上一节PID的simulin仿真,这一节用LQR
一、模型


二、LQR
LQR属于现代控制理论的一个很重要的点,这里推荐B站的【Advanced控制理论】课程(up主DR_CAN),讲得很好,这里引用了他视频里讲LQR的ppt。
LQR属于lost优化问题,L:Linear ;Q:Quadratic二次型;R:regulater 调制器
主要是优化状态空间下,保证稳定的同时,如何选取状态方程特征值。

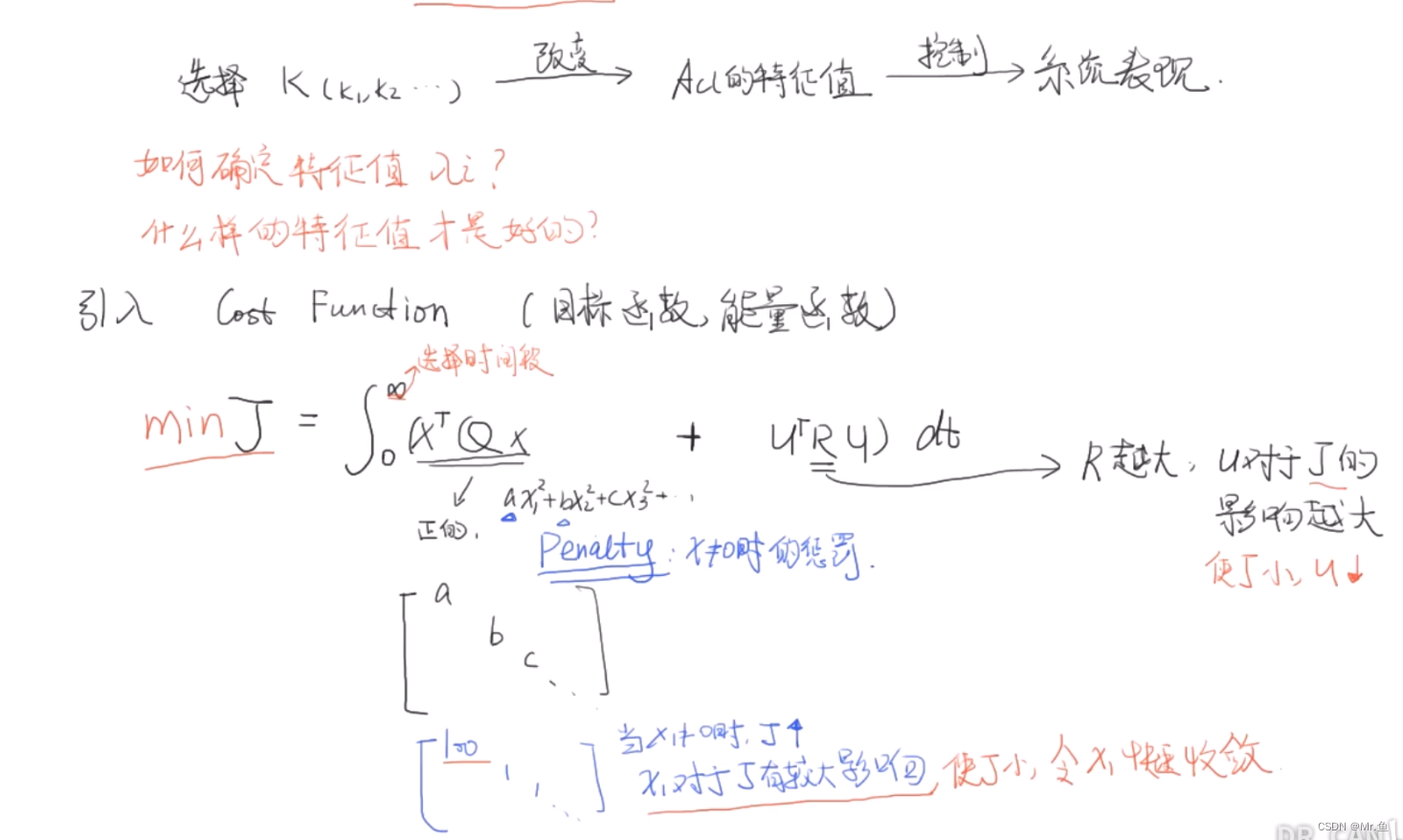
Q一般是根据你想控制那些状态给出不同权重的矩阵,就是一个对角矩阵,按顺序对状态量给出权重,给的数值越大,代表你对对应的状态控制要求也高,R是输入是N*1的矩阵,一般只有一维输入的话就一个数,越大表示对输入的控制要求更高。
二、平衡小车LQR
由于需要有状态转移矩阵和输入系数矩阵,所以需要建立动力学模型,建模方法很多(一般常用的是牛顿力分析和拉格朗日方程)
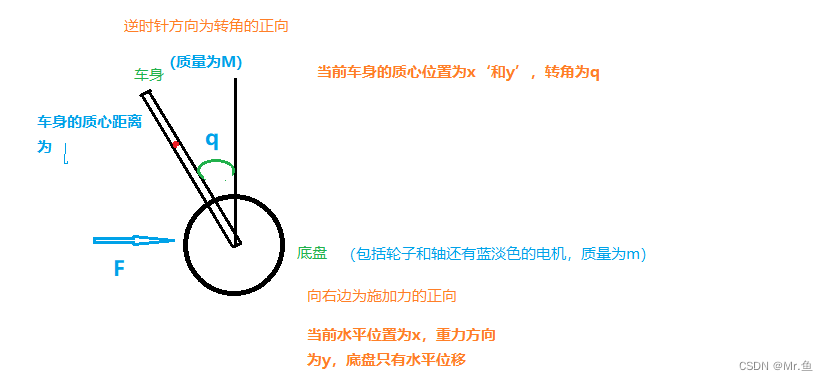
1.牛顿力学分析方程
(1)底盘只有水平方向的移动,故运动方程只有在x方向,
假设小车的摩擦系数为b,由m*a=F公式可得:
其中N为车身(摆杆)对底盘在x方向的反作用力 (1)
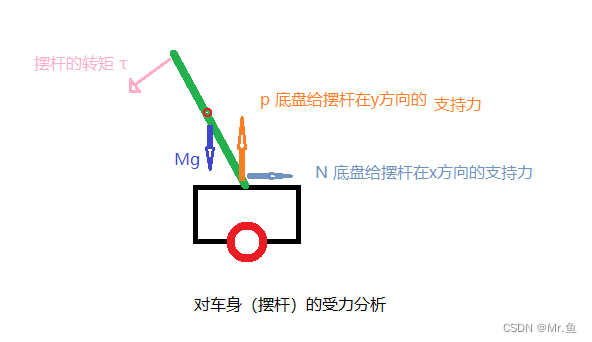
(2)车身(摆杆)受力分析:
