最近有一个项目,客户需要用户人体姿势识别,进行表演考核用途,或者康复中心用户恢复护理考核,需要用摄像头进行人体四肢进行肢体关键点对比考核,资料还是太少了。只有个别大佬发了部分技术指导。感觉写的不错。
阿里云-视觉智能开放平台提供sdk 服务
视觉智能开放平台
针对人体特性,定制15个肢体关键点,可以精准刻画人物姿态。对环境光、模糊等具有较强鲁棒性。
- 体育健身

- 互动直播

看了以后奈何经费(W–七步包月扛不住啊,需要审核开通使用sdk)有点高。果断放弃了。
百度AI开放平台
人体关键点识别
精准定位人体的21个主要关键点,包含头顶、五官、颈部、四肢主要关节部位;支持人体背面、侧面、中低空斜拍、大动作等复杂场景

-
体育健身

-
娱乐

-
安防

-
百度的可以免费体验使用,这个做的比较好,可能两个平台的侧重点不一样。
首先感谢大佬 【忠文老弟-知乎】
来源于:纯手撸(js+网络摄像头)实现的丐版动捕
视频展示效果
纯手撸(js+网络摄像头)实现的丐版动捕
技术依赖
1、WebRTC读取摄像头数据,这个是web规范,可以直接使用,注意如果不在本机调试(包括手机预览),需要支持Https;
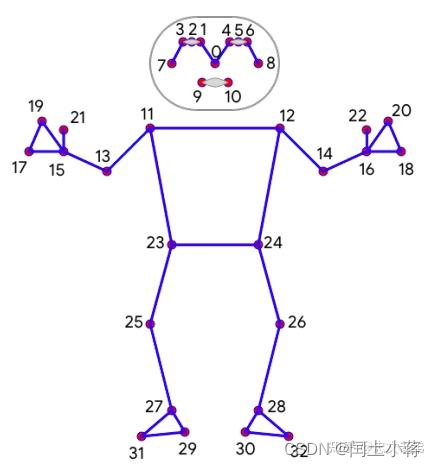
2、Google在2020年推出的神经网络模型BlazePose,可以对图像进行识别,同时给出 关键点 2d坐标值和3d坐标值。其中2d坐标值是相对于输入的图像坐标,3d坐标值是相当于人体臀部中间为原点的 2x2x2的立方体;
3、使用了Three.js作为可视化库和一些基础的数学函数库,再无其他依赖。
解决的问题及核心思路
虽然有了blazePose的加持,已经能够识别人体的姿态,在画布中直接绘制也是相当的方便(因为有了2d坐标),但是他们都没有3d的展示,有也仅仅是直接把3d坐标点直接渲染出来,相当于只有结果。但是对人体结构和动画来说,并不是说知道某个关键点的位置就完了,而是需要知道这些骨骼关节是怎么运动的,最后才达成了这个姿势,同时也不是单纯的 IK(反向运动学)去设置一些关键骨骼的到达点,然后算法直接驱动所有骨骼。因为现在BlazePose模型已经给出了每个关键点的位置,我们是可以通过计算获得骨骼关节的运动形态,从而驱动动画角色。
核心问题就变成了
0、BlazePose模型是对每幅图像直接给出预测值,但是并没有给定初始值,这里需要自己首先从T-Pose获取到位置并作为初始化位置。
1、单段骨骼的长度是不会改变的,因此只能通过关节的弯折、旋转,用来驱动整个身体的姿势变化。
2、对于大臂带动小臂,大腿带动小腿 这种问题,其实只关心的 大臂/小臂 两个关键点位置,而与其他关键点无关。
3、对于上半身的旋转,我们取左右肩膀与原始方向之间进行比较,就可以获得。
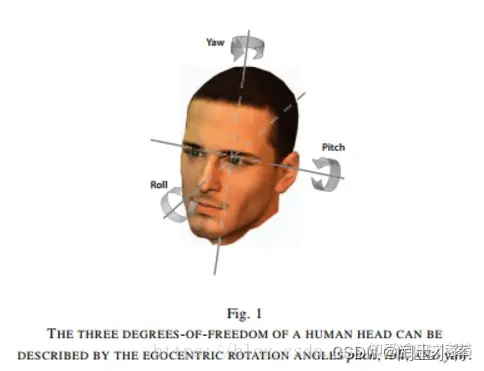
4、对于头部的旋转是最复杂的
头部的关键点坐标值取出来都很小,容易造成一些误差
头部是作为一个整体进行驱动的,所以头部的关键点相对于头部来说是没有变化的,都得统一转化到对于人体原点
根据关键点无法得到头部的原始访问,因此需要通过其他方式设定头部的方向
- 怎么获取头部基础坐标系
5、整个计算过程较长,怎么检测每步的计算逻辑和结果是否正确,因此需要一些辅助性的debug工具
关键代码实现
1、 通过WebRTC获取摄像头视频流
function getMedia() {
const width = window.innerWidth / 2;
const height = window.innerHeight / 2;
let constraints = {
//参数
video: { width, height },
audio: false
};
//获得video摄像头区域
let video = document.getElementById("video");
video.width = width;
video.height = height;
//返回的Promise对象
let promise = navigator.mediaDevices.getUserMedia(constraints);
promise.then(function (MediaStream) {
video.srcObject = MediaStream;
video.play();
});
}
2、THREEJS加载带骨骼的模型,并设置辅助工具
直接使用Threejs自带的 /examples/models/gltf/XBot.glb 就可以,这块基础代码就不贴了,最后的结果如下
3、设置关键点骨骼初始化位置
BlazePose模型好像只能识别偏真人的模型,因此通过blender摆放的动漫的角色截图他是识别不了的,因此我找了一张跟真人比较像的T-Pose照片,用他来设置基础的关键点位置。

通过BlazePose预测,我们取到了一些想要的关键点,并进行和XBot模型绑定并设置初始化
let boneObj = {}
let viewModel;
const loader = new THREE.GLTFLoader();
loader.load('./Xbot.glb', function (gltf) {
model = gltf.scene;
scene.add(model);
viewModel = model;
bones = model.children[0].children[0]
// 关键点由模型根据上面的T-Pose预测并绑定
boneObj['left-shoulder'] = { bone: bones.getObjectByName('mixamorigLeftShoulder'), initPos: new THREE.Vector3(0.16728906333446503, -0.4775106608867645, -0.2042236328125) }
boneObj['left-arm'] = { bone: bones.getObjectByName('mixamorigLeftArm'), initPos: new THREE.Vector3(0.38952040672302246, -0.4693129360675812, -0.207763671875) }
boneObj['left-fore-arm'] = { bone: bones.getObjectByName('mixamorigLeftForeArm'), initPos: new THREE.Vector3(0.5944491624832153, -0.4565984904766083, -0.315185546875) }
boneObj['right-shoulder'] = { bone: bones.getObjectByName('mixamorigRightShoulder'), initPos: new THREE.Vector3(-0.17201489210128784, -0.4690127372741699, -0.2266845703125) }
boneObj['right-arm'] = { bone: bones.getObjectByName('mixamorigRightArm'), initPos: new THREE.Vector3(-0.40517494082450867, -0.43440765142440796, -0.2242431640625) }
boneObj['right-fore-arm'] = { bone: bones.getObjectByName('mixamorigRightForeArm'), initPos: new THREE.Vector3(-0.6103491187095642, -0.4126957058906555, -0.3125) }
boneObj['neck'] = { bone: bones.getObjectByName('mixamorigNeck'), initPos: new THREE.Vector3(1, 0.0, 0.0) }
boneObj['waist'] = { bone: bones.getObjectByName('mixamorigSpine2'), initPos: new THREE.Vector3(1, 0.0, 0.0) }
// 隐藏骨骼
// skeleton = new THREE.SkeletonHelper(model);
// skeleton.visible = false;
// scene.add(skeleton);
});
对关键点的骨骼进行初始化位置,用于计算初始方向,然后与XBot角色模型的骨骼绑定起来,方便后续进行操作
