1 背景
笔者在上周发布的博客《自动驾驶---低速场景之记忆泊车》中,大体介绍了记忆泊车中的整体方案,其中详细阐述了planning模块的内容,全局规划及局部规划(会车)等内容,包括使用的算法,但是没有深入详细地展开讲述OpenSpace规划算法,因此在本篇博客中,详细讲解该部分内容。
OpenSpace规划主要涉及到自动驾驶车辆在开放、非结构化环境中的路径规划问题。这种规划对于没有固定参考线的场景特别重要,比如自主泊车、路边停车,城区路口掉头等。
在OpenSpace规划中,算法的核心是根据感知信息和感兴趣区域(ROI)来生成和选择最佳的行驶路径。感知信息主要包括周围动静态障碍物的位置、速度等信息,而ROI则包含了地图信息,比如道路边界、车位边界等。
OpenSpace规划算法的基本流程如下:
- 生成可行驶区域:根据感知数据和地图信息,算法首先会确定车辆可以安全行驶的区域。这通常涉及到对道路边界、障碍物位置等信息的解析和处理。
- 路径搜索与选择:在确定了可行驶区域后,算法会在这个区域内搜索可能的行驶路径。这个过程可能会使用到各种路径搜索算法,比如A*算法或其变种。搜索到的路径会基于一定的评价标准(比如安全性、效率等)进行排序和选择。
- 轨迹优化:选定了路径后,算法还需要对车辆的行驶轨迹进行优化,以确保车辆在行驶过程中的平稳性和舒适性。这通常涉及到对车辆运动学模型和动力学模型的考虑,以及使用优化算法来求解最优的轨迹。
此外,OpenSpace规划还需要考虑一些额外的因素,比如交通规则、行人和其他车辆的动态行为等。这些因素都可能对车辆的行驶路径产生影响,因此需要在规划过程中进行充分的考虑和处理。
OpenSpace规划是自动驾驶技术中的一个重要环节,它能够帮助车辆在没有固定参考线的开放环境中实现安全、高效的行驶。随着自动驾驶技术的不断发展,OpenSpace规划也将不断优化和完善,以适应更加复杂和多变的环境。
2 OpenSpace规划算法介绍
OpenSpace规划在自动驾驶中涵盖了多种算法,这些算法共同协作以在开放、非结构化环境中实现安全、高效的路径规划。以下是一些主要的OpenSpace规划算法:
-
Hybrid A*算法:
- A*算法:传统的A*算法是一种广泛使用的路径搜索算法,它能够在给定的图或网格中找到从起点到终点的最短路径。
- Hybrid A*算法:针对自动驾驶场景,混合A*算法结合了A*算法与车辆运动学模型,考虑了车辆的实际运动约束,从而生成更符合车辆行驶特性的路径。
-
OBCA算法:
- MPC预测模型:模型预测控制(MPC)是一种优化控制方法,用于处理具有约束的线性或非线性系统。在OBCA算法中,MPC预测模型用于预测车辆在未来一段时间内的状态,为路径规划提供基础。
- MPC约束设计:约束设计是确保车辆在行驶过程中遵守交通规则、避免碰撞等的重要步骤。OBCA算法中的MPC约束设计考虑了车辆的运动学约束、避障约束等。
- MPC目标函数设计:目标函数是优化问题的核心,它定义了优化的目标和评价标准。在OBCA算法中,MPC目标函数设计旨在实现路径的平滑性、安全性以及效率性。
-
SCP路径平滑算法:SCP(Sequential Convex Programming)是一种基于凸优化的启发式算法,用于解决非凸优化问题。在OpenSpace规划中,SCP路径平滑算法用于对搜索到的路径进行平滑处理,提高路径的连续性和舒适性。
上述这些算法在OpenSpace规划中各自发挥着重要作用,并相互协作以实现自动驾驶车辆在开放空间中的安全、高效行驶。随着技术的不断发展,新的算法和方法也将不断被引入到OpenSpace规划中,以应对更加复杂和多变的环境。
下面笔者将介绍目前量产中使用比较多的算法:Hybrid A*。从市面上量产的产品及笔者从行业内了解到的信息来看,目前市面上看到华为、大疆、小米和百度使用到该算法,其它家暂时不清楚。
3 Hybrid A*算法介绍
3.1 A*算法介绍
在介绍Hybrid A*之前,笔者会先介绍A*算法,Hybrid A*算法其实是由A*演变而来(A*算法又由D*算法演化而来,这里就不往前追溯了)。
A*算法起源于1968年,由Peter E. Hart、Nilsson和Raphael在他们的论文《A Formal Basis for the Heuristic Determination of Minimum Cost Paths in Graphs》中首次提出,该算法是求解静态路网中最短路径问题的一种有效方法,同时也是解决许多搜索问题的有力工具。
下面先介绍A*算法:
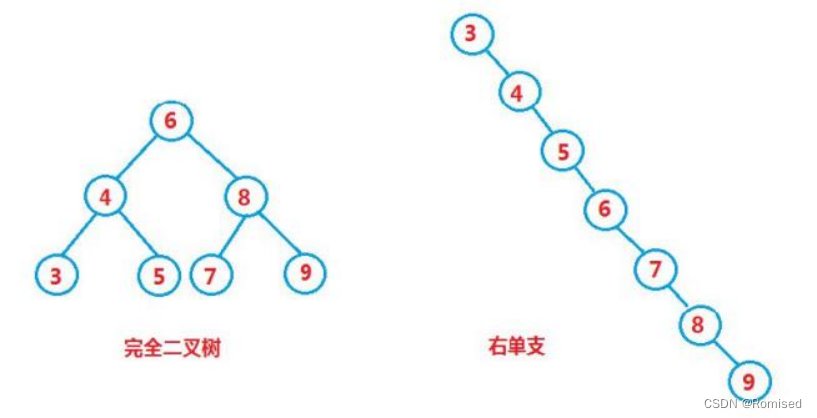