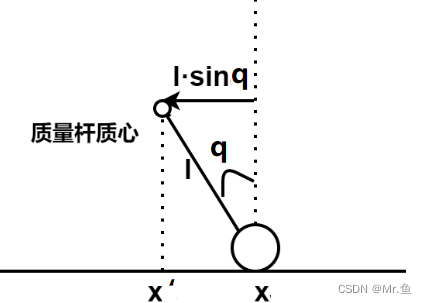
某一时刻单摆在水平上的位置:
单摆在水平方向所收到的力只有N,所以水平方向的运动方程:
(2)
由(2)带入(1)可得第一个运动方程
(3)
对单摆在垂直方向的受力分析
(4)
摆杆质心力矩平衡可得(是摆杆的转动惯量,规则的物体容易求,但这里我看了人家,尝试去算,但都感觉不对,看过别人的基本设定在0.005左右都可以,后面试了其他值感觉都还可以用,其实有种方法是用实物倒放,让它自由摆动后测出相关的值去推,以后有时间可以试试) :
(5)
把公式(2)、(4)带入(5)可得
化简得到第二条运动学方程:
(6)
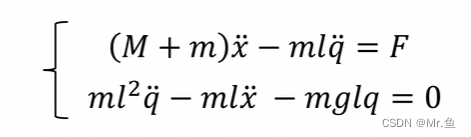
由(3)和(6)得到的方程组:
线性化, 为小接近的小角度,q为小接近0的小角度,, 𝑐𝑜𝑠(q) 为1, 𝑠𝑖𝑛(q) 为0, F施加给小车的输入,改成u表示:
(7)
(7)可以改写成
其中
设状态量为
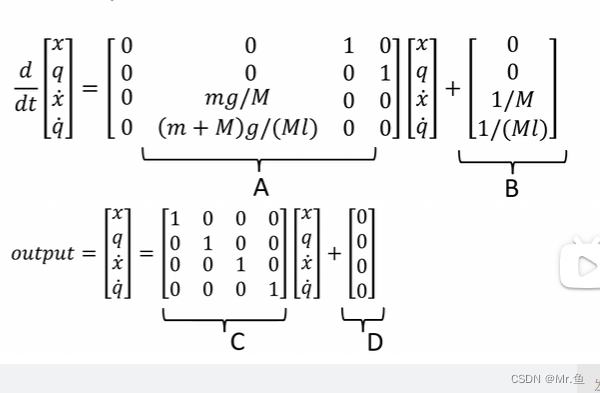
最终的状态空间方程模型为:
状态转移矩阵A 输入矩阵B
由于状态量与输出反馈一致,故C矩阵为
如果你模型里面反馈数据只有平移速度 和角度速度,那C就算2*4的矩阵
D=0
有了A B C D矩阵就可以用LQR求解 (也可以用MPC来求解,套路都一样) ,MATLAB里面有lqr的求解器,一行代码搞定.
