【声呐仿真】学习记录1-配置dave、uuv_simulator
- 1.介绍
- 2.配置
- 3.一些场景
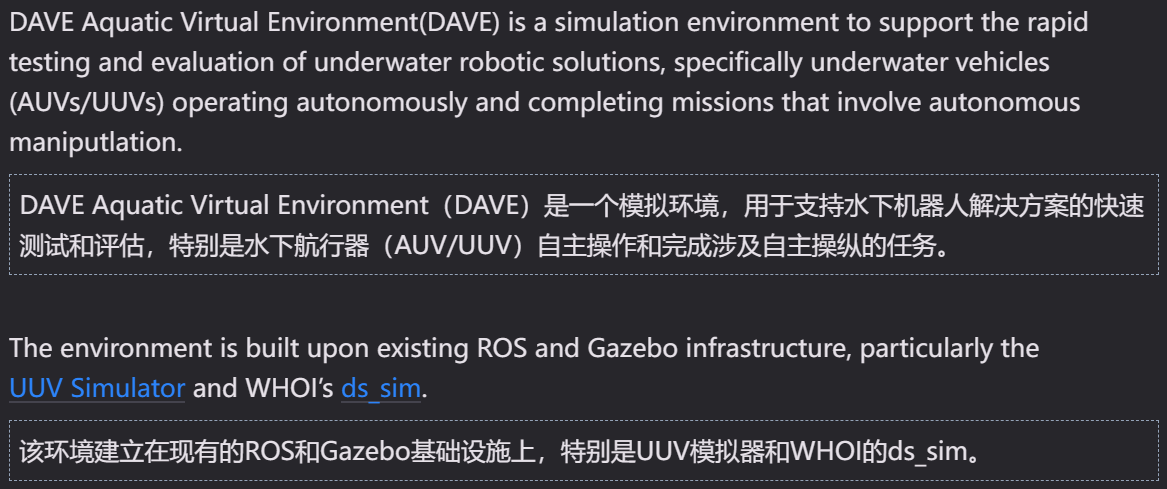
1.介绍
家|DAVE项目 — Home | Project DAVE
2.配置
参考官方教程安装|DAVE项目 — Installation | Project DAVE
mkdir -p ~/uuv_ws/src
cd ~/uuv_ws/src
git clone https://github.com/Field-Robotics-Lab/dave.git
sudo pip3 install -U vcstool
vcs import --skip-existing --input dave/extras/repos/dave_sim.repos .
vcs import --skip-existing --input dave/extras/repos/multibeam_sim.repos .
如果下载失败的话,可以分开手动下载:
https://github.com/Field-Robotics-Lab/dave.git
https://github.com/Field-Robotics-Lab/dockwater.git
https://github.com/Field-Robotics-Lab/ds_msgs.git
https://github.com/Field-Robotics-Lab/ds_sim.git
https://github.com/uuvsimulator/eca_a9.git
https://github.com/uuvsimulator/rexrov2.git
https://github.com/field-robotics-lab/uuv_manipulators
https://github.com/field-robotics-lab/uuv_simulator
https://github.com/field-robotics-lab/nps_uw_multibeam_sonar
https://github.com/apl-ocean-engineering/hydrographic_msgs.git
pip3 install -U catkin_tools
cd ..
catkin config --install
catkin build
一个报错:
