【现代控制】倒立摆模型
news2026/2/19 15:04:44




本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1563966.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

nslookup查询网站是否支持IPV6
nslookup是一种网络管理命令行工具,可用于查询DNS域名和IP地址输入指令nslookup默认服务器和Address是当前上网所用的DNS服务器域名和地址A记录A(Address)记录指的是用来指定主机名或域名对应的IP记录。

OpenHarmony实战:轻量级系统之子系统移植概述
OpenHarmony系统功能按照“系统 > 子系统 > 部件”逐级展开,支持根据实际需求裁剪某些非必要的部件,本文以部分子系统、部件为例进行介绍。若想使用OpenHarmony系统的能力,需要对相应子系统进行适配。
OpenHarmony芯片适配常见子系统列…

2024春招冲刺题单 ONT68 最接近的三数之和【中等 数组,递归 Java,Go,PHP】
题目 题目链接: https://www.nowcoder.com/practice/f889497fd1134af5af9de60b4d13af23 相同题目: https://www.lintcode.com/problem/59
思路 本题答案是n数之和相关问题的模板。参考答案Java
import java.util.*;public class Solution {/*** 代码中的类名、方法…
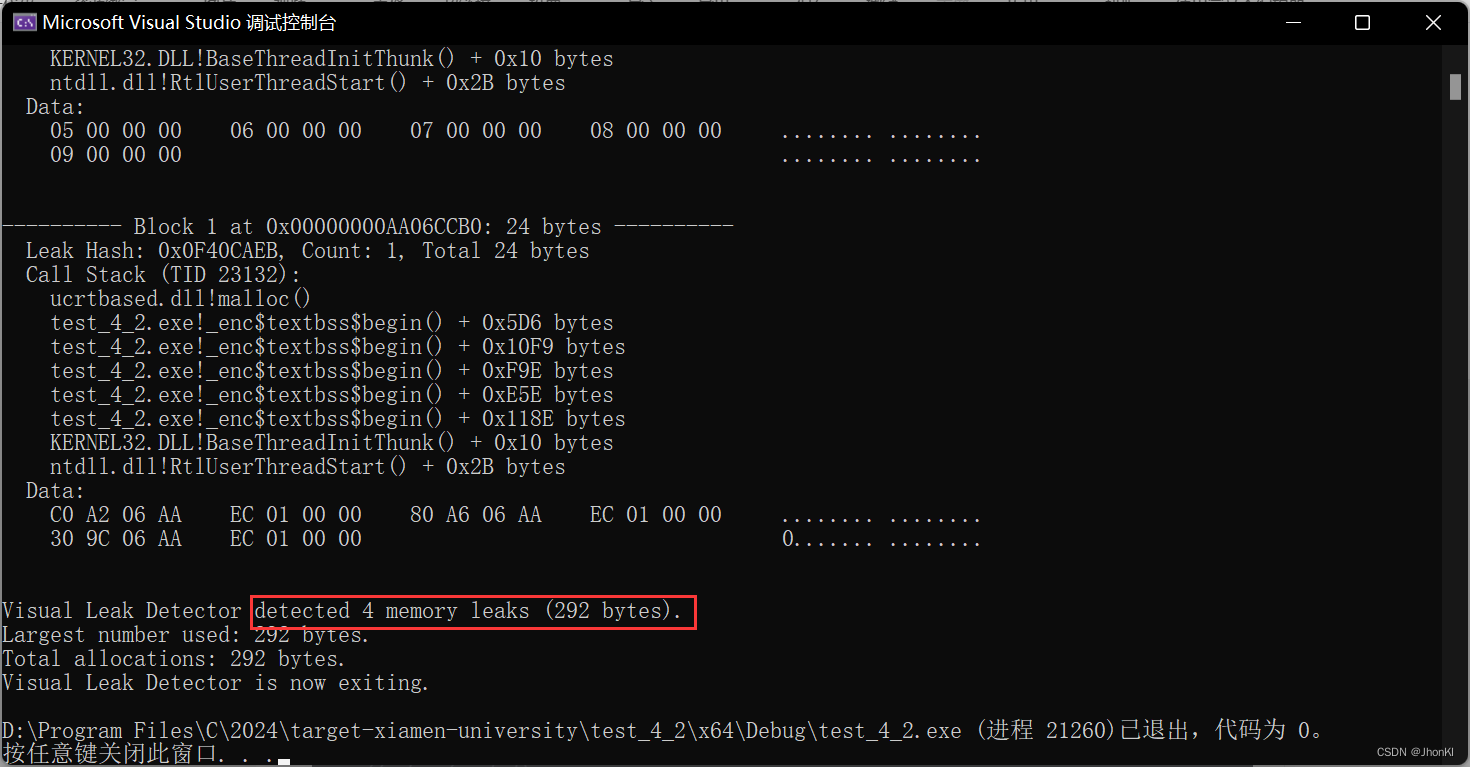
【C语言】“vid”Microsoft Visual Studio安装及应用(检验内存泄露)
文章目录 前言安装包获取配置VLD完成 前言
我们在写代码时往往容易存在内存泄漏的情况,所以存在这样一个名为VLD的工具用来检验内存泄漏,现在我来教大家安装一下
安装包获取
vld下载网址:https://github.com/KindDragon/vld/releases/tag/…
【GPT5进展】GPT-5将于今年年中发布
OpenAI即将发布的GPT-5代表了人工智能技术的一个重大进步,这一新一代模型预计将进一步扩大OpenAI在AI应用领域的影响力。以下是关于GPT-5的几个关键点,旨在清晰、简洁地向读者传达这一重要更新:
1. 性能和功能的实质性提升
GPT-5在性能上做…