4、肩部旋转
原理:
在BlazePose中,肩膀就是 11,12 两个关键点,在T-pose中,11,12 的初始方向 是 vector3(1,0,0),现在我们只要知道 11,12 点的方向,就能求出旋转,再设置腰部的旋转就可以。这里没有考虑肩部下沉等状态。
因为肩部本身是无法旋转的,他们是依靠腰部的关节旋转,因此该旋转需要应用在模型腰部的骨骼上。

肩部旋转示意图
对两个向量的旋转用四元数(Quaternion)计算与表示,使用向量叉积求出旋转轴,使用向量angle计算角度
const angle = newVec.angleTo(baseVec);
const cross = new THREE.Vector3().crossVectors(newVec, baseVec);
const quaternion = new THREE.Quaternion();
quaternion.setFromAxisAngle(cross, angle);// shoulder 旋转
const leftShoulderM = currentPoses.keypoints3D[11];
const rightShoulderM = currentPoses.keypoints3D[12];
const centorShoulderM = new THREE.Vector3().addVectors(leftShoulderM, rightShoulderM).divideScalar(2);
const shoulderOriginDir = new THREE.Vector3(1, 0, 0);
const shoulderCurrentDir = new THREE.Vector3().subVectors(leftShoulderM, rightShoulderM).normalize();
const shoulderAngle = shoulderCurrentDir.angleTo(shoulderOriginDir);
const shoulderCross = new THREE.Vector3().crossVectors(shoulderCurrentDir, shoulderOriginDir).normalize();
const shoulderQuaternion = new THREE.Quaternion();
shoulderQuaternion.setFromAxisAngle(shoulderCross, shoulderAngle * 2);
boneObj['waist']['bone'].setRotationFromQuaternion(shoulderQuaternion);
5、大臂/小臂 旋转
由于单段骨骼长度固定,因此只能通过旋转,与肩部旋转类似,计算大臂的旋转可以通过 肩部关键点(11) -> 肘关键点(13)进行计算,小臂的旋转可以通过 肘部关键点(13) -> 腕部关键点(15)进行计算。
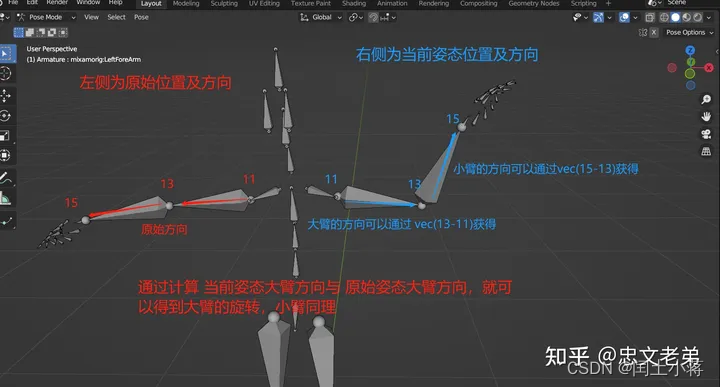
大臂带动小臂旋转逻辑
/**
* 通过上下两个骨骼端点位置,计算出骨骼的旋转角度
*/
function getBoneRotation(baseBoneName, baseBonePoints, currentBoneName, currentBonePoints) {
const baseBone = boneObj[baseBoneName];
const currentBone = boneObj[currentBoneName];
const baseBonePos = new THREE.Vector3(baseBonePoints[0], baseBonePoints[1], baseBonePoints[2])
const currentBonePos = new THREE.Vector3(currentBonePoints[0], currentBonePoints[1], currentBonePoints[2])
const newVec = new THREE.Vector3().subVectors(currentBonePos, baseBonePos);