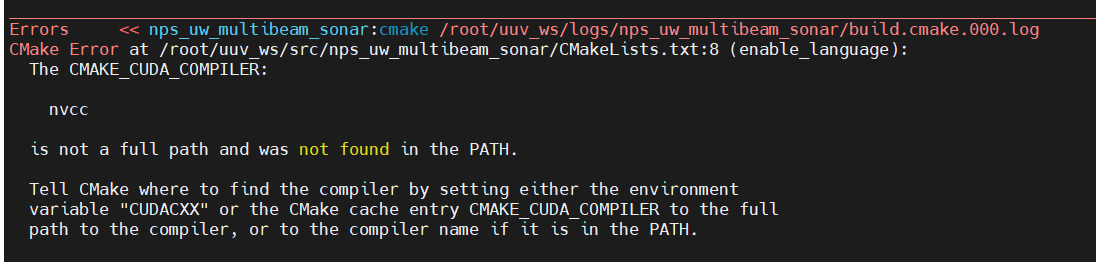
按理说之前安装了CUDA,配置了环境不应该报错,尝试重启了一下ssh,就成功了:

如果没有解决,可尝试:
gedit /root/uuv_ws/src/nps_uw_multibeam_sonar/CMakeLists.txt # 参考上上图红字报错
if (NOT CMAKE_CUDA_COMPILER)
set(CMAKE_CUDA_COMPILER "/usr/local/cuda-9.0/bin/nvcc")
endif()
一些警告,解决了半天还变多了,就先无视吧
source ~/uuv_ws/devel/setup.bash
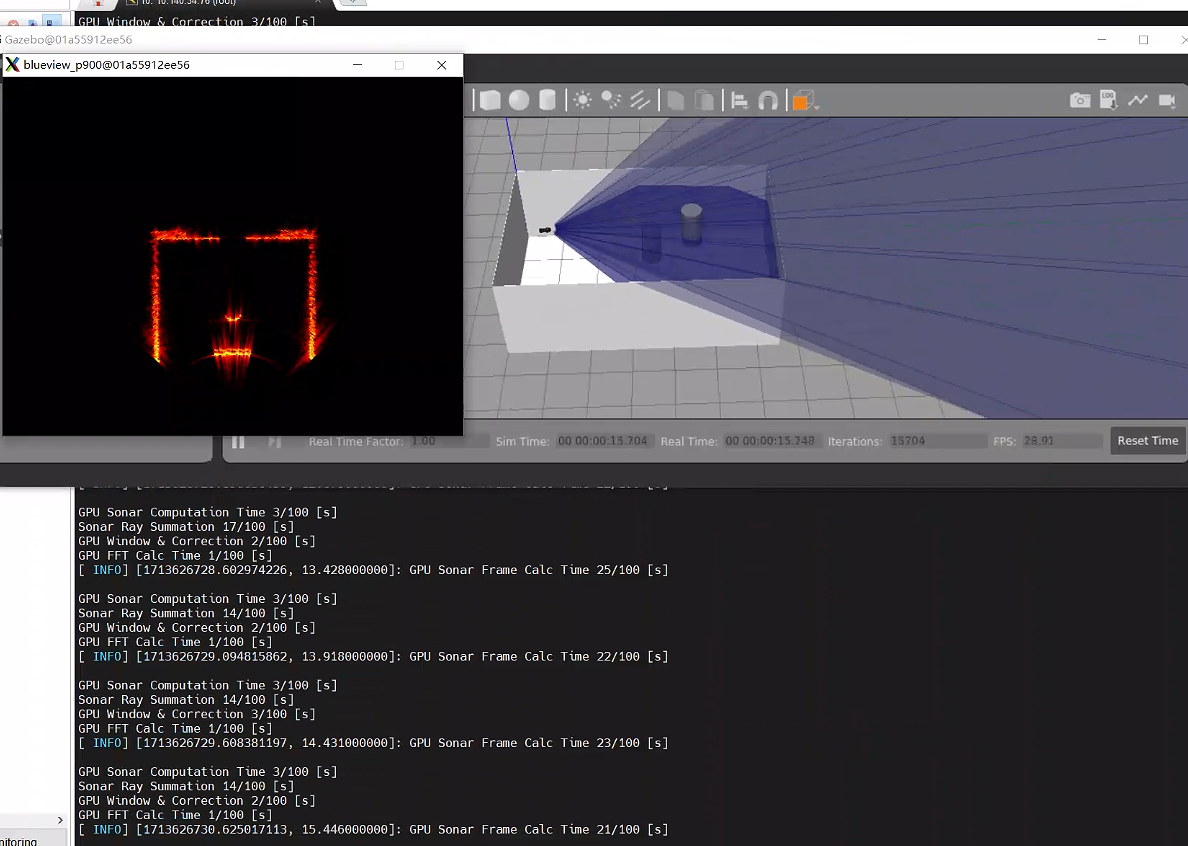
通过运行其中一个Dave演示来测试安装是否正常:
roslaunch nps_uw_multibeam_sonar sonar_tank_blueview_p900_nps_multibeam.launch
运行这个demo,一直报错,目前解决不了:
roslaunch dave_demo_launch dave_demo.launch

URDF集成Gazebo时报错:unknown macro name: xacro:cylinder_inertial_matrix-
如果模拟器不能用Ctrl-C迅速关闭,首先尝试多次按Ctrl-C。如果它仍然没有关闭,您可以在另一个终端窗口中使用以下命令 ,强制立即关闭。
pkill gzclient && pkill gzserver
3.一些场景
启动带海底的世界执行命令:
roslaunch uuv_gazebo_worlds auv_underwater_world.launch
启动赫尔库勒斯沉船的世界执行命令:
roslaunch uuv_gazebo_worlds herkules_ship_wreck.launch
启动湖泊:
roslaunch uuv_gazebo_worlds lake.launch
其他 的一些场景:
roslaunch uuv_gazebo_worlds mangalia.launch
roslaunch uuv_gazebo_worlds munkholmen.launch
roslaunch uuv_gazebo_worlds ocean_waves.launch
——Ubuntu 20.04 安装运行 uuv_simulator