一:功能概述
1.1 功能简介
复合升降机器人是一款集成移动底盘、机械臂、末端执行器、边缘计算平台等机构形成的教学科研平台,可实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法功能和应用,提供例如移动视觉抓取,智慧零售等丰富的控制案例和开放式的软件框架,支持用户针对使用场景进行特定应用开发。平台各部件尽量采用一体化集成设计,方便维护,节省空间;拥有方便易懂的人机交互界面,便于学习者能够更快的了解系统;提供多种二次开发形式,便于使用者快速利用平台适配自己的方案内容。
复合升降机器人教学科研平台可开展虚拟仿真及真实场景实验,满足机器人操作系统及机器人运动学等课程教学实训要求,并支持专业实训、课程设计、毕业设计等实训环节的教学,契合高校机器人工程、人工智能等专业建设需求;此外,复合升降机器人具备强劲综合性能和广泛适用性,内置丰富算法和软件应用,为科研人员提供了广阔的探索空间与实践载体,是科研院所开展前沿课题研究、理论实验和应用开发的首选平台。

1.2产品应用案例
复合升降机器人教学科研平台针对物流仓储、无人货柜等应用场景,提供一体化复合机器人集成方案,实现机器人在结构化场景内,进行无轨导航及路径规划,同时满足三维空间作业能力的需求,实现全范围、大空间的自主移动、自主动态抓取。

仓储物流

安全巡检

新零售
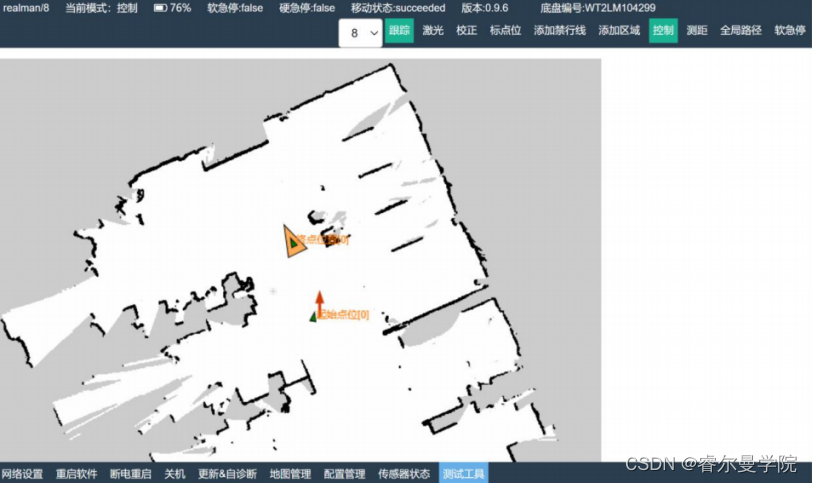
以服务取货场景为例,需要复合升降机器人进行移动抓取可以,使用复合升降机器人先通过底盘到达指定地点。
待收到到达信号后,使用相机观测周围环境,寻找目标物体
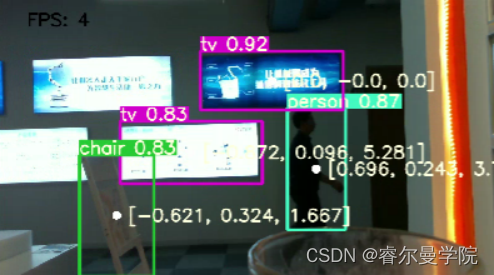
待检测到目标物体,计算目标物体在机械臂基坐标系下的坐标,然后向复合升降机器人发布目标位置,调用机械臂运动接口与夹爪控制接口,抓取目标物体。