const baseVec = new THREE.Vector3().subVectors(currentBone.initPos, baseBone.initPos);
newVec.normalize();
baseVec.normalize();
const angle = newVec.angleTo(baseVec);
const cross = new THREE.Vector3().crossVectors(newVec, baseVec);
const quaternion = new THREE.Quaternion();
quaternion.setFromAxisAngle(cross, angle);
return quaternion;
}
const left_nodes = currentPoses.keypoints3D.filter((item, index) => {
return index === 11 || index === 13 || index === 15
})
const right_nodes = currentPoses.keypoints3D.filter((item, index) => {
return index === 12 || index === 14 || index === 16
})
const boneRotation1 = getBoneRotation('left-shoulder', [left_nodes[0].x, left_nodes[0].y, left_nodes[0].z], 'left-arm', [left_nodes[1].x, left_nodes[1].y, left_nodes[1].z])
boneObj['left-arm']['bone'].setRotationFromQuaternion(boneRotation1)
const boneRotation2 = getBoneRotation('left-arm', [left_nodes[1].x, left_nodes[1].y, left_nodes[1].z], 'left-fore-arm', [left_nodes[2].x, left_nodes[2].y, left_nodes[2].z])
boneObj['left-fore-arm']['bone'].setRotationFromQuaternion(boneRotation2)
const boneRotation3 = getBoneRotation('right-shoulder', [right_nodes[0].x, right_nodes[0].y, right_nodes[0].z], 'right-arm', [right_nodes[1].x, right_nodes[1].y, right_nodes[1].z])
boneObj['right-arm']['bone'].setRotationFromQuaternion(boneRotation3)
const boneRotation4 = getBoneRotation('right-arm', [right_nodes[1].x, right_nodes[1].y, right_nodes[1].z], 'right-fore-arm', [right_nodes[2].x, right_nodes[2].y, right_nodes[2].z])
boneObj['right-fore-arm']['bone'].setRotationFromQuaternion(boneRotation4)
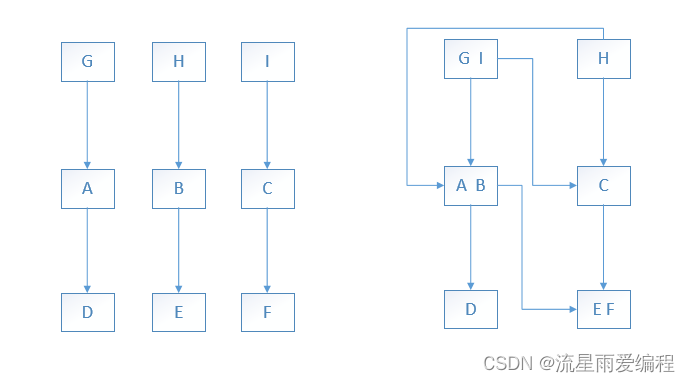
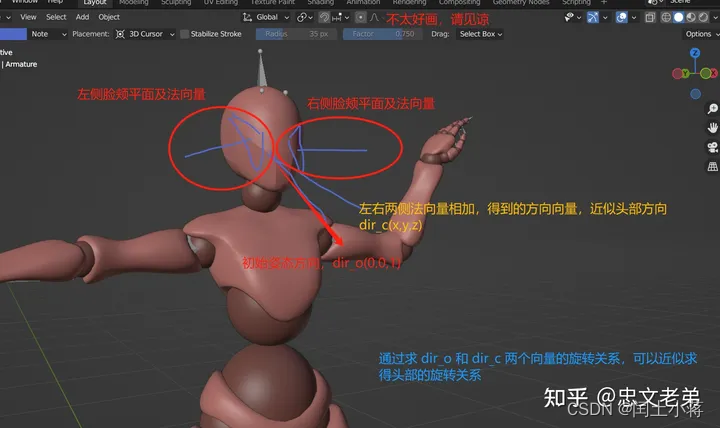
6、通过脖子关节带动头部整体的旋转
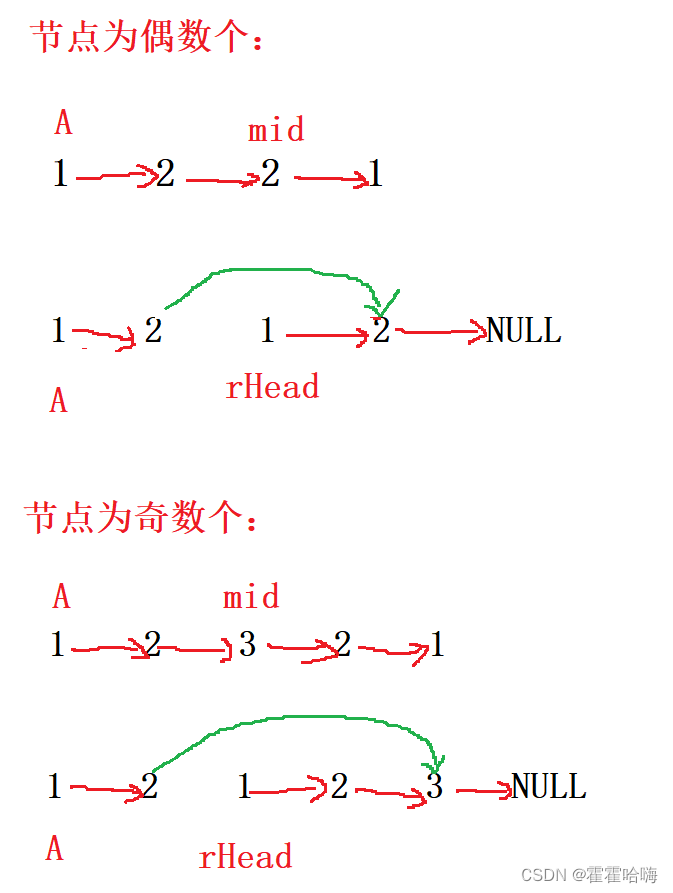
头部运动相对负责,前面已经提到过,为了解决初始坐标系及当前姿态坐标系问题,做了一些工作。简化下来说,就是对 左脸颊(10,8,6)三个关键点建立三角面 leftTriangle,同时求得 该面的法向量,对右边脸颊做同样操作,最后对两个法向量求和,得到用来近似表达头部的方向向量。原理如图
// neck 旋转
