设定一个阈值
ε
\varepsilon
ε,使得:
w
i
j
=
{
0
,
if
s
i
j
>
ε
d
(
v
i
,
v
j
)
,
if
s
i
j
≤
ε
w_{ij} = \begin{cases} 0, & \text{if $s_{ij} > \varepsilon$ } \\ d(v_i,v_j), & \text{if $s_{ij} \le \varepsilon$ } \end{cases}
wij={0,d(vi,vj),if sij>ε if sij≤ε
一般来说,距离越近即相似性越高,因此可以考虑选择
w
i
j
=
m
a
x
(
d
(
v
i
,
v
j
)
)
−
d
(
v
i
,
v
j
)
w_{ij}=max(d(v_i,v_j))-d(v_i,v_j)
wij=max(d(vi,vj))−d(vi,vj)来保证距离值和权重之间的一致性。
- k - 近邻法
该方法选取当前顶点的 k 个近邻点,该顶点与这 k 个顶点的权重都大于 0,但需要注意的是,如果点 v i v_i vi在点 v j v_j vj的 k 个近邻点中,不一定能够保证 v j v_j vj也在 v i v_i vi的 k 个近邻点中,这样得到的相似矩阵无法满足对称的要求。因此需要对相似矩阵的构建方法进行限制,常用的方式有两种:
- 方式一:顶点 v i v_i vi和顶点 v j v_j vj只要其中一个点在另一个点的 k 个近邻中,就令 w i j = w j i w_{ij}=w_{ji} wij=wji,如果两个都不满足对方的 k 近邻关系,则令 w i j = w j i = 0 w_{ij}=w_{ji}=0 wij=wji=0,因此:

- 方式二:顶点 v i v_i vi和顶点 v j v_j vj**必须同时满足双方的 k 近邻关系时,**才令 w i j = w j i w_{ij}=w_{ji} wij=wji,否则,只要有一方不在另一方的 k 个近邻中,就令 w i j = w j i = 0 w_{ij}=w_{ji}=0 wij=wji=0,因此:

- 全连接法
该方法将所有的顶点都连接起来,然后通过度量空间中某种对称度量算子来计算顶点之间的相似度。比如使用顶点之间的欧式距离,同时为了保证距离越近相似度越高,即权重越大的特性,可以采用如下方式进行表示:
w
i
j
=
w
j
i
=
m
a
x
(
d
(
v
i
,
v
j
)
)
−
d
(
v
i
,
v
j
)
w_{ij}=w_{ji}=max(d(v_i,v_j))-d(v_i,v_j)
wij=wji=max(d(vi,vj))−d(vi,vj)
1.1.2 度与度矩阵 D 构建
在数据结构中,度是指与该顶点直接连接的顶点的个数。如果相似性矩阵 W 是表示顶点间连接关系的二值矩阵,那么度矩阵的值与最初的定义一致。但进一步,如果相似性矩阵 W 中记录的是顶点和顶点所连边的权重,那么对于顶点
d
i
,
i
=
1
,
2
,
.
.
.
,
n
d_i,i=1,2,...,n
di,i=1,2,...,n,可以将度定义为该顶点所连边的权重之和,即
d
i
=
∑
j
−
1
n
w
i
j
d_i =\sum_{j-1}^n w_{ij}
di=j−1∑nwij 即对于第 i 个顶点
v
i
v_i
vi,其对应的度就是邻接矩阵 W 中第 i 行的和,即度矩阵 D 的形式如下:
给定顶点 V 的一个子集
A
⊂
V
A \sub V
A⊂V,将 顶点集V中子集A之外所有顶点组成的集合称为 A 的补集,记为
A
ˉ
\bar{A}
Aˉ。子集的大小有两种定义:
- 子集内顶点的个数,记作 ∣ A ∣ |A| ∣A∣
- 子集内所有顶点的度之和,记作
v
o
l
(
A
)
=
∑
v
i
∈
A
d
i
vol(A)=\sum_{v_i \in A}d_i
vol(A)=∑vi∈Adi
1.1.3 拉普拉斯矩阵 L 构建
拉普拉斯矩阵一般分为 非标准化的拉普拉斯矩阵 和 标准化的拉普拉斯矩阵,前者倾向于将聚类划分为数量相近的顶点集,而后者更倾向于将聚类划分为密度相近的顶点集。
-
非规范化的拉普拉斯矩阵
L = D − W L=D-W L=D−W
其中, D 对度矩阵,W 为相似矩阵。显然,由于 D 和 W 都是对称矩阵,所有两种组合后形成的 L 矩阵也是一个对称矩阵。 -
标准化的拉普拉斯矩阵
常见的标准化表达形式有两种, L s y m L_{sym} Lsym和 L r w L_{rw} Lrw,两者的定义形式如下: L s y m = D − 1 / 2 L D − 1 / 2 = I − D − 1 / 2 W D − 1 / 2 L_{sym}=D^{-1/2} L D^{-1/2} = I - D^{-1/2} W D^{-1/2} Lsym=D−1/2LD−1/2=I−D−1/2WD−1/2
L r w = D − 1 L = I − D − 1 W L_{rw}= D^{-1}L = I-D^{-1}W Lrw=D−1L=I−D−1W
其中, L s y m L_{sym} Lsym是一个对称矩阵,sym指的是symmertic的缩写;而 L r w L_{rw} Lrw不是对称矩阵,rw指的是random walk,是一种基于随机游走的拉普拉斯矩阵。
1.1.4 聚类个数 k 如何确定
谱聚类有一个比较好的特性就是:谱聚类的特征值中,较小的特征值对应的特征向量往往包含了图的主要结构信息。因此,可以观察特征值的分布,寻找一个“拐点”或“间隙”,即特征值突然变小的位置。这个位置之前的特征值数量可能对应着数据的聚类数量。
1.2 数学原理补充
这部分会简单说明一下引入拉普拉斯矩阵的原因及矩阵性质,以及如何进行图分割。
1.2.1 为什么要引入拉普拉斯矩阵 L ?
因为 L 矩阵具有良好的特性,能够帮助聚类。
- 特征值为 0 的数量表示了独立分区的数量;
- 相对应的特征向量 代表 哪些点属于该连通区域(即特征矩阵包含了聚类结果的信息)。

如上图,当无向图上存在左右两块分区时,L矩阵有两个 0 特征值,即有两个独立分区,且0特征值对应的特征向量如右图所示,特征向量中的值也包含了两个独立分区中顶点相连的情况:{3, 4, 5, 6, 7} 和 {0, 1, 2, 8, 9}。
如上图,当只存在一个连通区域时,仅有一个 0 特征值。之前为0的第二特征值数值上出现了一些变化,其对应的特征向量变换后,可以看出:正值对应的顶点为一个分区{3, 4, 5, 6, 7},负值对应的顶点为另一个分区{0, 1, 2, 8, 9}。
1.2.2 命题1 - 拉普拉斯矩阵L的性质
定理1:对于任意的向量
f
∈
R
n
f \in \Reals^n
f∈Rn,都有:
f
T
L
f
=
1
2
∑
i
=
1
n
∑
j
=
1
n
w
i
j
(
f
i
−
f
j
)
2
f^TLf = \frac{1}{2}\sum_{i=1}^n \sum_{j=1}^n w_{ij} (f_i - f_j)^2
fTLf=21i=1∑nj=1∑nwij(fi−fj)2证明如下:
定理2:L 是一个对称和半正定矩阵。
证明如下:
- 对称性:L=D-W,D和W均为对称矩阵,因此 L 也是对称矩阵;
- 半正定性:由定理 1 可知, f T L f ≥ 0 f^T L f \ge 0 fTLf≥0恒成立,所以 L 具有半正定性。
定理3:L 的最小特征值为0,且对应的特征向量为常数向量。
证明如下:
上式中,当
f
i
=
f
j
f_i = f_j
fi=fj 时,上式恒成立。
定理4:L 有 n 个非负、实数特征值** **
0
=
λ
1
≤
λ
2
≤
.
.
.
≤
λ
n
0 = \lambda_1 \le \lambda_2 \le ... \le \lambda_n
0=λ1≤λ2≤...≤λn
1.2.3 命题2 - 连通域数量
L 矩阵有几个特征值为 0 的特征向量,取决于无向图 G 有多少个连通域。
-
当 k = 1时,


f T L f = ( f 1 − f 2 ) 2 + ( f 1 − f 4 ) 2 + ( f 2 − f 3 ) 2 + ( f 3 − f 4 ) 2 + ( f 4 − f 5 ) 2 + ( f 5 − f 6 ) 2 = 0 f^TLf = (f_1-f_2)^2 + (f_1-f_4)^2 + (f_2 - f_3)^2 + (f_3-f_4)^2 + (f_4-f_5)^2 + (f_5-f_6)^2 = 0 fTLf=(f1−f2)2+(f1−f4)2+(f2−f3)2+(f3−f4)2+(f4−f5)2+(f5−f6)2=0
整理可得: f 1 = f 2 = f 3 = f 4 = f 5 = f 6 f_1 = f_2 = f_3 = f_4 = f_5 = f_6 f1=f2=f3=f4=f5=f6即 最小特征值对应的特征向量为常数向量。 -
当 k > 1时,L矩阵有 k 个不相交的连通区域,对于每个连通子区域 A i A_i Ai,其对应的拉普拉斯矩阵 L i L_i Li和 k=1 时的L具有相同的性质,即每个连通子图 A i A_i Ai对应的拉普拉斯矩阵 L i L_i Li都有一个0特征值及其常量特征向量。

1.2.4 图切割方法
基于图论的聚类方法是希望找到一种切割方法,使得切割后各个组之间的相似性很小,同时组内数据之间的相似性很大。假设给定一个无向图 G 和 邻接矩阵 W,将其聚类分割成不同的组:
假设划分为两个独立分区,
A
,
B
⊂
V
A,B \sub V
A,B⊂V:
假设划分为 k 个独立分区,
A
1
,
A
2
,
.
.
.
,
A
k
A_1, A_2,...,A_k
A1,A2,...,Ak:
常见的分割标准有两种:非标准化谱聚类和标准化谱聚类。
- 非标准化谱聚类 — 近似 RatioCut

- 标准化谱聚类 — 近似 NormalizedCut

1.2.5 近似 RatioCut (k=2)
问题可以简化为:
给定一个子集
A
⊂
V
A \sub V
A⊂V,构造向量
f
=
[
f
1
,
f
2
,
.
.
.
,
f
n
]
T
∈
R
n
f=[f_1,f_2,...,f_n]^T \in \Reals^n
f=[f1,f2,...,fn]T∈Rn:
应用定理1 构造向量 f :
此外,① f 是与常数向量 正交的向量。② 向量 f 的范数为:
∣
∣
f
∣
∣
=
n
||f|| = \sqrt{\smash[b]{n}}
∣∣f∣∣=n
正交的向量。② 向量 f 的范数为:
∣
∣
f
∣
∣
=
n
||f|| = \sqrt{\smash[b]{n}}
∣∣f∣∣=n

所以 RatioCut 的问题可以进一步转化为:
但由于 f 是自己假设构造的,实际上并不知道它是什么样的,因此干脆去掉这个条件,来对问题做一个近似,也就是近似 RatioCut,这里结合到前面构造的矩阵形式
f
T
L
f
f^TLf
fTLf,考虑使用瑞利熵来进行求解近似的 f 向量:
在得到 f 向量之后,根据 L 矩阵的性质,我们知道第一个特征向量包含了连通域的数量信息,第二个特征向量包含了点的分类信息,即Graph Cut信息,此时就可以使用k-means方法来对其进行聚类了。
进一步,当 k 大于等于2时,同理,把f变成矩阵进行处理。
1.3 代码练习
class Spectral {
public:
enum class ADJACENCY_METHOD{
NEAREST_NEIGHBOR,
K_NEIGHBORHOOD_GRAPH,
FULL_CONNECT
};
enum class NORMALIZED_LAPLACIAN{
NONE,
SYM, // L = D^{-1/2} L D^{-1/2} = I - D^{-1/2} W D^{-1/2}
RW // D^{-1} L = I - D^{-1}W
};
bool input(const Eigen::MatrixXd& input_matrix);
bool compute(int k = 0,
int max_step = 100,
double min_update_size = 0.01,
ADJACENCY_METHOD adjecency_method = ADJACENCY_METHOD::NEAREST_NEIGHBOR,
NORMALIZED_LAPLACIAN normalized_laplacian = NORMALIZED_LAPLACIAN::RW);
std::vector<Cluster>& get_clusters();
void print_clusters();
void set_neighbor_k(int neighbor_k_);
private:
bool build_adjacency_matrix(ADJACENCY_METHOD adjacency_method);
bool build_adjacency_matrix_full_connect();
bool build_adjacency_matrix_nearest_neighbor();
bool build_adjacency_matrix_k_neighborhood_graph();
bool build_Laplacian_matrix(NORMALIZED_LAPLACIAN normalized_laplacian);
bool build_Laplacian_matrix_NONE();
bool build_Laplacian_matrix_RW();
bool build_Laplacian_matrix_SYM();
bool build_V_matrix(int k = 0);
private:
Eigen::MatrixXd _data;
Eigen::MatrixXd _W;
Eigen::MatrixXd _L;
Eigen::MatrixXd _V;
std::vector<Cluster> _clusters;
int _cluster_num;
int _neighbor_k = 0;
};
#include "Clustering/spectral.h"
#include <Eigen/Dense>
bool Spectral::input(const Eigen::MatrixXd& input_matrix){
_data = input_matrix;
return true;
}
void Spectral::set_neighbor_k(int neighbor_k_) {
_neighbor_k = neighbor_k_;
}
bool Spectral::compute(int k, int max_step,
double min_update_size,
ADJACENCY_METHOD adjacency_method,
NORMALIZED_LAPLACIAN normalized_laplacian){
// 构建相似(权重)矩阵 W
if(!build_adjacency_matrix(adjacency_method)){
std::cerr << "build_adjacency_matrix failed!" << std::endl;
return false;
}
// 计算Laplacian矩阵
if(!build_Laplacian_matrix(normalized_laplacian)){
std::cerr << "build_Laplacian_matrix fialed!" << std::endl;
return false;
}
// 计算V矩阵
if(!build_V_matrix(k)){
std::cerr << "build_V_matrix failed!" << std::endl;
return false;
}
// 使用k-means聚类
KMeans k_means;
k_means.input(_V.transpose()); // 注意输入的是 特征向量V 的转置!!!
k_means.compute(_cluster_num, max_step, min_update_size);
_clusters = k_means.get_clusters();
print_clusters();
return true;
}
bool Spectral::build_adjacency_matrix(ADJACENCY_METHOD adjacency_method){
// 根据参数选择相似矩阵构建方法
if(adjacency_method == ADJACENCY_METHOD::FULL_CONNECT){
std::cout << "build_adjacency_matrix: FULL_CONNECT" << std::endl;
return build_adjacency_matrix_full_connect();
}else if(adjacency_method == ADJACENCY_METHOD::NEAREST_NEIGHBOR){
std::cout << "build_adjacency_matrix: NEAREST_NEIGHBOR" << std::endl;
return build_adjacency_matrix_nearest_neighbor();
}else if(adjacency_method == ADJACENCY_METHOD::K_NEIGHBORHOOD_GRAPH){
std::cout << "build_adjacency_matrix: K_NEIGHBORHOOD_GRAPH" << std::endl;
return build_adjacency_matrix_k_neighborhood_graph();
}else{
std::cerr << "adjacency_method invalid!" << std::endl;
return false;
}
return true;
}
bool Spectral::build_adjacency_matrix_full_connect(){
// 计算数据点间最大距离
double max_weight = 0.0;
for(size_t i = 0; i < _data.cols(); ++i){
const Eigen::VectorXd d1 = _data.col(i);
for(size_t j = 0; j < _data.cols(); ++j){
if(i == j) continue;
const Eigen::VectorXd d2 = _data.col(j);
if((d1 - d2).norm() > max_weight){
max_weight = (d1 - d2).norm();
}
}
}
// 计算点间权重
_W.resize(_data.cols(), _data.cols());
for(size_t i = 0; i < _data.cols(); ++i){
const Eigen::VectorXd d1 = _data.col(i);
for(size_t j = 0; j < _data.cols(); ++j){
if(i == j){
_W(i, j) = 0;
continue;
}
const Eigen::VectorXd d2 = _data.col(j);
_W(i, j) = max_weight - (d1 - d2).norm();
}
}
return true;
}
// 以点云总量的一定比例作为邻域大小
bool Spectral::build_adjacency_matrix_nearest_neighbor(){
// 定义 k 和 kd-tree的叶子大小
int leaf_size = (_data.cols() > 10) ? 0.1 * _data.cols() : 2;
int knn_size = (_data.cols() > 25) ? 0.25 * _data.cols() : 4;
// 计算最大距离
double max_weight = 0.;
for(size_t i = 0; i < _data.cols(); ++i){
const Eigen::VectorXd d1 = _data.col(i);
for(size_t j = 0; j < _data.cols(); ++j){
if(i == j) continue;
const Eigen::VectorXd d2 = _data.col(j);
if((d1 - d2).norm() > max_weight){
max_weight = (d1 - d2).norm();
}
}
}
std::cout << "max_weight: " << max_weight << std::endl;
std::cout << "leaf_size: " << leaf_size << std::endl;
std::cout << "knn_size: " << knn_size << std::endl;
// 计算相似矩阵 W
_W.resize(_data.cols(), _data.cols());
KDTreeAVLNearestNeighbors nn;
nn.set_data(_data, leaf_size);
for(size_t i = 0; i < _data.cols(); ++i){
const Eigen::MatrixXd d1 = _data.col(i);
KNNResultNumber knn_result(knn_size);
nn.KNN_search_number(d1, knn_result);
std::vector<DistanceValue> dv = knn_result.get_distance_value();
// 只负责更新邻域点数据
for(int j = 0; j < dv.size(); ++j){
if(dv[j].value == i){
_W(i, dv[j].value) = 0;
continue;
}
const Eigen::VectorXd d2 = _data.col(dv[j].value);
_W(i, dv[j].value) = max_weight - (d1 - d2).norm();
}
}
return true;
}
// 指定近邻点数量 neighbor_k
bool Spectral::build_adjacency_matrix_k_neighborhood_graph(){
// 定义 k 和 kd-tree的叶子大小
int leaf_size = (_data.cols() > 10) ? 0.1 * _data.cols() : 2;
int knn_size;
if(_neighbor_k > 0){
knn_size = _neighbor_k;
}else{
knn_size = (_data.cols() > 10) ? 0.25 * _data.cols() : 4;
}
// 计算最大距离
double max_weight = 0.;
for(size_t i = 0; i < _data.cols(); ++i){
const Eigen::VectorXd d1 = _data.col(i);
for(size_t j = 0; j < _data.cols(); ++j){
if(i == j) continue;
const Eigen::VectorXd d2 = _data.col(j);
if((d1 - d2).norm() > max_weight){
max_weight = (d1 - d2).norm();
}
}
}
// 计算相似矩阵 W
_W.resize(_data.cols(), _data.cols());
KDTreeAVLNearestNeighbors nn;
nn.set_data(_data, leaf_size);
for(size_t i = 0; i < _data.cols(); ++i){
const Eigen::MatrixXd d1 = _data.col(i);
KNNResultNumber knn_result(knn_size);
nn.KNN_search_number(d1, knn_result);
std::vector<DistanceValue> dv = knn_result.get_distance_value();
// 只负责更新邻域点数据
for(int j = 0; j < dv.size(); ++j){
if(dv[j].value == i){
_W(i, dv[j].value) = 0;
continue;
}
const Eigen::VectorXd d2 = _data.col(dv[j].value);
_W(i, dv[j].value) = max_weight - (d1 - d2).norm();
}
}
return true;
}
bool Spectral::build_Laplacian_matrix(NORMALIZED_LAPLACIAN normalized_laplacian){
// 根据参数选择Laplacian计算方法
if(normalized_laplacian == NORMALIZED_LAPLACIAN::NONE){
std::cout << "build_Laplacian_matrix: NONE" << std::endl;
return build_Laplacian_matrix_NONE();
}else if(normalized_laplacian == NORMALIZED_LAPLACIAN::RW){
std::cout << "build_Laplacian_matrix: RW" << std::endl;
return build_Laplacian_matrix_RW();
}else if(normalized_laplacian == NORMALIZED_LAPLACIAN::SYM){
std::cout << "build_Laplacian_matrix: SYM" << std::endl;
return build_Laplacian_matrix_SYM();
}else{
std::cerr << "normalized_laplacian method: invalid" << std::endl;
return false;
}
return true;
}
bool Spectral::build_Laplacian_matrix_NONE(){
// 计算度与度矩阵 D
Eigen::VectorXd d = _W.rowwise().sum();
Eigen::MatrixXd D = Eigen::MatrixXd::Zero(_data.cols(), _data.cols());
for(size_t i = 0; i < _data.cols(); ++i){
D(i, i) = d(i);
}
// 计算Laplacian矩阵 L = D - W
_L = D - _W;
return true;
}
bool Spectral::build_Laplacian_matrix_RW(){
// 计算度与度矩阵 D
Eigen::VectorXd d = _W.rowwise().sum();
Eigen::MatrixXd D = Eigen::MatrixXd::Zero(_data.cols(), _data.cols());
for(size_t i = 0; i < _data.cols(); ++i){
D(i, i) = d(i);
}
// 计算Laplacian矩阵 L = D^{-1}L = I - D^{-1}W
Eigen::MatrixXd I = Eigen::MatrixXd::Identity(_data.cols(), _data.cols());
_L = I - D.inverse() * _W;
return true;
}
bool Spectral::build_Laplacian_matrix_SYM(){
// 计算度与度矩阵 D
Eigen::VectorXd d = _W.rowwise().sum();
Eigen::MatrixXd D = Eigen::MatrixXd::Zero(_data.cols(), _data.cols());
for(size_t i = 0; i < _data.cols(); ++i){
D(i, i) = d(i);
}
// 计算D的逆平方根矩阵D_inv_sqrt
Eigen::MatrixXd D_inv_sqrt = Eigen::MatrixXd::Zero(_data.cols(), _data.cols());
for(size_t i = 0; i < _data.cols(); ++i){
if(d(i) > 0){ // 避免除以零
D_inv_sqrt(i, i) = 1.0 / std::sqrt(d(i));
}
}
// 方式二:处理可能的零度问题(可选)
// d = d.array() + (d.array() == 0).cast<double>() * 1e-10; // 添加一个小的值避免除以零
// D.diagonal() = d;
// // 计算D的逆平方根矩阵D_inv_sqrt
// Eigen::MatrixXd D_inv_sqrt = D.array().inverse().sqrt().matrix().asDiagonal();
// 计算Laplacian矩阵 L = D^{-1/2}LD^{-1/2} = I - D^{-1/2}WD^{-1/2}
Eigen::MatrixXd I = Eigen::MatrixXd::Identity(_data.cols(), _data.cols());
_L = I - D_inv_sqrt * _W * D_inv_sqrt;
return true;
}
bool Spectral::build_V_matrix(int k){
// 计算特征值及特征向量
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> eigen_solver(_L);
// increased order
Eigen::VectorXd L_eigen_values = eigen_solver.eigenvalues();
Eigen::MatrixXd L_eigen_vector = eigen_solver.eigenvectors();
std::cout << "L_eigen_values: " << L_eigen_values.transpose() << std::endl;
// 确定 k值
if(k > 0){
_cluster_num = k;
}else{
if(L_eigen_values.size() < 3){
_cluster_num = L_eigen_values.size();
}else{
// find eigen_gap
double max_eigen_gap = 0.;
int idx = -1;
for(int i = 0; i < L_eigen_values.rows() - 1; ++i){
double cur_gap = abs(L_eigen_values(i + 1) - L_eigen_values(i));
if(cur_gap > max_eigen_gap){
max_eigen_gap = cur_gap;
idx = i;
}
}
if(idx == -1){
std::cerr << "auto find eigen_gap error!" << std::endl;
return false;
}
_cluster_num = idx + 1;
}
}
std::cout << "number of cluster: " << _cluster_num << std::endl;
// 计算 V 矩阵
_V = L_eigen_vector.leftCols(_cluster_num);
return true;
}
void Spectral::print_clusters(){
std::cout << "===== spectral clusters =====" << std::endl;
for (const auto& c : _clusters) {
std::cout << "cluster " << c.id << ", " << c.center.transpose() << ", " << c.data_index_size << std::endl;
std::cout << "data index: ";
for (int i = 0; i < c.data_index_size; ++i) {
std::cout << c.data_index[i] << " ";
}
std::cout << std::endl;
}
std::cout << "====================" << std::endl;
}
2. Mean shift(均值漂移算法)
假设给定一堆二维数据点和 k 个半径为 r 的圆,如何放置这些圆可以使得圆中包含的点的数量最多?
方法一:对每一个点进行Radius-NN搜索,计算每个点邻域 r 内的点的数量,排序后找到前 k 个包含点数最多的圆的位置。(计算量较大)
方法二:使用Mean-shift 方法近似求解,先随机找到一个点,计算该点邻域 r 内所有数据点的平均值,再将圆心移动到平均值点所在的位置,不断迭代直至圆心不再移动。(可以作为近似解,但不是最优解)
2.1 算法流程

算法的主要流程如下:(需要给定半径 r )
-
随机选择一个点作为半径为 r 圆的圆心;
-
将圆心移动到 圆形邻域的中心;
-
重复步骤2,直到圆心为止不再移动;
-
重复步骤1-3,找到多个这样的点,并去除重叠的圆;
如果存在多个圆重叠,选择包含点最多的那个圆。 -
将数据点划分到距离其最近的圆心(类似于 k-means)
2.2 算法优缺点
- 算法复杂度: O ( T ⋅ n ⋅ l o g ( n ) ) O(T \cdot n \cdot log(n)) O(T⋅n⋅log(n)),其中 T 表示圆的数量,n 表示样本数量;
- 优点:能够自动发现类的数量、参数简单(仅需要设置圆的半径r)、对噪声不敏感;
- 缺点:不一定能找到最优解、取决于初始点的位置、基于欧式距离,假设类是符合椭圆形状的、对高维数据不太适用。
3. DBSCAN
DBSCAN(Density-Based Spatial Clustering of Application with Noise),基于密度的、对噪声鲁棒的聚类算法。该算法主要基于数据的空间密度进行聚类,将类簇定义为密度相连的点的最大集合,只有目标点周围一定空间范围的对象个数大于所设定的阈值时,才会生成类簇。如果存在单个目标点属于多个类簇的情况,类簇间也会扩展形成新的类簇,这样能够把符合要求的数据都划分到类簇中,不仅可以发现数据集中任意形状的类簇,还可以对数据集中存在的噪声和异常数据进行过滤。
主要参数有邻域半径eps 和密度阈值 min_pts,基本概念包括核心点、边界点、噪声点等。
- 核心点:对于任意数据点,在其半径为 eps 的邻域内的数据点数量如果超过密度阈值 min_pts,那么该点就是一个核心点。(如下图红色点)
- 边界点:对于任意数据点,在其半径为 eps 的邻域内的数据点数量如果小于密度阈值 min_pts,但其位于其他核心点的邻域内,那么该点就是一个边界点;(如下图黄色点)
- 噪声点:对于任意数据点,在其半径为 eps 的邻域内的数据点数量如果小于密度阈值 min_pts,且本身也不属于其他核心点邻域,那么该点就是一个噪声点。(如下图蓝色点)

3.1 算法流程
主要处理流程如下:(首先将所有数据点都标记为未访问)
给定参数:邻域半径 eps,密度阈值 min_pts;
- 随机选取一个未访问的点 p,对其进行 Radius-NN搜索;
- 判断该点的近邻点数量是否 超过 min_pts?
- 超过,将 p 记为核心点,并创建一个聚类 C,将 p 标记为已访问点,接着执行步骤3;
- 未超过,将 p 标记为噪声点,同时状态为已访问。
- 遍历核心点 p 的所有邻域点,并将这些数据点 标记为 类C
- 如果该邻域点也是核心点,则重复 步骤3;
- 取出 聚类C的数据点,重复 步骤1-3;
- 直到所有数据点都被标记为已访问。
3.2 代码练习
typedef struct DBSCANCluster{
std::vector<size_t> core_points;
std::vector<size_t> neighborhood;
}DBSCANCluster;
class DBSCAN{
public:
void set_data(const Eigen::MatrixXd& _input_matrix, int leaf_size = 5);
bool compute(double radius, int min_points); // 使用unorder_set进行邻居点扩展
bool compute_copy(double radius, int min_points); // 使用动态Vector进行邻居点扩展
// 聚类结果保存和输出
bool save_cluster_data_to_file(const std::string& file_name);
void print_clusters();
private:
bool find_radius_nn(const Eigen::MatrixXd& key, double radius, std::vector<size_t>& neighbors);
private:
Eigen::MatrixXd _data;
std::vector<DBSCANCluster> _clusters;
KDTreeAVLNearestNeighbors _kdtree_nn;
};
#include "Clustering/DBSCAN.h"
#include <unordered_set>
void DBSCAN::set_data(const Eigen::MatrixXd& input_matrix, int leaf_size){
_data = input_matrix;
_kdtree_nn.set_data(input_matrix, leaf_size);
}
bool DBSCAN::compute(double radius, int min_points){
// 定义访问记录表
std::vector<bool> visited(_data.cols(), false);
std::vector<bool> cluster_neighbors(_data.cols(), false);
std::cout << "data cols: " << _data.cols() << std::endl;
// 遍历所有数据点
for(size_t i = 0; i < _data.cols(); ++i){
if(!visited[i]){
// 查找当前点的邻域点
const Eigen::VectorXd& p = _data.col(i);
std::vector<size_t> neighbors;
if(!find_radius_nn(p, radius, neighbors)){
std::cerr << "find_radius_nn failure!" << std::endl;
return false;
}
std::cout << "i: " << i << " ,neighbors: " << neighbors.size() << std::endl;
// 判断当前点是否为核心点
if(neighbors.size() < min_points){
visited[i] = true;
}else{
// 为核心点构建新聚类并扩展
DBSCANCluster cluster;
cluster.core_points.emplace_back(i);
cluster.neighborhood.emplace_back(i);
visited[i] = true;
cluster_neighbors[i] = true;
// 邻居点扩展
std::unordered_set<size_t> neighbors_queue;
for(size_t k = 0; k < neighbors.size(); ++k){
if(!visited[neighbors[k]] && !cluster_neighbors[neighbors[k]]){
neighbors_queue.insert(neighbors[k]);
}
}
while(!neighbors_queue.empty()){
// 取出当前点,判断邻域关系
size_t index = *neighbors_queue.begin();
neighbors_queue.erase(neighbors_queue.begin());
const Eigen::MatrixXd& cur_p = _data.col(index);
std::vector<size_t> nneighbors;
if(!find_radius_nn(cur_p, radius, nneighbors)){
std::cerr << "find_radius_nn failure!" << std::endl;
return false;
}
std::cout << "index: " << index << " ,nneighbors: " << nneighbors.size() << std::endl;
if(nneighbors.size() < min_points){
visited[index] = true;
cluster.neighborhood.emplace_back(index);
cluster_neighbors[index] = true;
}else{
cluster.core_points.emplace_back(index);
cluster.neighborhood.emplace_back(index);
visited[index] = true;
cluster_neighbors[index] = true;
for(size_t n = 0; n < nneighbors.size(); ++n){
if(!visited[nneighbors[n]] && !cluster_neighbors[nneighbors[n]]){
neighbors_queue.insert(nneighbors[n]);
}
}
}
}
_clusters.emplace_back(cluster);
}
}
}
return true;
}
bool DBSCAN::compute_copy(double radius, int min_points) {
std::vector<bool> visited(_data.cols(), false);
std::vector<bool> cluster_point(_data.cols(), false); //防止同一个数据点的id被多次添加到cluster.neighborhood
// 遍历所有数据
for (size_t i = 0; i < _data.cols(); ++i) {
if (!visited[i]) {
std::cout << "To find i = " << i << " neighbors" << std::endl;
// 寻找邻近点
const Eigen::VectorXd& data_point = _data.col(i);
std::vector<size_t> neighbors;
if (!find_radius_nn(data_point, radius, neighbors)) {
