在全球工业自动化和智能化加速发展的今天,机器人行业正经历着翻天覆地的变化。具身智能研究,作为人工智能领域的关键分支,正努力在精准动作控制、高层次自主决策能力以及自然人机交互体验上赋予机器人新的能力。
在此背景下,大象机器人myArm M&C系列应运而生,目的是为研究者和开发者提供一种强大且超高性价比的数据采集与执行的轻量化工具,以推进具身智能技术的革新及其应用!

myArm M&C一经上市,已交付海内外数十台订单,收获开发者一致认可。这一系列的智能化6自由度遥操作机械臂,不仅达到了市场对高性能机器人的苛刻要求,更通过其前沿的遥操作技术,为研究和开发人员打开了新的可能性之门。
myArm M&C系列在设计时充分考虑到了用户对灵活性和适应性的需求,确保它能在多样化的研究和应用场景中扮演关键角色。
大象机器人发布智能遥操作机械臂组合myArm M&C
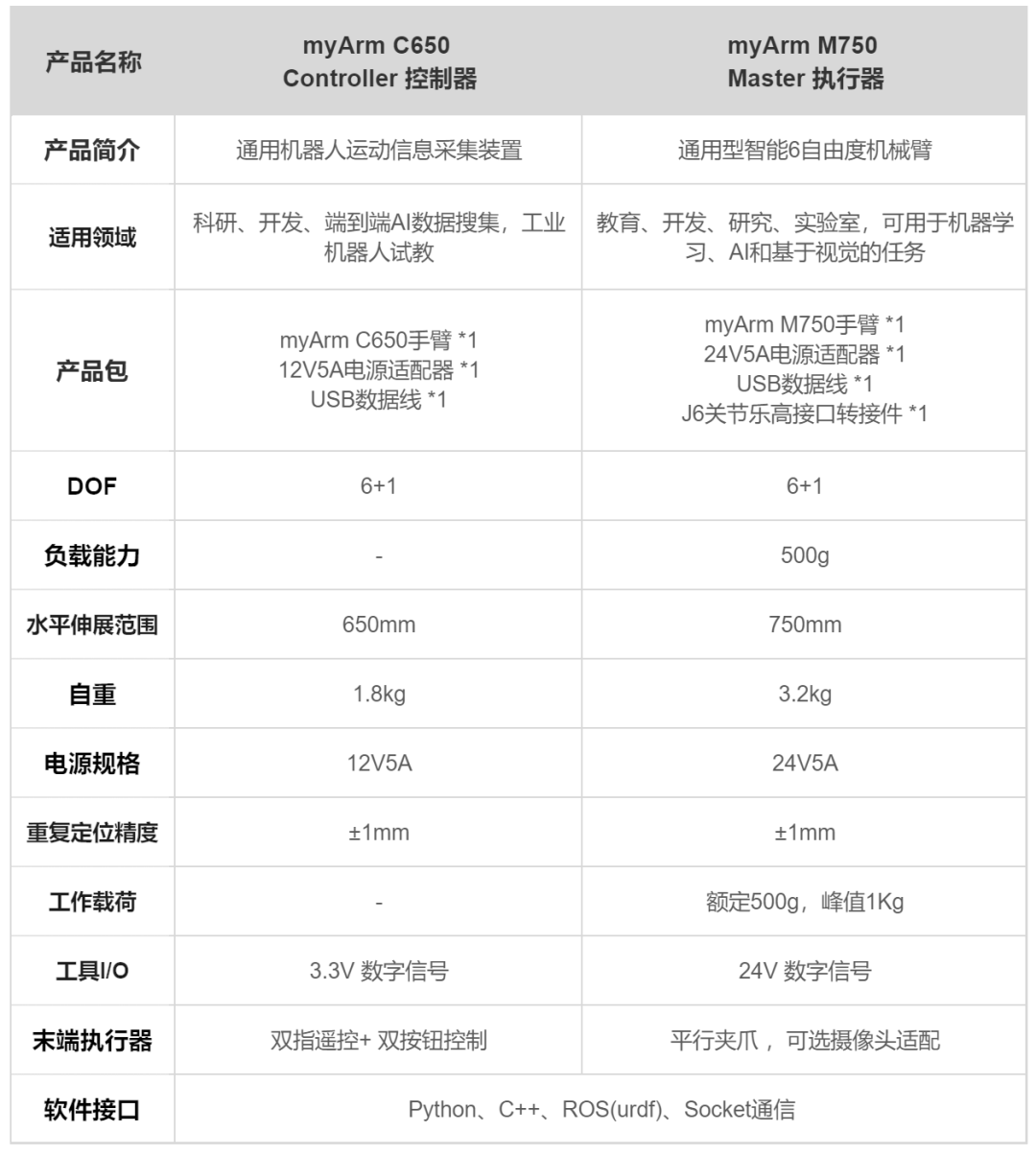
myArm C650
机器人专用控制器(Controller)
myArm C650,作为通用型6自由度机器人运动信息采集装置,旨在满足教育、研究和工业领域对机器人动作数据采集和分析的需求。