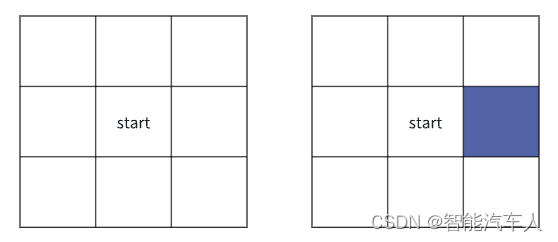
假设start为起始节点,那么在网格中下一步可扩展的节点数量为8个。
关于障碍物,在Grid Map中,如果存在障碍物会将生成的网格状态变成不可用,即在节点选择中为不可选的状态。如下图所示(左边可选节点数量为8,右边可选节点数量为7)。
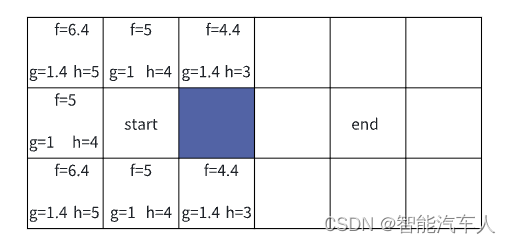
那么如何选择下一个节点呢?因此引入了一个概念:代价函数。
代价函数的意思就是这次选择你,付出的代价是多少,定义为f(n)。在A*中代价函数的定义有两个,第一个是已经走过的路径的代价g(n),另一个是还没有走过的路径的代价h(n)。走过的路径很容易理解,没走过的路径是指从当前节点走到目标节点的距离,在算法中可使用曼哈顿距离或者欧式距离,这里是不考虑障碍物的。
那么最终周围的每一个可用节点都有一个代价值:f(n) = g(n) + h(n),如下图所示。
A*算法的逻辑结构如下:
- 初始化。从上游获取 grid map信息,设置起点 start、终点 end、栅格数量 m*n 等。
- 数据预处理。定义 “待计算子节点” 的数组 openlist 以及 “已选中的节点” 的数组 closelist,保存路径的数组 path_closelist。并且还需建立一个当前子节点集合 children,用来保存当前父节点周围8个子节点的坐标,以及父节点本身 parent;还有保存代价值 g , h , f 的数组openlist_cost 和 closelist_cost。
- 对子节点们 children 中的每个节点 child:若该子节点不在 “待计算子节点” 节点 openlist 中,则追加进去;若在,则计算出该 child 的 g 值,该 g 值是从起点到父节点 parent 的距离加上父节点到该子节点的距离。若该 g 值小于之前 openlist_cost 中的 g 最小值,那么就将openlist_cost 中的最小 g 值更新;
- 由于该代价最小点已经加入了轨迹,因此将该点加入 clost_list 和 path_closelist,并从openlist 中剔除;
- 更新 openlist 中的最小代价值,并以其为父节点开始新一轮搜索。
A*算法最为核心的部分,就在于它的估值函数的设计上:f(n)=g(n)+h(n)。
3.2 Hybrid A*算法
最早的Hybrid A*算法来自于斯坦福大学无人车团队发表的《Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments》。
两者的主要区别如下:
| 算法种类 | 是否考虑障碍物 | 是否考虑运动约束 | 增加的曲线扩展方式 |
| A* | 是 | 否 | 无 |
| Hybrid A* | 是 | 是 | RS曲线 |
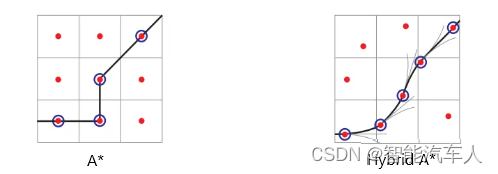
A*以及Hybrid A*节点的扩展方式见下图所示,在Hybrid A*中考虑了车辆的运动学约束,因此扩展出来的轨迹更符合车辆的实际轨迹。
(1)Reeds Shepp曲线
在Hybrid A*中,使用了Reeds Shepp曲线(直线-圆弧的48种组合曲线)去拓展节点,由于Reeds Shepp曲线生成比较简单且快速,所以初始的构造过程是没有考虑碰撞检测的,可以在构造完成后再进行碰撞检测,如果整条轨迹没有碰撞,则放入备选轨迹之中。这里有一个问题可以思考:如果遍历的节点上万个甚至更多,每一个节点都去进行RS扩展的碰撞检测,耗时如何解决?
(2)代价函数的定义
相比A*算法,其中有一个大的变化在于代价函数的使用,在g(n)的计算中,增加了换挡、转向的代价;在h(n)的计算中,采用了两个子函数,h1(n)表示符合车辆运动学约束但是忽略障碍物的最短路径,h2(n)表示满足障碍物约束但是忽略车辆运动学约束的最短路径,取两者之中的最大值。
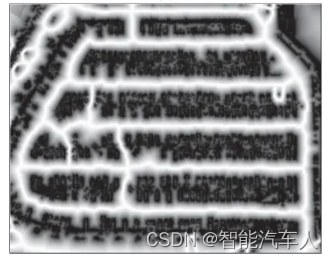
(3)Voronoi势场函数
最后还有一个大的区别:Voronoi势场函数。最终生成的路径保证安全,因此需要距离障碍物有一定的距离。该函数的意义在于:在比较开阔的区域轨迹远离障碍物,在狭窄的区域也可以充分利用空间。
其中, 表示路径节点到最近障碍物的距离,
表示最近的GVD(Generalized Voronoi Diagram)的长度,
来控制势场的衰减率,
控制势场的最大影响范围。如下图所示,颜色越黑的地方说明势场较大。
主要代码如下(展示的是Apollo的源代码,相对原始算法做了一些改动):
bool HybridAStar::Plan(
double sx, double sy, double sphi, double ex, double ey, double ephi,
const std::vector<double>& XYbounds,
const std::vector<std::vector<common::math::Vec2d>>& obstacles_vertices_vec,
HybridAStartResult* result) {
// clear containers
open_set_.clear();
close_set_.clear();
open_pq_ = decltype(open_pq_)();
final_node_ = nullptr;
std::vector<std::vector<common::math::LineSegment2d>>
obstacles_linesegments_vec;
for (const auto& obstacle_vertices : obstacles_vertices_vec) {
size_t vertices_num = obstacle_vertices.size();
std::vector<common::math::LineSegment2d> obstacle_linesegments;
for (size_t i = 0; i < vertices_num - 1; ++i) {
common::math::LineSegment2d line_segment = common::math::LineSegment2d(
obstacle_vertices[i], obstacle_vertices[i + 1]);
obstacle_linesegments.emplace_back(line_segment);
}
obstacles_linesegments_vec.emplace_back(obstacle_linesegments);
}
obstacles_linesegments_vec_ = std::move(obstacles_linesegments_vec);
// load XYbounds
XYbounds_ = XYbounds;
// load nodes and obstacles
start_node_.reset(
new Node3d({sx}, {sy}, {sphi}, XYbounds_, planner_open_space_config_));
end_node_.reset(
new Node3d({ex}, {ey}, {ephi}, XYbounds_, planner_open_space_config_));
if (!ValidityCheck(start_node_)) {
ADEBUG << "start_node in collision with obstacles";
return false;
}
if (!ValidityCheck(end_node_)) {
ADEBUG << "end_node in collision with obstacles";
return false;
}
double map_time = Clock::NowInSeconds();
grid_a_star_heuristic_generator_->GenerateDpMap(ex, ey, XYbounds_,
obstacles_linesegments_vec_);
ADEBUG << "map time " << Clock::NowInSeconds() - map_time;
// load open set, pq
open_set_.emplace(start_node_->GetIndex(), start_node_);
open_pq_.emplace(start_node_->GetIndex(), start_node_->GetCost());
// Hybrid A* begins
size_t explored_node_num = 0;
double astar_start_time = Clock::NowInSeconds();
double heuristic_time = 0.0;
double rs_time = 0.0;
while (!open_pq_.empty()) {
// take out the lowest cost neighboring node
const std::string current_id = open_pq_.top().first;
open_pq_.pop();
std::shared_ptr<Node3d> current_node = open_set_[current_id];
// check if an analystic curve could be connected from current
// configuration to the end configuration without collision. if so, search
// ends.
const double rs_start_time = Clock::NowInSeconds();
if (AnalyticExpansion(current_node)) {
break;
}
const double rs_end_time = Clock::NowInSeconds();
rs_time += rs_end_time - rs_start_time;
close_set_.emplace(current_node->GetIndex(), current_node);
for (size_t i = 0; i < next_node_num_; ++i) {
std::shared_ptr<Node3d> next_node = Next_node_generator(current_node, i);
// boundary check failure handle
if (next_node == nullptr) {
continue;
}
// check if the node is already in the close set
if (close_set_.find(next_node->GetIndex()) != close_set_.end()) {
continue;
}
// collision check
if (!ValidityCheck(next_node)) {
continue;
}
if (open_set_.find(next_node->GetIndex()) == open_set_.end()) {
explored_node_num++;
const double start_time = Clock::NowInSeconds();
CalculateNodeCost(current_node, next_node);
const double end_time = Clock::NowInSeconds();
heuristic_time += end_time - start_time;
open_set_.emplace(next_node->GetIndex(), next_node);
open_pq_.emplace(next_node->GetIndex(), next_node->GetCost());
}
}
}
if (final_node_ == nullptr) {
ADEBUG << "Hybrid A searching return null ptr(open_set ran out)";
return false;
}
if (!GetResult(result)) {
ADEBUG << "GetResult failed";
return false;
}
ADEBUG << "explored node num is " << explored_node_num;
ADEBUG << "heuristic time is " << heuristic_time;
ADEBUG << "reed shepp time is " << rs_time;
ADEBUG << "hybrid astar total time is "
<< Clock::NowInSeconds() - astar_start_time;
return true;
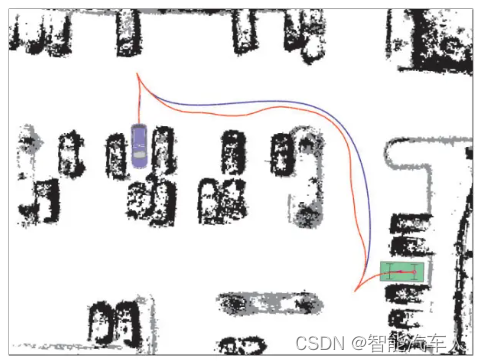
}由Hybrid A*生成的粗糙轨迹是不能直接给控制使用的,需要进行轨迹平滑,平滑的方法有很多种,这里同样可使用行车的平滑方法《自动驾驶---Motion Planning之参考线Path平滑》(非原文中使用的方法)。最终呈现的效果如下:
4 展望
OpenSpace算法不仅适用于泊车场景,也可适用于行车场景。目前各家都在卷城区自动驾驶,那么在城区的狭窄路段需要前后多次调整(比如城市道路常见的U型弯场景,方向盘打到最大无法一次性通过,需要多次腾挪),再比如单车道会车的场景,也需要退让的场景,所以掌握OpenSpace方法对于各家公司规划的 “行泊一体” 也是很有帮助的。