const noseM = currentPoses.keypoints3D[0];
const leftM3 = currentPoses.keypoints3D[9];
const leftM = currentPoses.keypoints3D[2];
const leftM2 = currentPoses.keypoints3D[7];
const rightM3 = currentPoses.keypoints3D[10];
const rightM = currentPoses.keypoints3D[5];
const rightM2 = currentPoses.keypoints3D[8];
const leftTriangle = new THREE.Triangle(
new THREE.Vector3(leftM3.x, leftM3.y, leftM3.z).multiplyScalar(100),
new THREE.Vector3(leftM2.x, leftM2.y, leftM2.z).multiplyScalar(100),
new THREE.Vector3(leftM.x, leftM.y, leftM.z).multiplyScalar(100)
);
const rightTriangle = new THREE.Triangle(
new THREE.Vector3(rightM2.x, rightM2.y, rightM2.z).multiplyScalar(100),
new THREE.Vector3(rightM3.x, rightM3.y, rightM3.z).multiplyScalar(100),
new THREE.Vector3(rightM.x, rightM.y, rightM.z).multiplyScalar(100)
);
const leftNormal = leftTriangle.getNormal(new THREE.Vector3());
const rightNormal = rightTriangle.getNormal(new THREE.Vector3());
const mixNormal = new THREE.Vector3().addVectors(leftNormal, rightNormal);
mixNormal.normalize();
const scaleRate = 2;
const faceMaterial = new THREE.LineBasicMaterial({
color: 0xffffff
});
const noseVector = new THREE.Vector3(noseM.x, noseM.y, noseM.z);
// leftFace
const leftFacePoints = [];
leftFacePoints.push(new THREE.Vector3().subVectors(new THREE.Vector3(leftM.x, leftM.y, leftM.z), noseVector).multiplyScalar(scaleRate));
leftFacePoints.push(new THREE.Vector3().subVectors(new THREE.Vector3(leftM3.x, leftM3.y, leftM3.z), noseVector).multiplyScalar(scaleRate));
leftFacePoints.push(new THREE.Vector3().subVectors(new THREE.Vector3(leftM2.x, leftM2.y, leftM2.z), noseVector).multiplyScalar(scaleRate));
const leftFaceGeometry = new THREE.BufferGeometry().setFromPoints(leftFacePoints);
const leftFaceMesh = new THREE.LineLoop(leftFaceGeometry, faceMaterial);
helperGroup.add(leftFaceMesh);
// rightFace
const rightFacePoints = [];