C650通过轻量化设计,在保持650mm的水平伸展范围和1300mm的总跨度的同时,机身仅重1.8kg。这种设计大幅减轻了机器人运动时的惯性力,从而提升了机械臂的响应速度和精度。
C650采用高精度数字伺服电机,所有关节均配备了4096位编码器。它的6自由度设计能轻松模拟人手臂的运动,执行多样化任务。双指遥控+双自定义按钮控制的操作方式,支持记录功能,允许用户通过简单的手势和按钮指令来精确控制机械臂的动作,从而实现对机器人行为的直接和即时反馈。

这种高度的灵活性和适应性,让C650能在各种实验和教学场景中提供精确的运动追踪和数据采集。

myArm C650凭借其卓越的性能和达到50Hz的信息采集速率,在高等院校和科研机构的机器人算法开发与教学领域中占据了显著的位置。
这款机械臂能够实时捕捉并传输关节角度、速度等关键状态信息,为实现复杂机器人控制系统的精细化管理提供了可靠的数据支撑。
特别在远程控制的应用场景中,无论面对标准配置还是复杂多变的机器人结构,myArm C650均展现了其卓越的表现力,完全满足了研究人员和教育者对于高精度及快速响应的严苛要求。

myArm C650与Python和ROS的兼容性,加上提供开源的遥控示范文件,极大地扩宽了其应用领域,使用户能够直接操控包括myArm M750、myCobot Pro 630以及Mercury B1等在内的众多尖端机器人系统。
这一特性不仅增强了myArm C650的多功能性,也为用户操作更广泛的高级机器人平台提供了便利。

myArm M750
机器人执行器(Master)
myArm M750,通用型智能化6自由度机器人运动控制验证装置,代表了机器人技术在精确度和灵活性方面的最新进展。
它不仅满足了对高精度机器人运动控制的需求,而且特别适合于入门级机器人运动算法的验证和实践教学场景。其标准化机械臂结构为学生和初学者提供了理想的学习平台,以掌握机器人运动学的基本原理和应用。

myArm M750致力于实现精确的运动控制与验证,尤其针对那些对操作精度有严格要求的应用场景,如精密装配、细微操纵以及质量监测等,表现出色。
它的额定负载能力为500g,峰值负载可达1kg,搭载了工业级高精度数字伺服电机和领先的控制算法,赋予myArm M750非凡的扭矩控制和精确的位置定位能力,成为实现高度精准机器人运动控制的核心要素。

myArm M750的多功能性,在其末端执行器的设计上显得尤为突出。标配标准的平行夹爪和视觉模块——为用户提供了基本的抓取与识别能力

除此之外,myArm M750还兼容一系列可选配件,这些配件极大地拓宽了该机械臂的应用领域和灵活性。
myArm M&C
机器人遥操作实时控制套件
myArm M&C机器人遥操作实时控制套件,通过融合尖端遥操作技术,提供了旨在实现远程控制和实时交互的先进机器人解决方案。
它巧妙结合了myArm C650的灵活性和myArm M750的高精度控制能力,形成了一个多功能且高度灵活的操作平台,适用于研究、教育和商业应用的广泛领域。
专为模拟人类行为而设计,能够验证和测试类似ALOHA机器人的遥操作系统和机器人运动规划模型。

借助myArm M&C套件,凭借其毫秒级的数据采集与控制能力、实时拖动控制功能以及多套机器的协同操作能力,研究人员和开发者能够完成一系列复杂任务,例如对人类行为的高级模拟。


这些高级任务的执行,不仅展示了机器人在模仿人类动作时的精确性和高效率,也大力推进了机器人技术在仿真人类行为及完成日常工作任务方面的研究与进步。

myArm M&C还可以和四足仿生机器人结合组成四足机器人复合套件,这一组合利用遥操作机械臂的精确控制能力与四足机器狗的高度灵活性,向用户开辟了一个创新性的机器人应用平台。
研究人员可以借此套装深入探讨机器人动力学的复杂性,测试创新的运动控制算法,并优化机器人在各种地形条件下的稳定性与运行效率。
此外,集成的AI技术赋予了机器人学习与适应不同任务的能力,包括自主导航、物体识别以及进行复杂决策的能力,使其在多个研究领域展现出广阔的应用潜力。

myArm M&C 具身人形复合套件
低成本Mobile ALOHA解决方案
斯坦福大学领头的Mobile ALOHA项目,已迅速攀升为全球科技领域内的热议焦点。这个先进的系统使用户得以通过人类的示范来完成复杂的双手操作任务,并通过数据的积累和协同训练进一步增强模仿学习算法的效能。
Mobile ALOHA展现了其在执行诸多真实世界任务上的能力,包括但不限于清理桌面上洒落的酒水、烹饪虾肉、以及清洗平底锅等,它不仅是机器人技术领域的一个重要突破,同时也开辟了我们与机器人和谐共处未来的无限可能性。
myArm M&C具身人形复合套件,采用斯坦福Mobile ALOHA同款松灵Tracer移动底盘。

凭借其开源理念、极简设计、模块化构建和本地社区支持等优势,myArm M&C机器人遥操作实时控制套件成为了一种低成本的Mobile ALOHA解决方案。
这一套件以更为亲民的价格和更便捷的使用方式进入市场,为中小型企业以及教育和研究机构提供了一个理想的选择,使他们能够轻松地接入并利用最前沿的机器人技术。

myArm M&C系列产品为用户提供灵活的配置选择。涵盖了从基础研究到复杂任务执行的广泛需求。具身人形复合套件和四足机器人复合套件,也进一步扩展了机器人技术的应用范围,为跨学科研究和创新提供了强大的支持。
随着myArm M&C系列的成功面市,我们不仅目睹了机器人技术在操作性和灵活性方面的重大进展,同时也对具身智能研究领域的未来潜能抱有无限期待。
myArm M&C系列机械臂已经成为研究人员和开发者的强大伙伴,同时也为更广泛的用户群体敞开了探索和利用机器人技术的新路径。
展望未来,myArm M&C将持续走在行业创新的前沿,不懈突破技术的边界,驱动机器人技术在更广泛的应用领域中的发展,以便更加有效地服务于社会和人类的需求。
无论在精密制造、医疗辅助、教育培训,还是家庭服务等领域,myArm M&C系列都将凭借其卓越的性能和可靠性,成为值得信赖的机器人助理。
大象机器人热切邀请全球的合作伙伴和用户加入这一振奋人心的旅程。让我们共同努力,见证机器人技术如何重塑我们的世界,使我们的生活变得更加智能、高效和便捷。