读取信息boot.bin和xclbin命令
bootgen读Boot.bin命令 johnjohn-virtual-machine:~/project_zynq/kv260_image_ubuntu22.04$ bootgen -read BOOT-k26-starter-kit-202305_2022.2.bin xclbinutil读xclbin命令 johnjohn-virtual-machine:~/project_zynq/kv260_image_ubuntu22.04$ xclbinutil -i kv260-smartca…

2024 年每个程序员都应该尝试的 8 个AI工具
随着人工智能技术的极速发展,新的 AI 工具正以前所未有的速度涌现,为开发者们带来了前所未有的机会和挑战。在这个不断演进的时代,掌握最新的 AI 技术已成为每个程序员的必修课。
在本文中,我们收集了8 个程序员在 2024 年值得尝…
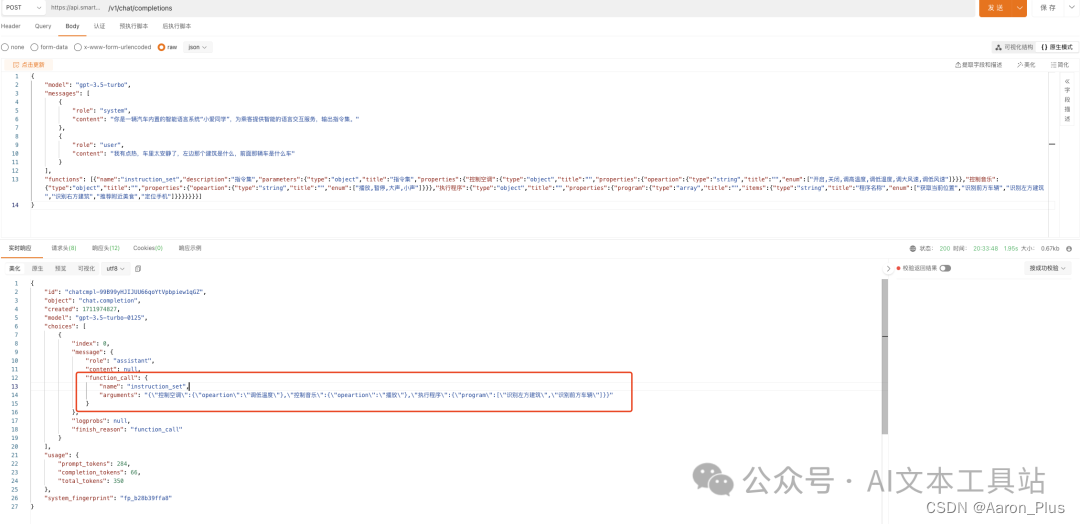
函数调用实现小米汽车智能语音助手
上周小米汽车发布,其中有一个特色功能就是智能语音,小爱同学整合了语音大模型,实现智能座舱体验。
雷老板的PPT也演示了,一些口语化的对话就能触发各种指令,无论是开空调、播放音乐,还是找手机、识别前方汽…
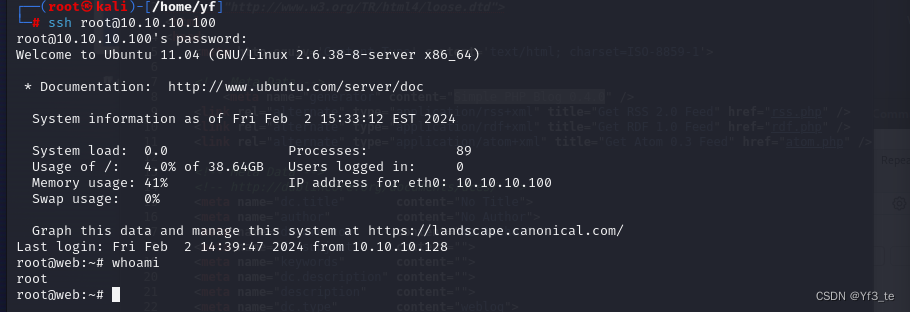
vulnhub pWnOS v2.0通关
知识点总结:
1.通过模块来寻找漏洞
2.msf查找漏洞
3.通过网站源代码,查看模块信息
环境准备
攻击机:kali2023
靶机:pWnOS v2.0
安装地址:pWnOS: 2.0 (Pre-Release) ~ VulnHub
在安装网址中看到,该靶…
axios 封装 http 请求详解
前言
Axios 是一个基于 Promise 的 HTTP 库,它的概念及使用方法本文不过多赘述,请参考:axios传送门 本文重点讲述下在项目中是如何利用 axios 封装 http 请求。 一、预设全局变量
在 /const/preset.js 中配置预先设置一些全局变量
window.…

【Qt 学习笔记】Qt 背景介绍
博客主页:Duck Bro 博客主页系列专栏:Qt 专栏关注博主,后期持续更新系列文章如果有错误感谢请大家批评指出,及时修改感谢大家点赞👍收藏⭐评论✍ Qt 背景介绍
文章编号:Qt 学习笔记 / 01 文章目录 Qt 背景…

vue 条件渲染、列表循环渲染、事件绑定 初探第三天
条件渲染
<script>const app Vue.createApp({data(){return {show:true,conditionOne: false,conditionTwo: true,}},template:<div v-if"show"> hello word </div><div v-if"conditionOne"> if </div><div v-else…
![[lesson02]C到C++的升级](https://img-blog.csdnimg.cn/direct/3daa14c355334d42b785eb6ebbfef469.png#pic_center)
[lesson02]C到C++的升级
C到C的升级
C与C的关系
C继承了所有的C特性C在C的基础上提供了更多的语法和特性C的设计目标是运行效率与开发效率的统一
C到C的升级 C更强调语言的实用性 所有的变量都可以在需要使用时再定义 int c 0;
for (int i 1; i < 3; i)
{for(int j 1; j < 3; j){c i * …

Kubernetes(k8s):部署、使用 metrics-server
Kubernetes(k8s):部署、使用 metrics-server 一、metrics-server简介二、部署metrics-server2.1、 下载 Metrics Server 部署文件2.2、修改metrics-server.yaml 文件2.3、 部署 Metrics Server2.4、 检查 Metrics Server 三、使用 Metrics Se…
国资委确定首批起航企业,重点布局人工智能、量子信息等新兴领域
国务院国资委近日按照“四新”(新赛道、新技术、新平台、新机制)标准,遴选确定了首批启航企业,加快新领域新赛道布局、培育发展新质生产力。 据了解,去年以来,国务院国资委围绕加快培育创新型国有企业&…
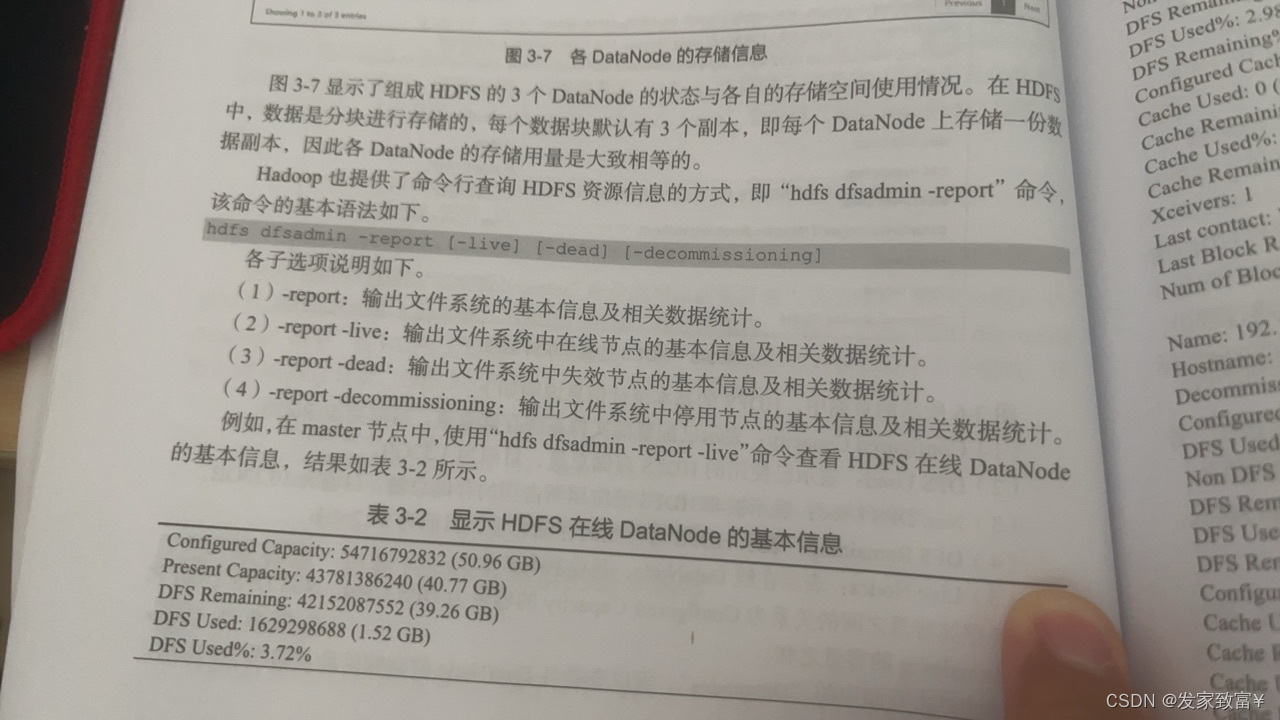
hadoop 查询hdfs资源信息的方式
hdfs dfsadmin -report [-live][-dead][-decommissioning]
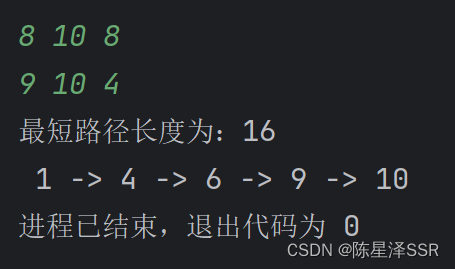
用动态规划求解多段图的最短路径问题
题目描述
对如下图所示的一个5段图,图上的数字代表该段路径的成本。写出求最短路径的计算过程,给出最短路径和距离。
思路分析
创建一个边权数组edgeWeigth,存储顶点和边的信息,用来表示图创建一个cost数组,索引in…

【MySQL系列】使用 ALTER TABLE 语句修改表结构的方法
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…
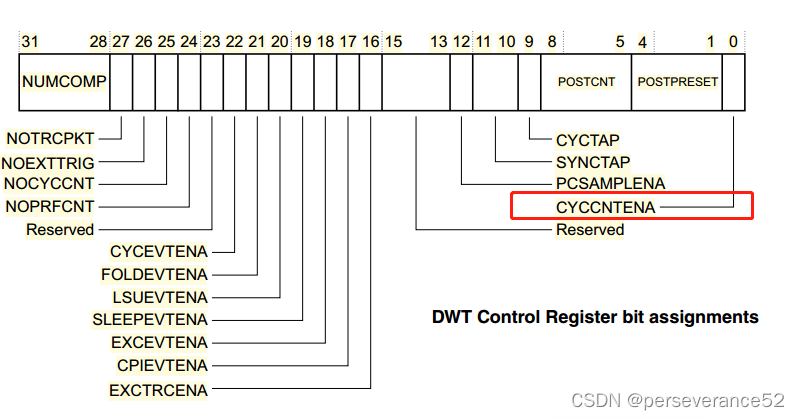
STM32 DWT数据观察触发器作为延时函数的使用
STM32 DWT数据观察触发器作为延时函数的使用 📑DWT(Data Watchpoint and Trace数据观察触发器)描述 📝DWT是属于处理器内核单元中的调试组件之一,由四个比较器组成。它们可配置为:硬件监视点或对ETM或PC采样器或数据地…

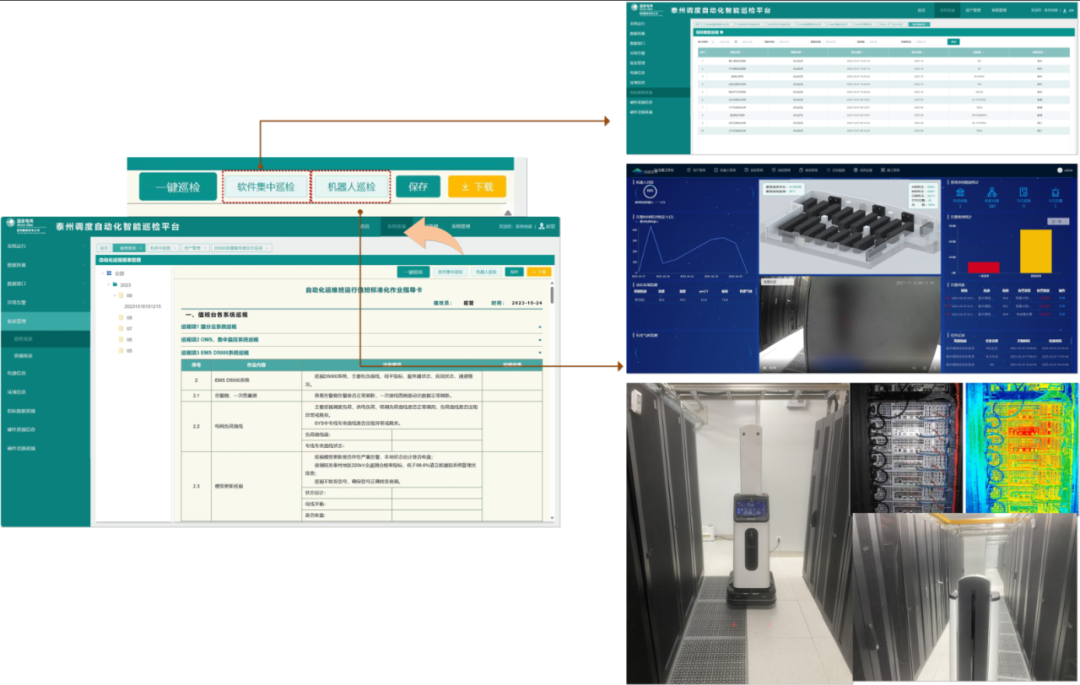
智慧工厂建设全面指南 从规划到实施
随着工业4.0和工业互联网的发展,智慧工厂已成为制造业的热门话题。智慧工厂通过运用先进的信息技术、自动化技术和人工智能技术,实现生产过程的智能化、数字化和网络化,提高生产效率、降低生产成本、提升产品质量,为企业创造更大的…