代码入口
frameworks/av/camera/cameraserver
里面包含了四个文件
我们先来看看Android.bp的内容
package {
// See: http://go/android-license-faq
// A large-scale-change added 'default_applicable_licenses' to import
// all of the 'license_kinds' from "frameworks_av_camera_license"
// to get the below license kinds:
// SPDX-license-identifier-Apache-2.0
default_applicable_licenses: ["frameworks_av_camera_license"],
}
cc_binary {
name: "cameraserver",
srcs: ["main_cameraserver.cpp"],
header_libs: [
"libmedia_headers",
],
shared_libs: [
"libcameraservice",
"liblog",
"libutils",
"libui",
"libgui",
"libbinder",
"libhidlbase",
"android.hardware.camera.common@1.0",
"android.hardware.camera.provider@2.4",
"android.hardware.camera.provider@2.5",
"android.hardware.camera.provider@2.6",
"android.hardware.camera.provider@2.7",
"android.hardware.camera.provider-V1-ndk",
"android.hardware.camera.device@1.0",
"android.hardware.camera.device@3.2",
"android.hardware.camera.device@3.4",
],
compile_multilib: "first",
cflags: [
"-Wall",
"-Wextra",
"-Werror",
"-Wno-unused-parameter",
],
init_rc: ["cameraserver.rc"],
vintf_fragments: [
"manifest_android.frameworks.cameraservice.service@2.2.xml",
],
}我们注意到
init_rc: ["cameraserver.rc"],
由此可知系统在编译时会将cameraserver.rc放到system/etc/init目录下,
init进程启动的时候会解析这个目录下的所有.rc文件。
solid/android13/amdroid13_ntls/out/target/product/hpg2_24/system/etc/init$ ll cameraserver.rc
-rw-rw-r-- 1 wancg wancg 214 3月 7 14:59 cameraserver.rc
接下来我们来探探cameraserver.rc的庐山真面目:
service cameraserver /system/bin/cameraserver
class main
user cameraserver
group audio camera input drmrpc
ioprio rt 4
task_profiles CameraServiceCapacity MaxPerformance
rlimit rtprio 10 10开机时/system/bin/cameraserver启动一个名称为cameraserver的服务
再来看看main_cameraserver.cpp 的内容
#define LOG_TAG "cameraserver"
//#define LOG_NDEBUG 0
#include "CameraService.h"
#include <hidl/HidlTransportSupport.h>
using namespace android;
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
// Set 5 threads for HIDL calls. Now cameraserver will serve HIDL calls in
// addition to consuming them from the Camera HAL as well.
hardware::configureRpcThreadpool(5, /*willjoin*/ false);
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
CameraService::instantiate();
//下面我们就从CameraService继续分析。
ALOGI("ServiceManager: %p done instantiate", sm.get());
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}CarmeraServer.cpp
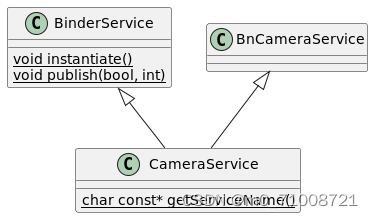
CameraService继承了BinderService.h.这个:instantiate()调用到了BinderService.h里的代码
frameworks/native/libs/binder/include/binder/BinderService.h
class BinderService
{
public:
static status_t publish(bool allowIsolated = false,
int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {
sp<IServiceManager> sm(defaultServiceManager());
return sm->addService(String16(SERVICE::getServiceName()), new SERVICE(), allowIsolated,
dumpFlags);
}
static void publishAndJoinThreadPool(
bool allowIsolated = false,
int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {
publish(allowIsolated, dumpFlags);
joinThreadPool();
}
static void instantiate() { publish(); }
static status_t shutdown() { return NO_ERROR; }
private:
static void joinThreadPool() {
sp<ProcessState> ps(ProcessState::self());
ps->startThreadPool();
ps->giveThreadPoolName();
IPCThreadState::self()->joinThreadPool();
}
};
在回过头来看看上面提到的CameraService方法
// frameworks/av/services/camera/libcameraservice/CameraService.h
class CameraService :
// 继承BinderService指定泛型类型为CameraService
public BinderService<CameraService>,
public virtual ::android::hardware::BnCameraService,
public virtual IBinder::DeathRecipient,
public virtual CameraProviderManager::StatusListener
{
...
public:
...
// 注册的binder服务名称为“media.camera”
static char const* getServiceName() {
return "media.camera";
}
...