std::cerr << "find_knn failure" << std::endl;
return false;
}
std::cout << "i: " << i << ", neighbors: " << neighbors.size() << ", " << min_points << std::endl;
// 判断是否为core point
if (neighbors.size() >= min_points) { // core point
DBSCANCluster cluster;
cluster.core_points.emplace_back(i); // set core point
cluster.neighborhood.emplace_back(i);
cluster_point[i] = true;
visited[i] = true;
// add neighbors
for (size_t k = 0; k < neighbors.size(); ++k) {
if (!visited[neighbors[k]] && !cluster_point[neighbors[k]]) {
cluster_point[neighbors[k]] = true;
cluster.neighborhood.emplace_back(neighbors[k]);
}
}
// 以当前点为起点,从他的neighbors中寻找其他core point
for (size_t k = 0; k < cluster.neighborhood.size(); ++k) {
std::cout<< "k: " << k << ", cluster.neighborhood size: " << cluster.neighborhood.size() << std::endl;
if (!visited[cluster.neighborhood[k]]) {
std::vector<size_t> nneighbors;
if (!find_radius_nn(_data.col(cluster.neighborhood[k]), radius, nneighbors)) {
std::cerr << "find_knn failure" << std::endl;
return false;
}
std::cout << "k: " << k << ", nneighbors: " << nneighbors.size() << ", " << min_points << std::endl;
if (nneighbors.size() >= min_points) { // 又找到一个core point
cluster.core_points.emplace_back(cluster.neighborhood[k]); // set core point
visited[cluster.neighborhood[k]] = true;
cluster_point[cluster.neighborhood[k]] = true;
// add neighbors
for (size_t n = 0; n < nneighbors.size(); ++n) {
if (!visited[nneighbors[n]] && !cluster_point[nneighbors[n]]) {
cluster_point[nneighbors[n]] = true;
cluster.neighborhood.emplace_back(nneighbors[n]);
}
}
} else {
// 噪声点
visited[cluster.neighborhood[k]] = true;
}
}
}
_clusters.emplace_back(cluster);
} else {
// 噪声点
visited[i] = true;
}
}
}
return true;
}
bool DBSCAN::find_radius_nn(const Eigen::MatrixXd& key, double radius, std::vector<size_t>& neighbors){
KNNResultRadius knn_result(radius);
if(!_kdtree_nn.KNN_search_radius(key, knn_result)){
std::cerr << "KNN_search_radius failed!" << std::endl;
return false;
}
std::vector<DistanceValue> dv = knn_result.get_distance_value();
neighbors.clear();
for(const auto& d : dv){
neighbors.emplace_back(d.value);
}
return true;
}
bool DBSCAN::save_cluster_data_to_file(const std::string& file_name){
std::ofstream ofs(file_name);
if(!ofs.is_open()){
std::cerr << "can not open " << file_name << std::endl;
return false;
}
for(const auto& c : _clusters){
for(size_t i = 0; i < c.neighborhood.size(); ++i){
ofs << _data(0, c.neighborhood[i]) << " " << _data(1, c.neighborhood[i]) << " ";
}
ofs << std::endl;
}
ofs.close();
std::cout << "save result to " << file_name << std::endl;
return true;
}
void DBSCAN::print_clusters() {
std::cout << "===== DBSCAN clusters =====" << std::endl;
for (const auto& c : _clusters) {
std::cout << "core_point index: size: " << c.core_points.size() << ", ";
for (size_t i = 0; i < c.core_points.size(); ++i) {
std::cout << c.core_points[i] << " ";
}
std::cout << std::endl;
std::cout << "neighborhood index: size: " << c.neighborhood.size() << ", ";
for (size_t i = 0; i < c.neighborhood.size(); ++i) {
std::cout << c.neighborhood[i] << " ";
}
std::cout << std::endl;
}
std::cout << "===========================" << std::endl;
}
3.3 算法优缺点
- 算法复杂度: O ( n ⋅ l o g ( n ) ) O(n \cdot log(n)) O(n⋅log(n)),其中,n 为数据点数, l o g ( n ) log(n) log(n)为搜索效率,如二分查找。
- 优点:能够发现任意形状的类簇、可以自动确定类的数量、对噪声不敏感;
- 缺点:基于高密度数据被低密度数据分割的假设,如果两个高密度数据之间密度差异不明显,可能会标记为一类、对高维数据不太适用。
4. 聚类算法对比


参考资料:
- 一文带你深入浅出地搞懂谱聚类
- 点云学习第四周(聚类下)
- 《三维点云处理》学习笔记(4):聚类
- 三维点云处理-深蓝学院