使用背景
当我们需要把图像进行放大或者缩小的时候,第一反应是使用resize()实现。很多情况下,我们会调用最近邻插值和双线性插值去放大图片,当然要说没有分辨率的损失那是不可能的,只能说在放大图片的过程中尽可能增加了图片的分辨率。这里介绍这两种放大图片尺寸的方法代码,并说明其中优缺点同时看效果,最后再做一个对比和总结。
- 最近邻插值方法
- 双线性插值方法
- 总结
为了更好的展现出插值方法的效果,先利用切边操作把图片设置为(350,350)大小,再各利用插值法把图片的height和weigth各扩大一倍为(700,700),之后比较原始图片和使用了插值方法图片的分辨率或者说清晰度。切片值设置因图而异。代码如下。
img=cv2.imread(r'C:\Users\ZFG\PycharmProjects\Lenet_test\orinal.jpg')
print(img.shape[:2]) #输出为(1491, 1080)
img=img[650:1000,200:550]
print(img.shape[:2]) #输出为(350, 350)
cv2.imwrite(r'C:\Users\ZFG\PycharmProjects\Lenet_test\test.jpg',img) #保存图片在命名为test
cv2.imshow('orinal',img)
cv2.waitKey(0)
最近邻插值方法
代码如下所示可以实现:
import numpy as np
import cv2
def function(img):
height,width,channels=img.shape #获得高宽三颜色通道三个值
empty=np.zeros((700,700,channels),np.uint8) #设置一个(700,700)大小的三维0数组
sh=700/height
sw=700/width
for i in range(700):
for j in range(700):
x=int(i/sh)
y=int(j/sw)
empty[i,j]=img[x,y]
return empty
img=cv2.imread(r'C:\Users\ZFG\PycharmProjects\Lenet_test\test.jpg')
cv2.imshow('origin',img)
zoom=function(img)
cv2.imshow('bigger1',zoom)
cv2.waitKey(0)
最后结果如下图所示:

结论:
- 优点:算法容易实现,时空复杂度较小,运行较快
- 缺点:放大后轮廓锯齿状较多,效果一般
双线性插值方法
代码如下所示可以实现:
import numpy as np
import cv2
def bilinear_interpolation(img,out): #out为希望输出大小
src_h, src_w, channel = img.shape #获取三通道
dst_h, dst_w = out[1], out[0]
if src_h == dst_h and src_w == dst_w:
return img.copy()
dst_img = np.zeros((dst_h,dst_w,3),dtype=np.uint8)
scale_x, scale_y = float(src_w) / dst_w, float(src_h) / dst_h
for i in range(3):
for dst_y in range(dst_h):
for dst_x in range(dst_w):
# find the origin x and y coordinates of dst image x and y
# use geometric center symmetry
# if use direct way, src_x = dst_x * scale_x
src_x = (dst_x + 0.5) * scale_x - 0.5
src_y = (dst_y + 0.5) * scale_y - 0.5
# find the coordinates of the points which will be used to compute the interpolation
src_x0 = int(np.floor(src_x))
src_x1 = min(src_x0 + 1 ,src_w - 1)
src_y0 = int(np.floor(src_y))
src_y1 = min(src_y0 + 1, src_h - 1)
# calculate the interpolation
temp0 = (src_x1 - src_x) * img[src_y0,src_x0,i] + (src_x - src_x0) * img[src_y0,src_x1,i]
temp1 = (src_x1 - src_x) * img[src_y1,src_x0,i] + (src_x - src_x0) * img[src_y1,src_x1,i]
dst_img[dst_y,dst_x,i] = int((src_y1 - src_y) * temp0 + (src_y - src_y0) * temp1)
return dst_img
if __name__ == '__main__':
img = cv2.imread(r'C:\Users\ZFG\PycharmProjects\Lenet_test\test.jpg')
cv2.imshow('orinal',img)
dst = bilinear_interpolation(img,(700,700))
cv2.imshow('test',dst)
cv2.waitKey()
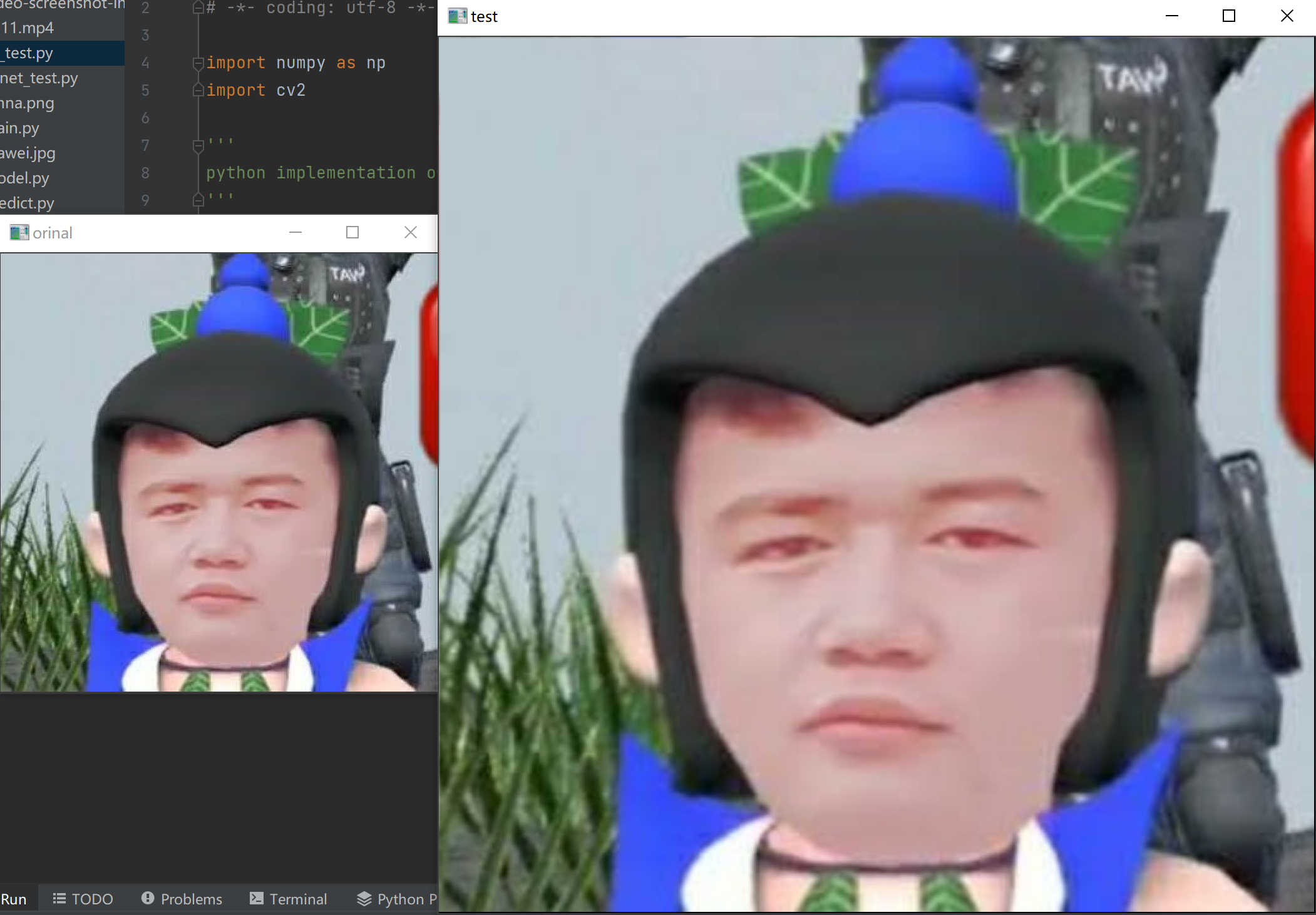
最后结果如下图所示:
结论:
- 优点:图像几乎不失真,放大后分辨率也非常高
- 缺点:算法不易实现,时空复杂度大,运行很慢,对CPU要求较高,大批处理耗费算力大
总结
在实际操作中,选用最近邻插值方法和双线性插值方法的时候,不需要这么多源码实现,只需要在resize()的时候调用opencv-cv2的方法就可以实现方法。如resize(img,(700,700),cv2.INTER_NEAREST)为最近邻插值法,resize(img,(700,700),cv2.INTER_LINEAR)为双线性插值法。在实际过程中,需要高分辨率则用双线性插值法,但是这样需要耗费较多CPU,选用最近邻插值法运行很快但是图像有些许失真。所以具体选用哪种方法,根据实际情况衡量好精度和算力。
- 注:由于图片本身分辨率不高,所以看上去可能区别不大,但是对于电脑而言,在进行识别或者分割等操作时,差别还是很大的。