}
接下来我们看下frameworks/native/libs/binder/include/binder/BinderService.h 中提到addService方法
// frameworks/native/libs/binder/include/binder/IServiceManager.h
// 第一个参数是字符串media.camera
// 第二个参数是new的CameraService对象
// 这里相当于const sp<IBinder>& service = new CameraService()
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated = false,
int dumpsysFlags = DUMP_FLAG_PRIORITY_DEFAULT) = 0;
我们看下class sp的实现
// system/core/libutils/include/utils/StrongPointer.h
// 下面的T就是CameraService*
template <typename T>
sp<T>& sp<T>::operator=(T* other) {
T* oldPtr(*const_cast<T* volatile*>(&m_ptr));
if (other) {
check_not_on_stack(other);
// 可以看到如果指针不为空的话
// 会调用自身的incStrong方法
other->incStrong(this);
}
if (oldPtr) oldPtr->decStrong(this);
if (oldPtr != *const_cast<T* volatile*>(&m_ptr)) sp_report_race();
m_ptr = other;
return *this;
}
但是我们发现CameraService里并没有incStrong方法,那么一定
是它的父类的方法,由此引出了一个非常重要的类RefBase。
RefBase是Android中所有C++对象的基类。
从这个文件可以看出,instantiate最终还是调用到了IServiceManager里的addService, 将我们的cameraService注册到了系统的服务管理器里去了.
这里调用到CameraService后, 因为是开机第一次调用,它的引用计数为1,所以会调用到CameraService::onFirstRef()这个函数. 这个函数是从CameraService的父类RefBase里继承过来的.该函数在强引用sp新增引用计数时调用,什么意思?就是当 有sp包装的类初始化的时候调用.我们再看看cameraService::onFirstRef()
frameworks\av\services\camera\libcameraservice\CameraService.cpp
void CameraService::onFirstRef()
{
ALOGI("CameraService process starting");
BnCameraService::onFirstRef();
// Update battery life tracking if service is restarting
BatteryNotifier& notifier(BatteryNotifier::getInstance());
notifier.noteResetCamera();
notifier.noteResetFlashlight();
status_t res = INVALID_OPERATION;
res = enumerateProviders();
if (res == OK) {
mInitialized = true;
}
mUidPolicy = new UidPolicy(this);
mUidPolicy->registerSelf();
mSensorPrivacyPolicy = new SensorPrivacyPolicy(this);
mSensorPrivacyPolicy->registerSelf();
mInjectionStatusListener = new InjectionStatusListener(this);
mAppOps.setCameraAudioRestriction(mAudioRestriction);
sp<HidlCameraService> hcs = HidlCameraService::getInstance(this);
if (hcs->registerAsService() != android::OK) {
ALOGE("%s: Failed to register default android.frameworks.cameraservice.service@1.0",
__FUNCTION__);
}
// This needs to be last call in this function, so that it's as close to
// ServiceManager::addService() as possible.
CameraServiceProxyWrapper::pingCameraServiceProxy();
ALOGI("CameraService pinged cameraservice proxy");
}
在这个函数里,我们只关注enumerateProviders(),这里就到了列出所有cameraProvider.
status_t CameraService::enumerateProviders() {
status_t res;
std::vector<std::string> deviceIds;
std::unordered_map<std::string, std::set<std::string>> unavailPhysicalIds;
{
Mutex::Autolock l(mServiceLock);
if (nullptr == mCameraProviderManager.get()) {
mCameraProviderManager = new CameraProviderManager();
res = mCameraProviderManager->initialize(this);
if (res != OK) {
ALOGE("%s: Unable to initialize camera provider manager: %s (%d)",
__FUNCTION__, strerror(-res), res);
logServiceError(String8::format("Unable to initialize camera provider manager"),
ERROR_DISCONNECTED);
return res;
}
}
// Setup vendor tags before we call get_camera_info the first time
// because HAL might need to setup static vendor keys in get_camera_info
// TODO: maybe put this into CameraProviderManager::initialize()?
mCameraProviderManager->setUpVendorTags();
if (nullptr == mFlashlight.get()) {
mFlashlight = new CameraFlashlight(mCameraProviderManager, this);
}
res = mFlashlight->findFlashUnits();
if (res != OK) {
ALOGE("Failed to enumerate flash units: %s (%d)", strerror(-res), res);
}
deviceIds = mCameraProviderManager->getCameraDeviceIds(&unavailPhysicalIds);
}
for (auto& cameraId : deviceIds) {
String8 id8 = String8(cameraId.c_str());
if (getCameraState(id8) == nullptr) {
onDeviceStatusChanged(id8, CameraDeviceStatus::PRESENT);
}
if (unavailPhysicalIds.count(cameraId) > 0) {
for (const auto& physicalId : unavailPhysicalIds[cameraId]) {
String8 physicalId8 = String8(physicalId.c_str());
onDeviceStatusChanged(id8, physicalId8, CameraDeviceStatus::NOT_PRESENT);
}
}
}
// Derive primary rear/front cameras, and filter their charactierstics.
// This needs to be done after all cameras are enumerated and camera ids are sorted.
if (SessionConfigurationUtils::IS_PERF_CLASS) {
// Assume internal cameras are advertised from the same
// provider. If multiple providers are registered at different time,
// and each provider contains multiple internal color cameras, the current
// logic may filter the characteristics of more than one front/rear color
// cameras.
Mutex::Autolock l(mServiceLock);
filterSPerfClassCharacteristicsLocked();
}
return OK;
}这个函数里,创建了一个CameraProviderManager对象,并调进行了初始化.具体如下: