kitti数据集
00 无人驾驶数据集汇总
无人驾驶数据集汇总(一)附下载地址
0.kitti数据简介
kitti数据集是一个为立体,光流,视觉里程计,3D目标检测和3D跟踪等任务而开发采集的基准数据集。
它利用了Annieway自动驾驶平台,配备了1个OXTS RT 3003,1台Velodyne HDL-64E激光扫描仪,2台Point Grey Flea 2(FL2-14S3M-C)一百四十万像素灰度相机,2台一百四十万像素彩色摄像头,以及4个4~8mm的可变焦镜头Edmund Optics NT59-917。
根据 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite 这篇文章的描述,相机,激光扫描仪以及定位系统全部都经过了校准和时间同步,且里程计的真值由GPS/IMU定位单元的输出投影到校准后的左侧相机得到。
也就是说,在kitti提供的里程计真值是基于相机坐标系的,而根据上面kitti链接中的介绍,相机坐标系为:向前为z,向右为x,向下为y;而velodyne激光扫描仪坐标系则是:向前x,向左y,向上z。(需要注意的是,点云数据是在激光雷达坐标系下,而真值则是在相机坐标系下。)
在从官网上下载的真值位姿具有以下格式(kitti总共有编号为00-20的21个数据集序列,其中只有00-10序列公开了真值,序列11~20仅用来做为算法评估使用):
1.000000e+00 9.043680e-12 2.326809e-11 5.551115e-17 9.043683e-12 1.000000e+00 2.392370e-10 3.330669e-16 2.326810e-11 2.392370e-10 9.999999e-01 -4.440892e-16
9.999978e-01 5.272628e-04 -2.066935e-03 -4.690294e-02 -5.296506e-04 9.999992e-01 -1.154865e-03 -2.839928e-02 2.066324e-03 1.155958e-03 9.999971e-01 8.586941e-01
9.999910e-01 1.048972e-03 -4.131348e-03 -9.374345e-02 -1.058514e-03 9.999968e-01 -2.308104e-03 -5.676064e-02 4.128913e-03 2.312456e-03 9.999887e-01 1.716275e+00
9.999796e-01 1.566466e-03 -6.198571e-03 -1.406429e-01 -1.587952e-03 9.999927e-01 -3.462706e-03 -8.515762e-02 6.193102e-03 3.472479e-03 9.999747e-01 2.574964e+00
它们每一行有12个数据,它们记录了每一个ie时刻的位置和方向,对于上面的每一行p0p1p2…p11它们与(旋转+平移)欧式矩阵
但是是vip文章:kitti点云地图拼接
1.kitti数据集点云bin文件显示
1.bin文件显示
参考点云侠点云,才发觉bin文件cc加载可能出错(我还以为内存不够还特地增加了内存)
经研究,我当前觉得可行的思路:
1.bin文件单个单个转成pcd文件
参考连接:KITTI-二进制点云数据集使用笔记
2.bin文件读取解析,然后通过ROS节点发出来,再通过rviz显示
参考连接:kitti数据集在ros中可视化一(显示(发布)点云、图像信息,学习笔记)
2.KITTI真值数据理解及下载
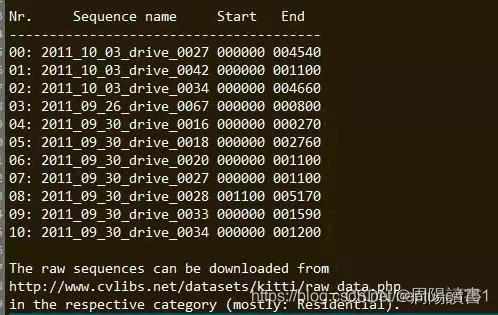
KITTI Visual Odometry一整个数据集分成的10个序列
上方的对应KITTI RAW DATA
Nr. Sequence name
00: 2011_10_03_drive_0027
01: 2011_10_03_drive_0042
02: 2011_10_03_drive_0034
03: 2011_09_26_drive_0067
04: 2011_09_30_drive_0016
05: 2011_09_30_drive_0018
06: 2011_09_30_drive_0020
07: 2011_09_30_drive_0027
08: 2011_09_30_drive_0028
09: 2011_09_30_drive_0033
10: 2011_09_30_drive_0034
如:KITTI00下载这个网址–>KITTI RAW DATA里面的名为2011_10_03_drive_0027 数据集
闭环检测的KITTI数据集的Ground-Truth
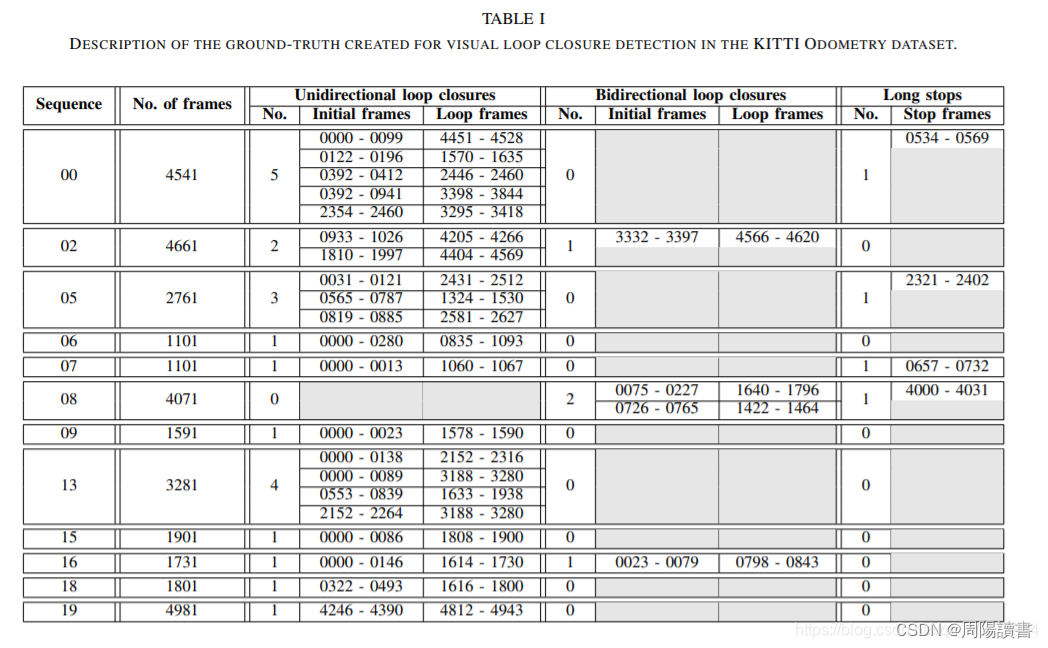
图片出处:Fast and Effective Visual Place Recognition using Binary Codes and Disparity Information

KITTI数据集轨迹说明及下载
注:
1)若仅测试算法是否安装好,对轨迹无要求,建议选小一点的包,eg.04、17、20、03;
2)若测试算法性能,要求闭环,含有真值,但包不要太大,eg.07、06、09;
3)若测试算法性能,要求轨迹复杂,含有真值,电脑性能好,eg.05、08、00、02。
3.KITTI数据集Raw Data与Ground Truth序列00-10的对应关系,以及对应的标定参数
KITTI数据集Raw Data与Ground Truth序列00-10的对应关系,以及对应的标定参数
在poses目录下,包含00.txt-10.txt 11个序列,每一个文件包换Nx12个表格,N代表帧数。每一行利用3x4转移矩阵代表左边相机系统位姿,转移矩阵将当前帧左边相机系统中的一个点映射到第0帧的坐标系统中。转移矩阵中平移的部分表示当前相机位置(相对于第0帧)。
下面代码为MATLAB中显示上图sequence 00的groundtruth,修改filename可以获得所有sequence的groundtruth地图。
%% display groundtruth of KITTI poses
% include sequence from 00-10.txt
% read from poses
filename = '$PATH/poses/00.txt';
fid = fopen(filename);
fseek(fid, 0, 'bof');
lastposition = ftell(fid);
disp(['start position:',num2str(lastposition)]);
groundtruth = [];
while fgetl(fid) ~= -1, % end of line check
fseek(fid, lastposition, 'bof');
line = textscan(fid,'%f %f %f %f %f %f %f %f %f %f %f %f\n',1);
line 

![NSSCTF | [SWPUCTF 2021 新生赛]jicao](https://img-blog.csdnimg.cn/direct/c94a49ce360a4ba9ba2bc00132a3cad5.png)