手写Minist识别是一个非常经典的问题,其数据集共有70000张28*28像素的图片,其中60000张作为训练集,剩下的10000张作为测试集,每一张图片都表示了一个手写数字,经过了灰度处理。
本文延续前面文章提到的多层感知机,在这里完成更复杂的任务,这个也可以作为分类任务的代表。
1.导入数据
首先导入模型,我个人的习惯是在同名目录下新建static文件夹存放一些数据,这里先建好static/data,然后就可以等待下载数据了,文件夹关系如下:
在这里,尽管导入的时候已经是batch的形式了,为了后面方便起见,我还将训练集和测试集分别按照numpy的格式组装为一个个batch,然后将标注进行独热编码,具体的代码可以看后面的完整代码。
2.训练模型
训练模型是最复杂的部分,这里涉及到前向传播和反向传播,这部分在我前面的博客中提到过,不再赘述,不同的是多出了在每个隐藏层和输出层进行了批量规范化(Batch Normalization),也就是BN层,在这里简单展开介绍一下。
(感觉我自己写的部分可能只能我自己看得懂了…建议可以顺着我推荐的博客或者其他人的好好了解一下,我写的比较简单)
建议先看这两篇:
1. 知乎,这一篇主要是介绍一些优点
2. 知乎,这一篇的推导非常详细
先考虑在训练时的情况,给出表达式,假设输入为
x
x
x,输出为
o
o
o,维度均为
n
×
1
n\times1
n×1,那么在
B
N
BN
BN层中经过了如下变换:
μ
=
1
m
∑
i
=
1
n
x
i
σ
2
=
1
m
∑
i
=
1
n
(
x
i
−
μ
)
2
x
^
=
x
−
μ
σ
2
+
ϵ
o
=
γ
x
^
+
β
μ=\frac{1}{m}∑_{i=1}^{n}x_i\\\sigma^2=\frac{1}{m}∑_{i=1}^{n}(x_i-μ)^2\\\hat{x}=\frac{x-μ}{\sqrt{\sigma^2+\epsilon}}\\o=\gamma \hat{x}+\beta
μ=m1i=1∑nxiσ2=m1i=1∑n(xi−μ)2x^=σ2+ϵx−μo=γx^+β
μ
,
σ
μ,\sigma
μ,σ分别是均值和方差,下面的
x
^
\hat{x}
x^也就是经过标准化的
x
x
x,加入最后的
γ
,
β
\gamma,\beta
γ,β是缩放和平移的系数,通过学习得到。
得到了表达式,那么下面讨论参数更新的问题,也就是反向传播,不考虑 o o o之后到损失函数的,因为之后的都可以用 ∂ L ∂ o i \frac{ \partial L}{ \partial o_i} ∂oi∂L给出。
先给出
γ
\gamma
γ和
β
\beta
β的:
∂
o
i
∂
γ
=
x
^
i
∂
o
i
∂
β
=
1
\frac{ \partial o_i}{ \partial \gamma}=\hat{x}_i\\ \frac{ \partial o_i}{ \partial \beta}=1
∂γ∂oi=x^i∂β∂oi=1
由于输入是
x
x
x,这个和前面的层直接关联,因此输出
o
o
o和
x
x
x的关系也很重要,计算过程如下:
∂
o
i
∂
x
i
=
∂
μ
∂
x
i
∂
o
i
∂
μ
+
∂
σ
2
∂
x
i
∂
o
i
∂
σ
2
+
∂
x
^
i
∂
x
i
∂
o
i
∂
x
^
i
\frac{ \partial o_i}{ \partial x_i}= \frac{ \partial μ}{ \partial x_i}\frac{ \partial o_i}{ \partial μ}+ \frac{ \partial \sigma^2}{ \partial x_i}\frac{ \partial o_i}{ \partial \sigma^2}+ \frac{ \partial \hat{x}_i}{ \partial x_i}\frac{ \partial o_i}{ \partial \hat{x}_i}
∂xi∂oi=∂xi∂μ∂μ∂oi+∂xi∂σ2∂σ2∂oi+∂xi∂x^i∂x^i∂oi
这里要注意的是有三个关于
x
x
x的变量的链式求导,
x
x
x在关于
x
,
σ
2
,
x
^
x,\sigma^2,\hat{x}
x,σ2,x^的表达式中都出现了,因此链式求导都要加上,这在具体计算
∂
o
i
∂
μ
,
∂
x
^
i
∂
x
i
\frac{ \partial o_i}{ \partial μ},\frac{ \partial \hat{x}_i}{ \partial x_i}
∂μ∂oi,∂xi∂x^i等都要注意,下面写一个
∂
o
i
∂
μ
\frac{ \partial o_i}{ \partial μ}
∂μ∂oi的:
∂
o
i
∂
μ
=
∂
x
^
i
∂
μ
∂
o
i
∂
x
^
i
+
∂
σ
2
∂
μ
∂
o
i
∂
σ
2
\frac{ \partial o_i}{ \partial μ}= \frac{ \partial \hat{x}_i}{ \partial μ} \frac{ \partial o_i}{ \partial \hat{x}_i}+ \frac{ \partial \sigma^2}{ \partial μ} \frac{ \partial o_i}{ \partial \sigma^2}