最后运输抓取的物体,到达放置地点,通过机械臂接口控制机械臂放置物品到指定地点,完成复合升降机器人移动抓取放置场景功能。

1.3产品特点
1.3.1产品背景
2023年1月 《“机器人+”应用行动实施方案》指出, 当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。预计到2025年,制造业机器人密度较2020年实现翻番,服务机器人、特种机器人行业应用深度和广度显著提升,机器人促进经济社会高质量发展的能力明显增强。
政策聚焦制造业、农业、建筑、能源、商贸物流、医疗健康、养老服务、教育、商业社区服务和安全应急和极限环境应用10大重点领域,突破100种以上机器人创新应用技术及解决方案,推广200个以上具有较高技术水平、创新应用模式和显著应用成效的机器人典型应用场景,建设一批应用体验中心和试验验证中心。推动各行业、各地方结合行业发展阶段和区域发展特色,开展“机器人+”应用创新实践。搭建国际国内交流平台,形成全面推进机器人应用的浓厚氛围。
为强化“机器人+”应用组织保障,国家大力提倡培养引进机器人应用高端研发人才和标准化人才,加强人才国际交流,打造领军人才和创新团队。鼓励机器人企业、用户单位与普通高等院校、科研院所、职业院校等合作,共建人才实习实训基地,联合开展机器人应用人才培养,提供更多就业渠道。组织细分行业机器人应用技能竞赛,发现和培养更多机器人高素质技术技能人才。
1.3.2产品优势
复合升降机器人同时具备商业应用、教学实训及科研实验的特性,是融合应用与科教一体的平台,因此其支持各类型高校专业实训、课程设计、毕业设计等实训环节的教学,也满足各科研院所基础实验测试及二次开发需求,实训平台主要有以下优势:
- 多功能性:复合升降机器人可以执行多种任务,包括装配、拾取、搬运等,而传统工科实训设备往往功能单一,只能完成特定的实验或操作。
- 智能化技术支持:复合升降机器人集成了人工智能技术,例如机器视觉、自主导航、深度学习及大模型等前沿技术,能够实现环境感知和自主决策,提升实验的智能化水平,并且对于前沿的人工智能技术具备良好的适配性,各类最新智能算法及AI解决方案能够轻松在平台上验证,对于高层次人才培养和深度科研探索有坚实的基础支撑。传统设备通常缺乏智能化支持,限制了实验的深度和创新性。
- 灵活性:复合升降机器人的机械臂结构设计灵活,可以在不同工作场景下自由移动和操作,适用于多种实验和项目需求。而传统设备通常固定在实验室中,缺乏灵活性和移动性。
- 自动化程度高:复合升降机器人具备自动化控制功能,能够通过编程实现自动化操作和任务执行,提高实验效率和精度。而传统工科实训设备往往需要手动操作,效率较低且容易受到人为因素影响。
- 跨学科应用:复合升降机器人涵盖了人工智能、控制工程、计算机等多个学科领域的知识和技术,可以为跨学科的实验和项目提供支持。传统工科实训设备往往局限于特定学科领域,无法满足跨学科教学需求。
- 实践创新教学:复合升降机器人为学生提供了实践创新的平台,可以进行项目设计、编程控制、系统集成等实践操作,培养学生的创新能力和实践技能。传统工科实训设备往往缺乏创新性和实践性,难以激发学生的学习兴趣和动手能力。
- 设备迭代更新:复合升降机器人采用模块化组成思想,每个组成部分都能够单独运行使用,因此后续升级与适配十分方便,用户无需整套返厂更新,使用配套器件即可更新硬件与软件。传统工科实训设备通常处于固定安装状态,设备使用效果具有“时效性”。
- 教学资料配套:复合升降机器人教学科研平台配套各类型教学资料,包括实训文档、开发文档、实训讲解视频、二次开发实践视频以及实践讲师现场教学等全面的教学支撑,为客户群体提供人性化与定制化的使用与开发服务。传统工科实训设备配套资料往往形式单一。
- 实训平台生态圈:复合升降机器人教学科研平台提供全方位的生态圈,用户可自行定制与替换各部件,以便完成特定的场景需求,并且复合升降机器人教学科研平台拥有独立的产品生态论坛,用户可以随时在论坛查找相关生态产品资料以及开发资料,极大地减少客户二次开发应用难度及周期。
1.4 配套资源
复合升降机器人配套全面的实训内容与资料,为教育客户群体提供涵盖机器人工程、人工智能、自动化、计算机、通信工程、电子信息等专业的课程教学与实训实验资源,并且提供产品论坛,用户可在论坛中交流与查找相关资料,产品的更新资料也会同步至论坛中,方便用户查收。
1.4.1课程资源
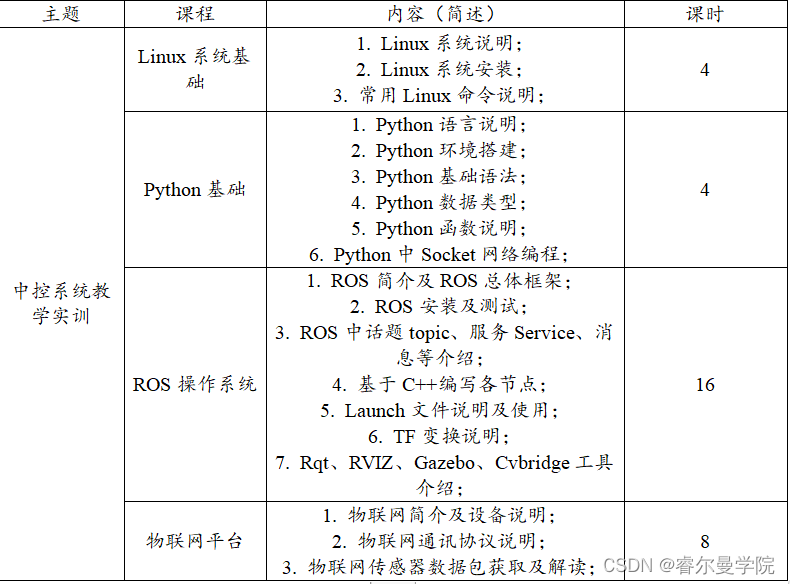
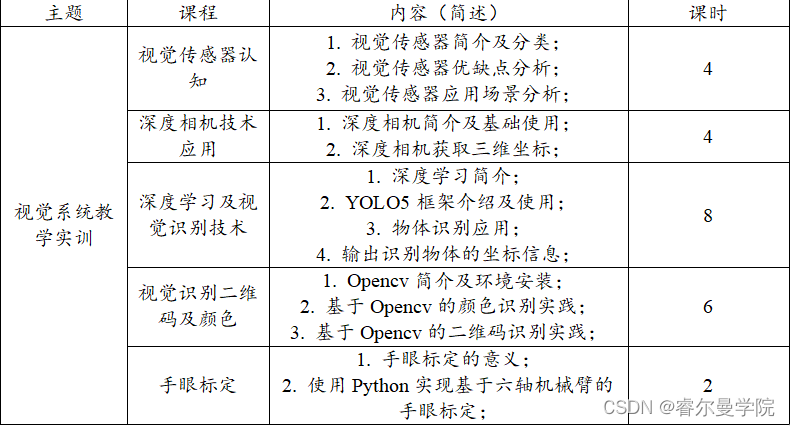
复合升降机器人教学科研平台提供系统性的教学实验实训内容,包括实训文档及实训视频,深入浅出的讲解复合升降机器人相关原理与开发流程,以下是部分课程资源概览:

1.4.2 可开展实训内容
- 机器人组成原理:复合升降机器人通识;
- 安全规范:RM65-B机械臂安全操作规范;
- 机械臂使用:机械臂基本运动指令和TCP标定讲解及练习;
- 操作流程:复合升降机器人运行流程示范与操作;
- 机械臂控制:机械臂语言动作指令编程、外部IO控制、外部轴集成协同控制;
- 机器人建图与导航:激光雷达或摄像头等传感器进行环境建图,并实现自主导航功能;
- 机械臂运动学与动力学:深入理解机械臂的结构、运动学和动力学原理,以及如何应用这些知识进行精确控制和运动规划;
- 视觉识别与目标跟踪:学习使用视觉传感器进行目标检测、识别和跟踪,为机器人赋予智能感知能力,实现更复杂的任务;
- 语言交互:学习ASR→NLP→TTS的语音交互开发流程,掌握语音交互设计实现流程;
- 机器人操作系统:基于复合升降机器人平台学习机器人操作系统ROS(Robot Operating System)与ROS2,掌握ROS通信原理,机器人功能开发原理,并利用ROS进行机器人虚拟仿真实验与真实控制;
- 机器人二次开发:通过机器人各部分API接口、开放外部接口与ROS开源功能包适配各类外部器件,完成指定场景应用与特定功能实现;
1.4.3教学资源与平台
复合升降机器人教学科研平台提供由浅入深的二次开发教学资源以及开发平台,用户可在官网论坛查找相关产品资料,并且开发人员会在论坛中分享二次开发示例源码、开发原理及经验,为用户提供二次开发的技术帮助。
部分教学资源截图如下:

教学资源图1 机械臂实训手册
教学资源图2 机械臂ROS实训手册

教学资源图3 移动底盘实训手册

教学资源图4 实训教学视频
教学资源图5 语音交互实训文档
教学资源图6 视觉识别实训文档

教学资源图7 机械臂实训教学资料

教学资源图8 基础教学资料
教学资源图9 综合实训教学资料
在提供全套的实训资料外,还设置了产品论坛,旨在方便客户及时获取产品最新资料以及二次开发案例,全力辅助用户二次开发,形成良好的产品拓展与开发氛围。

论坛资源图
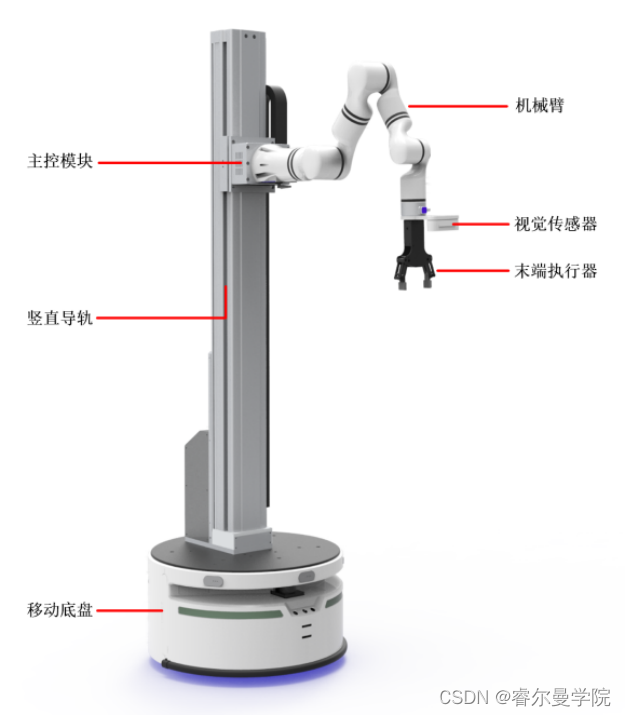
1.5设备组成
(1)复合升降机器人技术实训平台是专门面向科研与教育培训领域的教学实训平台。集成了从机械、电子电气与人工智能等各学科知识内容,学生可以利用平台学习掌握复合升降机器人理论知识,并在现有工作台上验证,帮助学生从理论知识上升到实际操作。此外,研究人员可以依托平台结合已有科研课题,完成科研实验与算法理论验证。
(2)机械臂系统:睿尔曼RM65系列超轻量机械臂,负载5kg自重7.2kg具有超高的负载自重比,无传统控制柜将控制器与机械臂完美融为一体,一体化机械臂仍自带丰富接口满足多种应用需求扩展,提供丰富的API函数库,便于二次开发。末端具备通用接口,灵活扩展,即插即用,一体化机械臂结构且自带丰富接口,满足多行业应用需求扩展。
(3)视觉系统:选用 Intel Realsense D435C深度相机,可直接通过 USB3.0 供电和数据通信,能同时获取深度图像与彩色图像,有效距离0.11m~10m,可满足视觉感知环境需求。使用LX-224HV舵机作为头部旋转关节,可进行头部旋转和俯仰控制,扩大机器人的视野感知范围与操作空间。
(4)移动底盘:采用云迹water2作为复合升降机器人的移动底盘,包含完整成熟感知、认知及定位导航能力。采用伺服轮殻电机及驱动器、智能电源管理系统、抗倾覆力强的六轮悬挂底盘、CAN通信协议和多传感器融合定位技术,极大提高了机器人的定位能力和抗干扰能力。保证机器人在复杂环境下的的精确建图导航、持续供电和物理支撑能力。
(5)升降机构:该部分内置系统的主控模块与语音模块,负责与用户交互、视觉图形处理并控制机械臂、控制移动底盘等设备,为使用者提供开发平台。并在躯干部分增加1个旋转关节,扩到机械臂系统运动范围,增强使用的灵活性和环境适应能力。
(6)主控系统:使用Nvidia Jetson XAVIER NX 模组,该模组预装Ubuntu18.04 系统,配备6核Carmel架构@V8.2 64bit CPU,384 核Volta 架构的GPU及48个 TensorCore,能带来 21TOPS的INT8运算能力,尺寸只有90mm*103mm*35mm。主控模块是整个系统的控制中枢,主要负责给移动底盘、机械臂及其末端执行器发送指令,同时负责机器人系统各模块间的通讯。使用者可以在此主控控制复合升降机器人以及二次开发。
(7)电动夹爪:选取EG2-SF16电动夹爪,舍弃气动夹爪,符合系统设计小巧、美观的原则,避免线缆和设备过多,将执行器直接集成在机械臂末端,与机械臂完成一体化运动控制。
1.6主要技术参数
- 充电电源:单相三线~220V±10% 50Hz
- 工作电压:DC24V
- 工作环境:温度0℃~+50℃ 相对湿度≤85%(25℃) 海拔<4000m
- 平台尺寸:高1630mm
- 有效行程:1m
- 移动速度:1m/s
- 升降速度:150mm/s
- 重量:约85Kg
- 定位精度:±5cm
- 安全保护:具有激光扫描避障、视觉避障、紧急停止等功能
- 对外接口:网口、USB口、HDMI
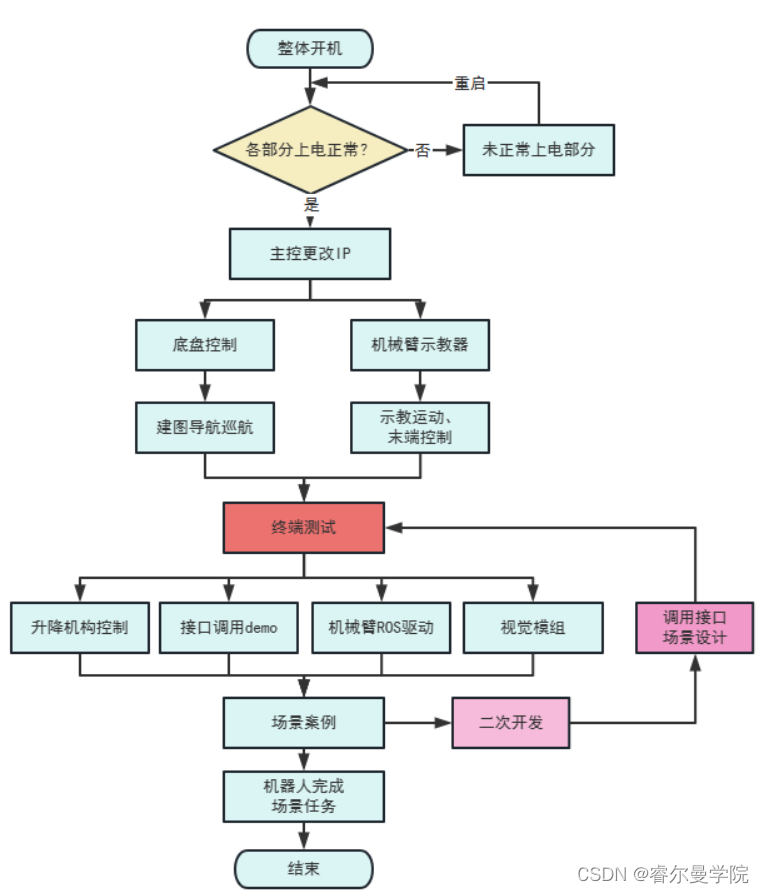
1.7工作流程
二:配置清单一览表

