00ROS实现流程大致分为5步
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。
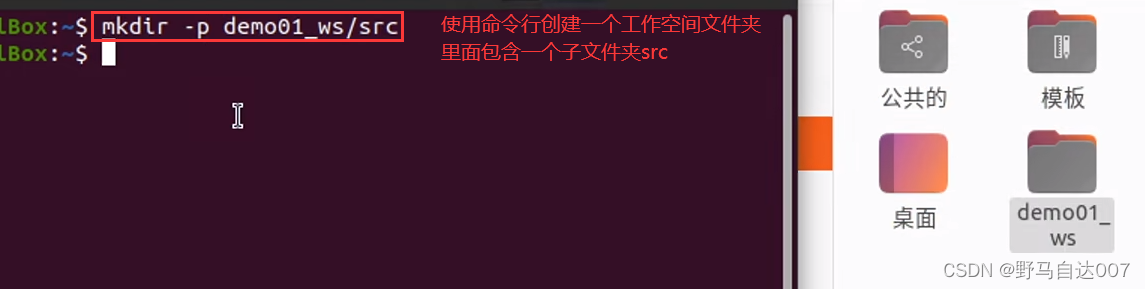
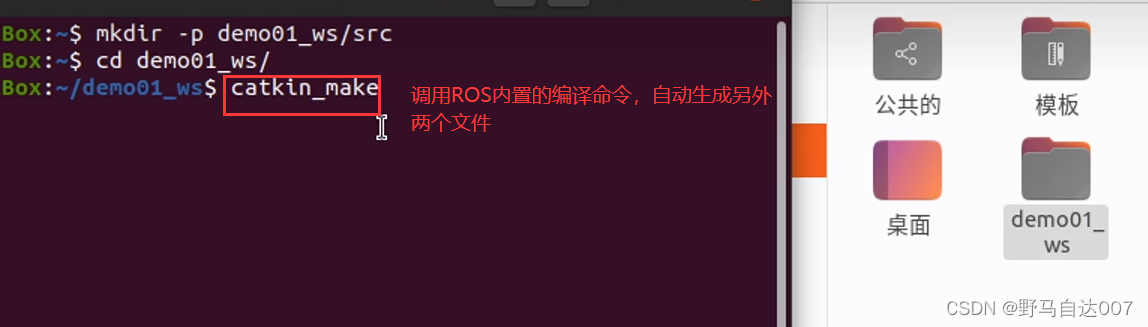
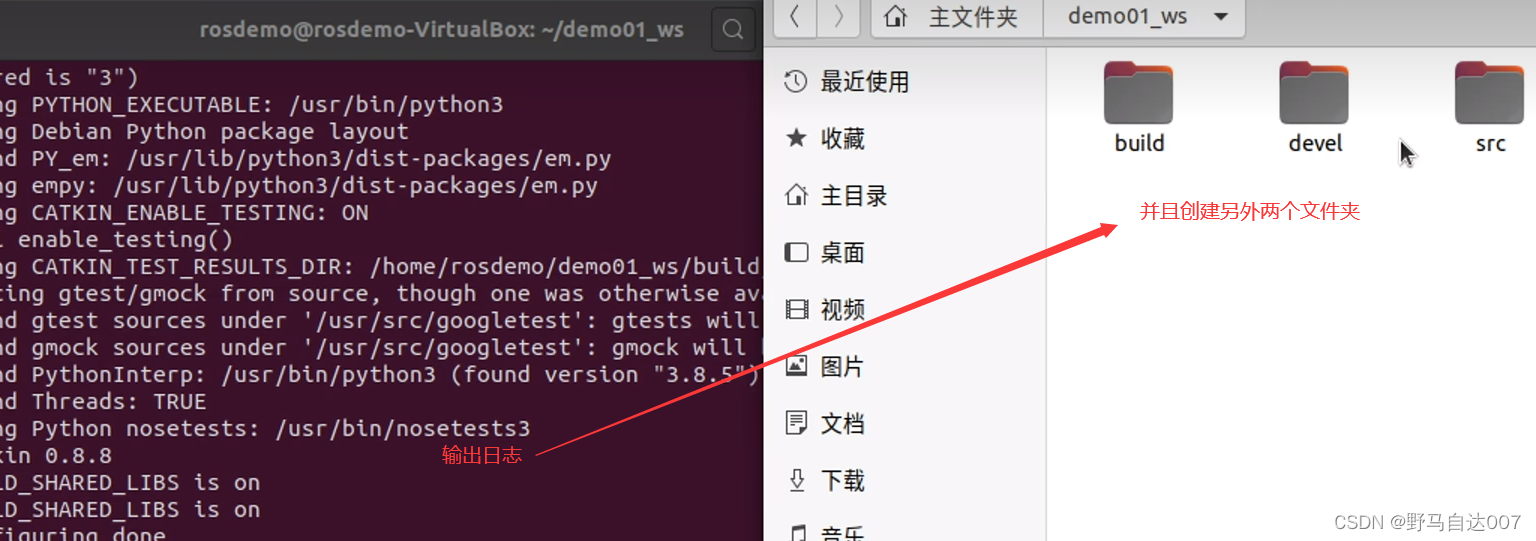
01创建工作空间
02进入src创建ros包并添加依赖
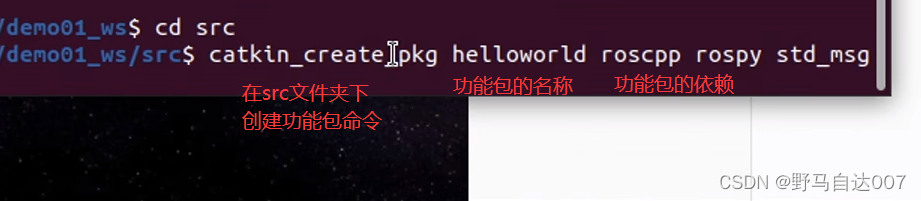
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
00ROS实现流程大致分为5步
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。
01创建工作空间
02进入src创建ros包并添加依赖
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1603085.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!