∂μ∂oi=∂μ∂x^i∂x^i∂oi+∂μ∂σ2∂σ2∂oi
这里之所以还有关于
σ
2
\sigma^2
σ2是因为
σ
\sigma
σ的表达式直接出现了
μ
μ
μ。
下面是一些过程,实际的使用是和损失函数
L
L
L的关系,下面框出的是看不懂的,去问了,不知道作者会不会回复。
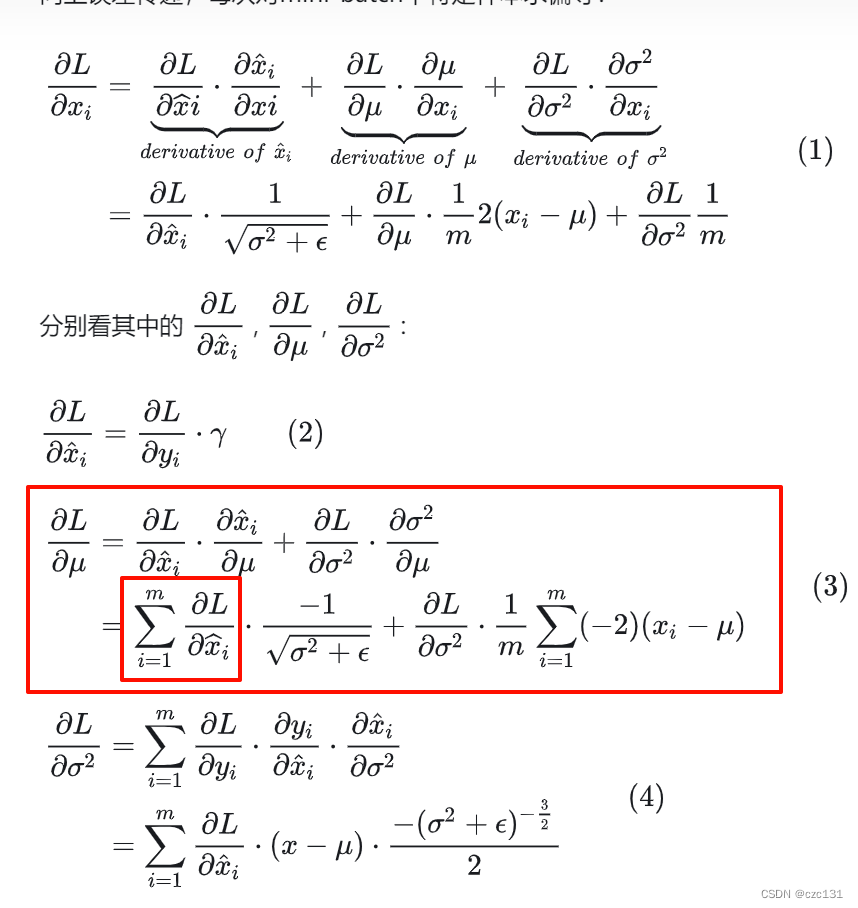
具体的过程这里不写了,就直接抄博客的最简表达式了(因为太抽象了…)
他的表达式如下:

在这样的情况下,原本更新
w
w
w的都要变化。假设经过线性累加后为
N
N
N,激活后为
O
O
O,那么原本
L
L
L关于
w
w
w的链式传播为:
∂
L
∂
w
=
∂
N
∂
w
∂
O
∂
N
∂
L
∂
O
\frac{ \partial L}{ \partial w}= \frac{ \partial N}{ \partial w} \frac{ \partial O}{ \partial N} \frac{ \partial L}{ \partial O}
∂w∂L=∂w∂N∂N∂O∂O∂L
现在在
O
O
O和
N
N
N之间多出了
B
N
BN
BN层,那么链式传播就要发生变化,假设
B
N
BN
BN层为
B
B
B,先经过
B
N
BN
BN层然后经过激活函数(一般对于ReLU是这个顺序),那么有下式:
∂
L
∂
w
=
∂
N
∂
w
∂
B
∂
N
∂
O
∂
B
∂
L
∂
O
\frac{ \partial L}{ \partial w}= \frac{ \partial N}{ \partial w} \frac{ \partial B}{ \partial N} \frac{ \partial O}{ \partial B} \frac{ \partial L}{ \partial O}
∂w∂L=∂w∂N∂N∂B∂B∂O∂O∂L
先看
∂
O
∂
B
∂
L
∂
O
\frac{ \partial O}{ \partial B} \frac{ \partial L}{ \partial O}
∂B∂O∂O∂L,对于反向传播来说,输入到底是
B
B
B(现在)还是
N
N
N(原来)都不重要,因为这个式子的计算不涉及这个值,只和输出
O
O
O有关,因此可以等同于原来的损失
δ
\delta
δ:
∂
O
∂
B
∂
L
∂
O
=
δ
L
a
y
e
r
,
j
=
{
g
(
O
L
a
y
e
r
,
j
)
∑
k
=
1
K
w
j
k
δ
L
a
y
e
r
+
1
,
k
,
L
a
y
e
r
不为输出
g
(
O
L
a
y
e
r
,
j
)
(
O
L
a
y
e
r
,
j
−
l
a
b
e
l
k
)
,
L
a
y
e
r
为输出
\frac{ \partial O}{ \partial B} \frac{ \partial L}{ \partial O}=δ_{Layer,j}= \left\{ \begin{array}{ccc} g(O_{Layer,j})∑_{k=1}^{K}w_{jk}δ_{Layer+1,k},\;Layer不为输出 \\ g(O_{Layer,j})(O_{Layer,j}-label_k),\;\;\;Layer为输出 \end{array} \right.\\
∂B∂O∂O∂L=δLayer,j={g(OLayer,j)∑k=1KwjkδLayer+1,k,Layer不为输出g(OLayer,j)(OLayer,j−labelk),Layer为输出
这里的
g
(
x
)
g(x)
g(x)表示激活函数的导数。
写到这一步,其实上面最终表达式的
∂
L
∂
x
i
\frac{ \partial L}{ \partial x_i}
∂xi∂L已经可以表示了,他的
x
i
x_i
xi其实就表示这里的
N
N
N,也就是
B
N
BN
BN层的输入,写出表达式的等效:(为了和上面一致,把
x
i
x_i
xi写为
x
x
x)
∂
L
∂
x
=
∂
B
∂
N
∂
L
∂
B
=
∂
B
∂
N
δ
=
f
(
∂
B
∂
x
^
δ
)
=
f
(
γ
δ
)
\frac{ \partial L}{ \partial x}= \frac{ \partial B}{ \partial N} \frac{ \partial L}{ \partial B}=\frac{ \partial B}{ \partial N}δ=f(\frac{ \partial B}{ \partial \hat{x}}δ)=f(\gamma δ)
∂x∂L=∂N∂B∂B∂L=∂N∂Bδ=f(∂x^∂Bδ)=f(γδ)
这个
f
(
x
)
f(x)
f(x)就是上面的求解公式,将
γ
δ
\gamma \delta
γδ替换掉
∂
L
∂
x
^
\frac{ \partial L}{ \partial \hat{x}}
∂x^∂L即可。
其他的其实跟前面提到的神经网络没什么区别了,在代码中我把隐藏层的偏置都去掉了,因为有的博客提到了BN层的偏置就不需要隐藏层的偏置了。(正好这个偏置又很难写)