不过还有Q 和R 超参的设置, Q可简单设置[10 0 10 0] 顺序对应的水平方向 的x 和速度, 角度q 和角速度,意思是对x 和角度q重点控制, R=1,对输入要求一般,都可以修改,根据具体情况修改超参。
MALAB 的代码很简单
K = lqr(A,B,Q,R)会得出K,K 是4*1的向量,然后分别与状态量点乘就得到输入u的值,即F 这就是控制量
由于系统是非时变系统,因此lqr只需求一次K就行了
通过A 和B矩阵,也可以判断系统是否可控
Tc = ctrb(A,B);
if (rank(Tc)==4)
fprintf('此系统是可控的!\n');如果不加外力,系统肯定是不稳定的,直接用
Tc = ctrb(A);
if (rank(Tc)==4)
fprintf('此系统是可控的!\n');就可以测试,
说白就算去判断它的状态转移矩阵是否满秩,现代控制理论有相关的推导分析
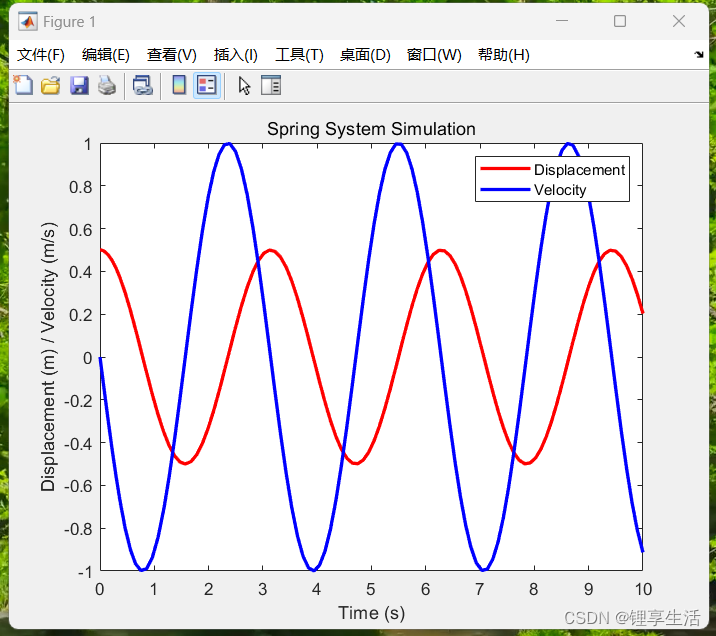
simulink建模跟上一张PID的模型基本一样,只是计算输入控制量这块不一样,简单放个图:
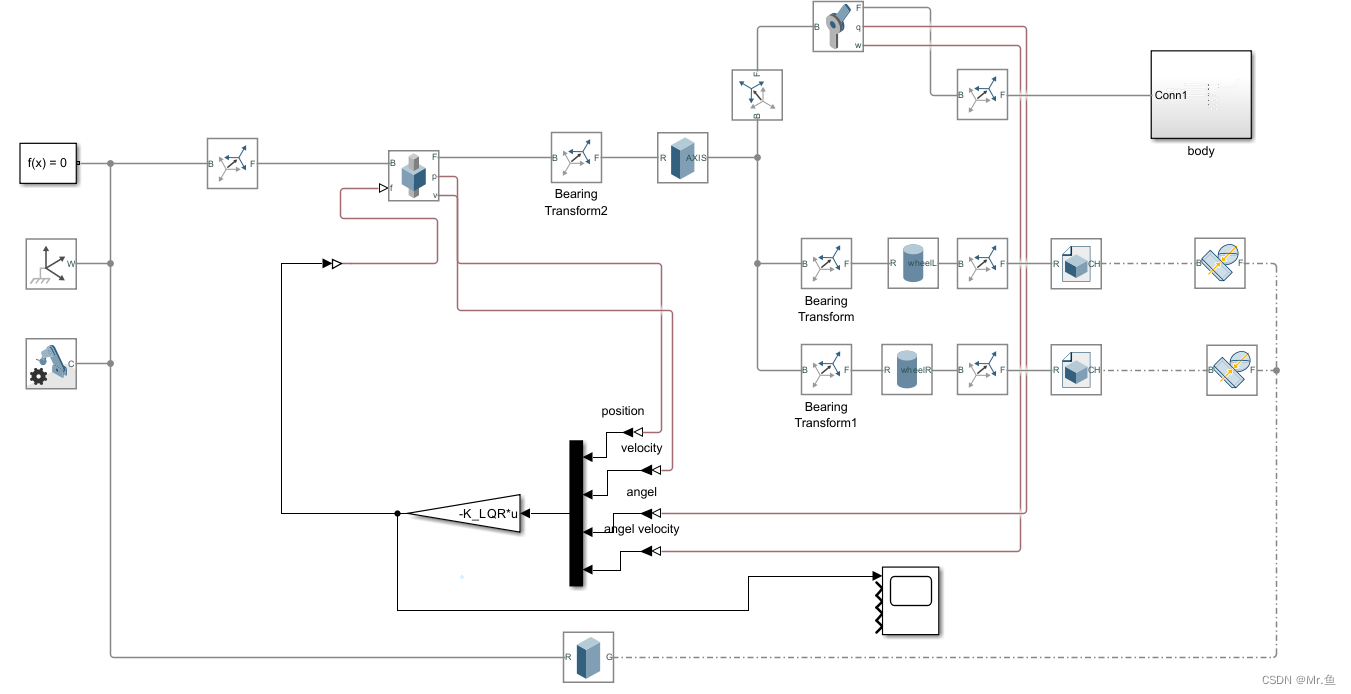
这里的K_LQR就算lar算出来的K,这里是负反馈,因此是负号;