三:方案提供商
3.1公司简介
睿尔曼是一家专注于超轻量仿人机械臂研发、生产及销售的国家高新技术企业,总部位于北京市石景山首特产业园,工厂建于江苏省常州科教城智能数字产业园内,下属另设有睿尔曼智能科技(深圳)有限公司全资子公司。公司集研发、生产、办公于一体,年综合产能20000 台以上。

自2010年起,睿尔曼便踏上了超轻量仿人机械臂的创新之旅,作为该领域的引领者,它始终坚守着产品研发与技术创新的初心。其核心团队汇聚了中国早期机器人底层技术研发的精英,他们在这一领域深耕细作,积累了超过十年的深厚底蕴和丰富经验。正是这样的团队,能够从基因层面进行机械臂的原型设计和底层零部件的自主研发,从而在控制器、驱动器、电机、减速器这四大核心零部件上实现了革命性的突破,打造出具有完全自主知识产权的超轻量仿人机械臂。
如今,睿尔曼的产品已广泛应用于新零售、新餐饮、商业服务、智能巡检、医疗健康、检验检疫、教育科研、工业生产、航空航天等多个领域,其智能、通用模块化的机械臂本体,融合了先进的软硬件与人机交互技术,为客户提供了高性价比、高可靠性、易操作的超轻量仿人机械臂及集成解决方案。
睿尔曼不仅拥有多年的机器人产品研发经验,更与北京航空航天大学、北京理工大学、中国农业大学等多所知名高校建立了紧密的战略合作关系,共同搭建了一个全方位、专业互补的创新研发平台。它始终怀揣着一个梦想:致力于让机械臂成为通用的智能化工具,让机器人走入千家万户,为美好生活助一臂之力!
4.2 公司资质
■北京市“专精特新”中小企业

■高新技术企业

■world检测认证
 ■质量管理体系认证
■质量管理体系认证

■CE认证

■可靠性检测认证
已申请专利113项、发明专利57项、实用新型专利25项、授权专利45项、外观专利7项。

睿尔曼智能高度重视产学合作,旨在为各层次、各类型高校提供全套一站式解决方案与建设方案,目前已和清华大学、北京大学、中山大学等高校建立合作关系,以下是部分合作院校和合作案例。
合作院校(部分)

合作案例(部分)
合作单位:北京石油化工学院——人工智能研究院
合作项目:高质量应用型“人工智能”应用技术实验实训基地建设—智能机器人

合作单位:哈尔滨远东理工学院
合作项目:机器人实训室建设