在真正预测的时候,这时候无法计算出批对应的均值和标准差,这里采用的是统计训练过程中的均值 μ μ μ和方差 σ 2 \sigma^2 σ2,用于预测时进行规范化。
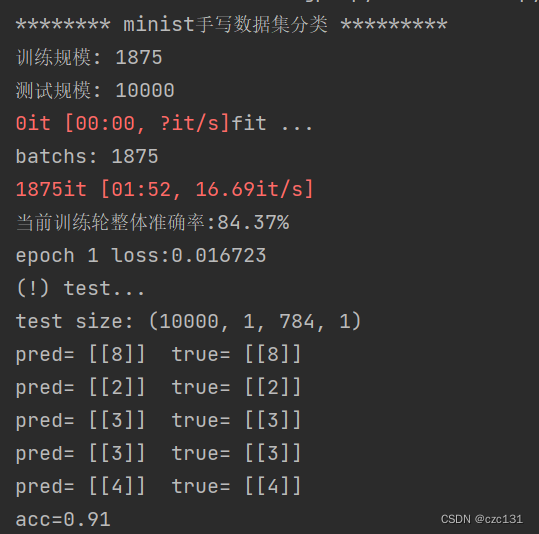
3.模型运行
模型运行无论之后的结果:(显示出来的都是预测的前面五个的结果)

因为没有很多优化,代码运行的效率并不算好,只能说勉强能跑(在 batch_size = 32 的情况下大约两分钟训练完一轮),在训练完第一轮的时候在测试集的准确率就已经达到大约90%了,后面几轮的提升不大。
没试过其他batch_size或者调参之类的,能跑应该就是没问题的吧?
4.完整代码
下面贴出完整代码,写的有冗余,写法也很抽象,仅供学习参考哈(很多推导我在前面的博客都提到过,这一篇就没有多说了)
# 手写Minist数据集分类
import numpy as np
import torch
import torchvision
from matplotlib import pyplot as plt
from numpy import log
from numpy.random import uniform
from sklearn.metrics import accuracy_score
from tqdm import tqdm
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def load_data(if_reload=False):
batch_size_train = 32
batch_size_test = 1
random_seed = 1
torch.manual_seed(random_seed)
train_loader = torch.utils.data.DataLoader(
torchvision.datasets.MNIST('./static/data/', train=True, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(
(0.1307,), (0.3081,))
])),
batch_size=batch_size_train, shuffle=True)
test_loader = torch.utils.data.DataLoader(
torchvision.datasets.MNIST('./static/data/', train=False, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(
(0.1307,), (0.3081,))
])),
batch_size=batch_size_test, shuffle=True)
train_size = len(train_loader)
test_size = len(test_loader)
print('训练规模:', train_size)
print('测试规模:', test_size)
# 设置类别的数量
num_classes = 10
onehot = np.eye(num_classes)
X_train = np.zeros((train_size, batch_size_train, 784, 1), dtype=np.float32)
y_train = np.zeros((train_size, batch_size_train, 10, 1), dtype=int) # 要独热编码
X_test = np.zeros((test_size, batch_size_test, 784, 1), dtype=np.float32)
y_test = np.zeros((test_size, batch_size_test, 1), dtype=int) # 不需要进行独热编码
# 训练
for batch_idx, (data, target) in enumerate(train_loader):
if data.shape[0] < batch_size_train:
break
X_train[batch_idx] = np.array(data).reshape(batch_size_train, -1, 1) # 展平放入
y_train[batch_idx] = onehot[target].reshape(batch_size_train, -1, 1) # 将整数转为一个10位的one hot编码
# 测试
for batch_idx, (data, target) in enumerate(test_loader):
if data.shape[0] < batch_size_test:
break
X_test[batch_idx] = np.array(data).reshape(batch_size_test, -1, 1) # 展平放入
y_test[batch_idx] = np.array(target).reshape(batch_size_test, -1, 1)
return X_train, y_train, X_test, y_test
class MyNet():
def __init__(self):
self.eps = 0.00001 # 极小值
self.new_rate = 0.1 # 均值新值所占的比例
self.alpha_BN = 0.005
# sigmoid
def sigmoid(self, x):
return 1 / (1 + np.exp(-x)) + self.eps # 加上一个极小值
# rule
def rule(self, x):
x[np.where(x < 0)] = 0
return x
# 损失函数
def loss_func(self, output, label): # 输入是batch*列向量
out = log(output + self.eps) # 加上一个极小值
loss = -label.transpose(0, 2, 1) @ out
return np.sum(loss.flatten()) # 总的损失(batch个)
def softmax(self, out): # 输入格式(batch,row,1),应该算出每个batch的最大值,然后减掉
x = out.copy()
res = np.zeros_like(x, dtype=np.float32)
for i in range(x.shape[0]):
x[i] -= max(x[i])
expx = np.exp(x[i])
sexpx = np.sum(expx)
res[i] = expx / sexpx
return res
# batch norm
def train_normlize(self, x, gamma, beta): # 输入 (batch,rows,1)
mmu = np.mean(x, axis=0)
var = np.mean((x - mmu) ** 2, axis=0) # rows,1
ivar = 1 / np.sqrt(var + self.eps) # rows,1
x_hat = (x - mmu) * ivar # [(batch,rows,1)-(rows,1)]/rows,1->batch,rows,1
out = gamma * x_hat + beta
return out, ivar, mmu, var, x_hat # 后面mmu和var是为了累计总均值和标准差,所以传回,x_hat在更新系数γ需要用到
def normlize_eval(self, x): # 输入 (batch,rows,1)
return (x - self.running_mmu) / self.running_var
def fit(self, X, Y, test_x=None, test_y=None, epochs=30, test_epoch=1 ,alpha=0.01, layers=2, layer_size=3, activation='sigmoid'):
# layer,layer_size:中间的隐藏层层数和隐藏层的大小
print('fit ...')
self.acti_func = self.sigmoid
if activation == "rule":
self.acti_func = self.rule
else:
assert "unknown activation algorithm: %s" % (activation)
batch_size, in_features = X[0].shape[0], X[0].shape[1]
out_features = Y[0].shape[1]
batchs = len(X)
batch_size = X[0].shape[0] # batch大小
print('batchs:', batchs)
samples = batch_size * batchs
# 矩阵初始化(随机初始化)
w_first = uniform(-1, 1, (in_features, layer_size)) # 每一行是一个输入神经元对所有下一层神经元的权值,+1是偏置的权值(有BN层不需要)
w_last = uniform(-1, 1, (layer_size, out_features)) # 每一行是一个输入神经元对所有下一层神经元的权值
self.w = None # 防止后续报错
if layer_size > 1: # 刚好等于1就不需要了
w = uniform(-1, 1, (layers - 1, layer_size, layer_size)) # 每一层都大小+1
# 运行过程中的变量(注意有了BN层不需要偏置了)
delta = np.zeros((batch_size, layers, layer_size, 1), dtype=float) # 前面每一层都要+1
delta_last = np.zeros((batch_size, out_features, 1), dtype=float) # 每一列是一层的δ
out_last = np.ones((batch_size, out_features, 1), dtype=float) # 每一列是一层的output
out = np.ones((batch_size, layers, layer_size, 1), dtype=float)
out_softmax = np.ones((batch_size, out_features, 1), dtype=float) # 经过softmax得到的结果
norm_gamma = np.ones((layers, layer_size, 1), dtype=float)
norm_gamma_last = np.ones((out_features, 1), dtype=float) # BN的γ
norm_beta = np.zeros((layers, layer_size, 1), dtype=float)
norm_beta_last = np.zeros((out_features, 1), dtype=float) # BN的β
ivar = np.zeros((layers, layer_size, 1), dtype=float) # 1/sqrt(σ^2+eps)
ivar_last = np.zeros((layers, out_features, 1), dtype=float) # 1/sqrt(σ^2+eps)
x_hat = np.zeros((batch_size, layers, layer_size, 1), dtype=float)
x_hat_last = np.zeros((batch_size, out_features, 1), dtype=float) # 每一列是一层的output
# 下面是运行过程中需要统计的均值和标准差
running_mmu = np.zeros((layers, layer_size, 1), dtype=float)
running_mmu_last = np.zeros((out_features, 1), dtype=float)
running_var = np.zeros((layers, layer_size, 1), dtype=float)
running_var_last = np.zeros((out_features, 1), dtype=float)
# 开始迭代
loss_list = []
for epoch in range(1, 1 + epochs):
loss = 0
cnt = 0
pbar = tqdm(zip(X, Y))
for idx, (x, y) in enumerate(pbar):
# 前向传播
# 输入->...layers->layer_-1->softmax->argmax()
for layer in range(layers + 2):
# 先标准化再激活
if layer == 0: # 第一层
xx = (w_first.T @ x)
out[:, layer, :], tmp, mmu, var, x_hat_ = self.train_normlize(
x=xx, gamma=norm_gamma[layer], beta=norm_beta[layer])
out[:, layer, :] = self.acti_func(out[:, layer, :])
x_hat[:, layer, :] = x_hat_
ivar[layer] = tmp
running_var[layer] = running_var[layer] * (1 - self.new_rate) + var * self.new_rate
running_mmu[layer] = running_mmu[layer] * (1 - self.new_rate) + mmu * self.new_rate
elif layer < layers: # 不是最后一层
xx = (w[layer - 1].T @ out[:, layer - 1])
out[:, layer, :], tmp, mmu, var, x_hat_ = self.train_normlize(
x=xx, gamma=norm_gamma[layer], beta=norm_beta[layer])
out[:, layer, :] = self.acti_func(out[:, layer, :])
x_hat[:, layer, :] = x_hat_
ivar[layer] = tmp
running_var[layer] = running_var[layer] * (1 - self.new_rate) + var * self.new_rate
running_mmu[layer] = running_mmu[layer] * (1 - self.new_rate) + mmu * self.new_rate
elif layer == layers: # 最后一层隐藏层到输出层
xx = w_last.T @ out[:, layer - 1]
out_last[:, :, :], tmp, mmu, var, x_hat_ = self.train_normlize(
x=xx, gamma=norm_gamma_last, beta=norm_beta_last)
out_last = self.acti_func(out_last)
ivar_last = tmp
x_hat_last[:, :, :] = x_hat_
running_var_last = running_var_last * (1 - self.new_rate) + var * self.new_rate
running_mmu_last = running_mmu_last * (1 - self.new_rate) + mmu * self.new_rate
else:
out_softmax = self.softmax(out_last)
# 反向传播
for layer in range(layers, -1, -1): # layers,...,0
# 计算出每一层的损失
if layer == layers: # 最后一层(输出层),这里直接用softmax层计算得到
# print('输出层')
if activation == 'sigmoid':
delta_last = out_last * (1 - out_last) * (out_softmax - y)
# 分类的导数实际和回归的一样,只不过多了个softmax过程,实际上还是一样的
elif activation == 'rule':
deriva = np.ones_like(out_last)
deriva[np.where(out_last < 0)] = 0
delta_last = deriva * (out_softmax - y)
elif layer == layers - 1: # 隐藏层最后一层,连接输出层
# print('最后一层隐藏')
if activation == 'sigmoid':
delta[:, layer] = out[:, layer] * (1 - out[:, layer]) * (w_last @ delta_last)
elif activation == 'rule':
deriva = np.ones_like(out[:, layer])
deriva[np.where(out[:, layer] < 0)] = 0
delta[:, layer] = deriva * (w_last @ delta_last)
else: # 最后一层
# print('隐藏')
if activation == 'sigmoid':
delta[:, layer] = out[:, layer] * (1 - out[:, layer]) * (
w[layer] @ delta[:, layer + 1]) # 只有1-n会继续前向传播
elif activation == 'rule':
deriva = np.ones_like(out[:, layer])
deriva[np.where(out[:, layer] < 0)] = 0
delta[:, layer] = deriva * (w[layer] @ delta[:, layer + 1])
# 更新系数(w和两个BN参数)
for layer in range(layers + 1):
if layer == 0: # 输入-隐藏
# print('输入-隐藏')
x_hat_ = x_hat[:, layer, :] # x_hat少一行1(相比x)
det_gamma = np.sum(x_hat_ * delta[:, layer, :], axis=0) # batch,rows-1,1 x rows-1,1
det_beta = np.sum(delta[layer, :], axis=0) # beta其实跟b是一样的(本来有了BN层的偏置就不需要b了)
var_sqr = ivar[layer] # rows,1
dxhat = norm_gamma[layer] * delta[:, layer, :] # γ(do/dx_hat)*δ(dL/do)
dx = 1 / batch_size * var_sqr * (batch_size * dxhat - np.sum(dxhat, axis=0) -
x_hat_ * np.sum(dxhat * x_hat_, axis=0))
det_w = x @ dx.transpose([0, 2, 1])
det_w = np.mean(det_w, axis=0)
w_first = w_first - alpha * det_w # O_{Layer-1,i}δ_{Layer,j}
norm_gamma[layer] -= self.alpha_BN * det_gamma
norm_beta[layer] -= self.alpha_BN * det_beta
elif layer < layers: # 隐藏-隐藏
# print('隐藏-隐藏')
x_hat_ = x_hat[:, layer, :] # x_hat少一行1(相比x)
det_gamma = np.sum(x_hat_ * delta[:, layer, :], axis=0) # batch,rows-1,1 x rows-1,1
det_beta = np.sum(delta[layer, :], axis=0) # beta其实跟b是一样的(本来有了BN层的偏置就不需要b了)
var_sqr = ivar[layer] # rows,1
dxhat = norm_gamma[layer] * delta[:, layer, :] # γ(do/dx_hat)*δ(dL/do)
dx = 1 / batch_size * var_sqr * (batch_size * dxhat - np.sum(dxhat, axis=0) -
x_hat_ * np.sum(dxhat * x_hat_, axis=0))
det_w = out[:, layer - 1] @ dx.transpose([0, 2, 1])
det_w = np.mean(det_w, axis=0)
w[layer - 1] = w[layer - 1] - alpha * det_w # O_{Layer-1,i}δ_{Layer,j}
norm_gamma[layer] -= self.alpha_BN * det_gamma
norm_beta[layer] -= self.alpha_BN * det_beta
else: # 隐藏-输出
# print('隐藏-输出')
x_hat_ = x_hat_last # x_hat少一行1(相比x)
det_gamma = np.sum(x_hat_ * delta_last, axis=0) # batch,rows-1,1 x rows-1,1
det_beta = np.sum(delta_last, axis=0) # beta其实跟b是一样的(本来有了BN层的偏置就不需要b了)
var_sqr = ivar_last # rows,1
dxhat = norm_gamma_last * delta_last # γ(do/dx_hat)*δ(dL/do)
dx = 1 / batch_size * var_sqr * (batch_size * dxhat - np.sum(dxhat, axis=0) -
x_hat_ * np.sum(dxhat * x_hat_, axis=0))
det_w = out[:, layer - 1] @ dx.transpose([0, 2, 1])
det_w = np.mean(det_w, axis=0)
w_last = w_last - alpha * det_w # O_{Layer-1,i}δ_{Layer,j}
norm_gamma_last -= self.alpha_BN * det_gamma
norm_beta_last -= self.alpha_BN * det_beta
soft_fal = np.argmax(out_softmax, axis=1).flatten()
y_fal = np.argmax(y, axis=1).flatten()
cnt += np.where(soft_fal == y_fal)[0].size
this_loss = self.loss_func(out_softmax, y)
loss += this_loss / batch_size # 平均每个样本误差
print('当前训练轮整体准确率:%.2f%%' % (100 * cnt / (batch_size * len(X_train))))
loss_list.append(loss / samples) # 样本平均误差
print('epoch %d loss:%.6f' % (epoch, loss / samples))
running_var *= batch_size / (batch_size - 1)
running_var_last *= batch_size / (batch_size - 1) # 无偏估计预测
# 保存参数
self.w_first = w_first
self.w_last = w_last
self.w = w
self.in_features = in_features
self.out_features = out_features
self.layers = layers
self.layer_size = layer_size
self.running_mmu = running_mmu
self.running_mmu_last = running_mmu_last
self.running_var = running_var
self.running_var_last = running_var_last
self.norm_gamma = norm_gamma
self.norm_gamma_last = norm_gamma_last
self.norm_beta = norm_beta
self.norm_beta_last = norm_beta_last
if epoch % test_epoch == 0: # 一轮测试一次
if test_x is None or test_y is None:
continue
print('(!) test...')
pred = self.predict(test_x)
display_num = 5 # 显示的个数
for i in range(display_num):
print('pred=', pred[i], ' true=', test_y[i])
acc = accuracy_score(test_y.reshape(-1, 1), pred.reshape(-1, 1))
print('acc=%.2f' % (acc))
plt.plot(loss_list)
plt.show()
def predict(self, X):
print('test size:',X.shape)
w_first = self.w_first
w_last = self.w_last
w = self.w
layers = self.layers
out_features = self.out_features
layer_size = self.layer_size
batch_size = X.shape[1] # 得到batch的大小
running_mmu = self.running_mmu
running_mmu_last = self.running_mmu_last
running_var = self.running_var
running_var_last = self.running_var_last
norm_gamma = self.norm_gamma
norm_gamma_last = self.norm_gamma_last
norm_beta = self.norm_beta
norm_beta_last = self.norm_beta_last
out_last = np.ones((batch_size, out_features, 1), dtype=float) # 每一列是一层的output
out = np.ones((batch_size, layers, layer_size, 1), dtype=float)
out_softmax = np.ones((batch_size, out_features, 1), dtype=float) # 经过softmax得到的结果
res = np.zeros((X.shape[0], batch_size, 1), dtype=int)
for idx, x in enumerate(X):
# 前向传播
for layer in range(layers + 2):
if layer == 0: # 第一层
out[:, layer, :] = ((w_first.T @ x) - running_mmu[layer, :]) / np.sqrt(
running_var[layer, :] + self.eps)
out[:, layer, :] = norm_gamma[layer] * out[:, layer, :] + norm_beta[layer]
out[:, layer, :] = self.acti_func(out[:, layer, :])
elif layer < layers: # 不是最后一层
out[:, layer, :] = ((w[layer - 1].T @ out[:, layer - 1]) - running_mmu[layer, :]) / np.sqrt(
running_var[layer, :] + self.eps)
out[:, layer, :] = norm_gamma[layer] * out[:, layer, :] + norm_beta[layer]
out[:, layer, :] = self.acti_func(out[:, layer, :])
elif layer == layers: # 最后一层隐藏层到输出层
out_last = (w_last.T @ out[:, layer - 1] - running_mmu_last) / np.sqrt(running_var_last + self.eps)
out_last = norm_gamma_last * out_last + norm_beta_last
out_last = self.acti_func(out_last)
else:
out_softmax = self.softmax(out_last)
output = np.argmax(out_softmax, axis=1)
res[idx] = output
return res
if __name__ == '__main__':
print('******** minist手写数据集分类 *********')
X_train, y_train, X_test, y_test = load_data(if_reload=True) # 获取标准化后的数据
myNet = MyNet()
myNet.fit(X_train, y_train, test_x=X_test, test_y=y_test, epochs=5, test_epoch=1, alpha=0.01, layers=2, layer_size=200,
activation='rule')
print('训练完毕')
print('test...')
pred = myNet.predict(X_test)
display_num = 5 # 显示的个数
for i in range(display_num):
print('pred=', pred[i], ' true=', y_test[i])
acc = accuracy_score(y_test.reshape(-1, 1), pred.reshape(-1, 1))
print('acc=%.2f' % (acc))
差不多就是这样了,有什么问题的话可以欢迎指出