rightFacePoints.push(new THREE.Vector3().subVectors(new THREE.Vector3(rightM.x, rightM.y, rightM.z), noseVector).multiplyScalar(scaleRate));
rightFacePoints.push(new THREE.Vector3().subVectors(new THREE.Vector3(rightM3.x, rightM3.y, rightM3.z), noseVector).multiplyScalar(scaleRate));
rightFacePoints.push(new THREE.Vector3().subVectors(new THREE.Vector3(rightM2.x, rightM2.y, rightM2.z), noseVector).multiplyScalar(scaleRate));
const rightFaceGeometry = new THREE.BufferGeometry().setFromPoints(rightFacePoints);
const rightFaceMesh = new THREE.LineLoop(rightFaceGeometry, faceMaterial);
helperGroup.add(rightFaceMesh);
// neckOrigin
const neckOriginDir = new THREE.Vector3(0, 0, -1);
const neckOriginPoints = []
neckOriginPoints.push(new THREE.Vector3());
neckOriginPoints.push(neckOriginDir);
const neckOriginGeometry = new THREE.BufferGeometry().setFromPoints(neckOriginPoints);
const neckOriginMesh = new THREE.Line(neckOriginGeometry, new THREE.LineBasicMaterial({
color: 0xff0000
}));
helperGroup.add(neckOriginMesh);
// neckCurrent
const neckCurrentDir = new THREE.Vector3(0, 0, -1);
const neckCurrentPoints = []
neckCurrentPoints.push(new THREE.Vector3());
neckCurrentPoints.push(mixNormal);
const neckCurrentGeometry = new THREE.BufferGeometry().setFromPoints(neckCurrentPoints);
const neckCurrentMesh = new THREE.Line(neckCurrentGeometry, faceMaterial);
helperGroup.add(neckCurrentMesh);
const oNormal = new THREE.Vector3(0, 0, -1);
const neckAngle = oNormal.angleTo(mixNormal);
const neckCross = new THREE.Vector3().crossVectors(oNormal, mixNormal).normalize();
const neckQuaternion = new THREE.Quaternion();
neckQuaternion.setFromAxisAngle(neckCross, neckAngle * 2);
boneObj['neck']['bone'].setRotationFromQuaternion(neckQuaternion)
再次感谢大佬 【忠文老弟-知乎】
来源于:纯手撸(js+网络摄像头)实现的丐版动捕
总结
汤得自己喝,药不能停,不断学习新知识,下面准备自己搭建搞一个。等后面会发出来仅供学习。
图像识别各大云平台均有对应的产品,我看了阿里云的。
web3d 开发越来越光明