其他的参数主要有取0.065m;g=9.8,车身质量M=1.25kg,底盘m=0.5kg。
算出的K为
K =[ -1.0000 -2.1447 37.5875 3.2123 ]
三、上面的牛顿力学分析运动方程很繁琐,同样是找状态转移矩阵 A 输入矩阵 B 一般直接用拉格朗日动力学方程,省事些。
这里不想再敲公式了,直接参考使用B站博主(J_H_Li)的小车倒立摆最优控制教程 视频 讲得通俗易懂,推荐去看

拉格朗日方程:

是指某个状态量
是对应
状态量的外力
分别找出系统总动能 和势能 再分别对状态量进行拉格朗日方程
总动能

因为以底盘质点为原点,只有车身的势能,因此总势能
这里的M是底盘的质量,m是摆杆的,
所以拉格朗日量

分别对x和q进行拉格朗日方程得到:

再进行线性化,q为小接近0的小角度,, 𝑐𝑜𝑠(q) 为1, 𝑠𝑖𝑛(q) 为0, 得到两条动力方程:
然后退出A B矩阵,F改为u,就得到
可以看到A 和 B 跟上面用牛顿受力分析得出的不一样,这里算出来的k
K =[ -1.0000 -1.9719 36.2409 1.8586 ]
但相差不大,都是可以让系统稳定的
这种方法比牛顿受力分析,找出一大堆公式要友好得多。

![[微信小程序] 入门笔记2-自定义一个显示组件](https://img-blog.csdnimg.cn/direct/4f11639794bb454ba7f8c5bb3144d775.png)