刚完成的永磁同步电机的助力转向项目,接下来又遇到一个直流无刷电机的项目。刚好有时间将两个电机控制的异同和经典的控制方案总结一下。首先解释一下PMSW和BLDCM的含义。PMSW(Permanent Magnet Synchronous Motor)永磁同步电机的缩写;BLDCM(BrushLess Direct Current Motor)直流无刷电机。其中PMSM经常用于噪音低,控制精度比较高的项目,例如(I-Booster)智能刹车项目,(EPS)电动助力项目;而BLDCM的过载能力强,输出扭矩大,功率密度高。
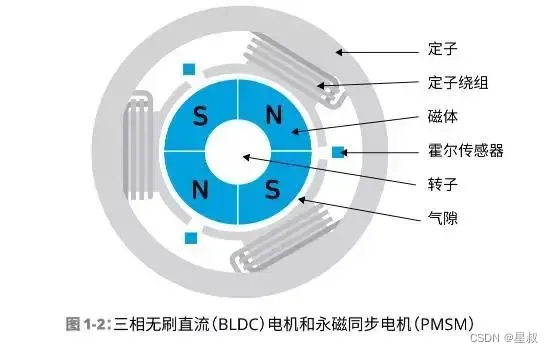
如上图所示是这两种电机的绕线方式。可以看到在关键参数。定子:定子是由线圈通过电流后产生磁场,来产生动力;转子:以及转子,这两种电机的转子都采用的是永磁体。
其中的控制思路也相同,通过外围器件的开关来产生线圈不同方向的电流,从而产生对应的不同的磁场,来控制电机的转动。
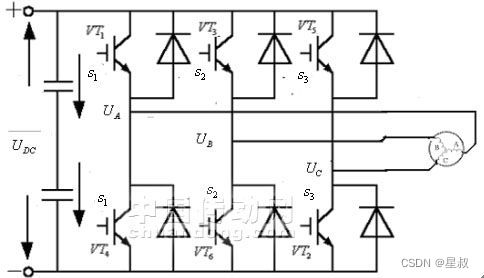
其中两个控制方式的区别主要在于转子产生的磁场能不能持续的作用于永磁铁定子。首先,BLDCM的控制方式比较简单。如图一所示,BLDCM通过两两控制定子电流的方向,来控制磁场的方向,需要注意的事这种控制方式每次只打开两个线圈。即通过6步换向法,即可控制电机旋转,这样慢下看来。电机方法有一步一步转动的迹象,通过电机转起来之后就比较圆顺。这种控制方式只要依托霍尔传感器来确定转子的位置。根据转动精度的要求,可以分为无传感器,两个传感器和三个传感器的控制方法。
而对于控制精度要求比较高的PMSM电机,则需要定子的磁场可以实时地作用于转子,来产生同极性或不同极性的磁场来驱动或者阻止转子转动。这里就需要一个可变的定子磁场来控制转子转动,这种方案一般被称为(vector control)矢量控制或者FOC(field-oriented control)定向磁场控制。通过控制三个定子线圈的电流来产生持续变动的磁场方向。来控制转子精确地转动。注意,这种控制三个定子定子的电流是同时打开的,只是大小不一样。
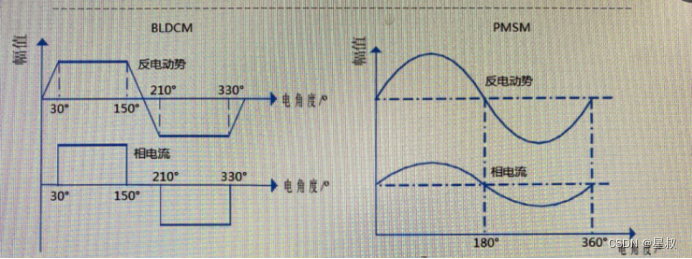
所以我们可以看到BLDCM和PMSM的控制波形分别如下所示:PMSW三项都在输出占空比,控制线圈电流。且恒速运行时三项输出的PWM占空比都在有规律的变化。
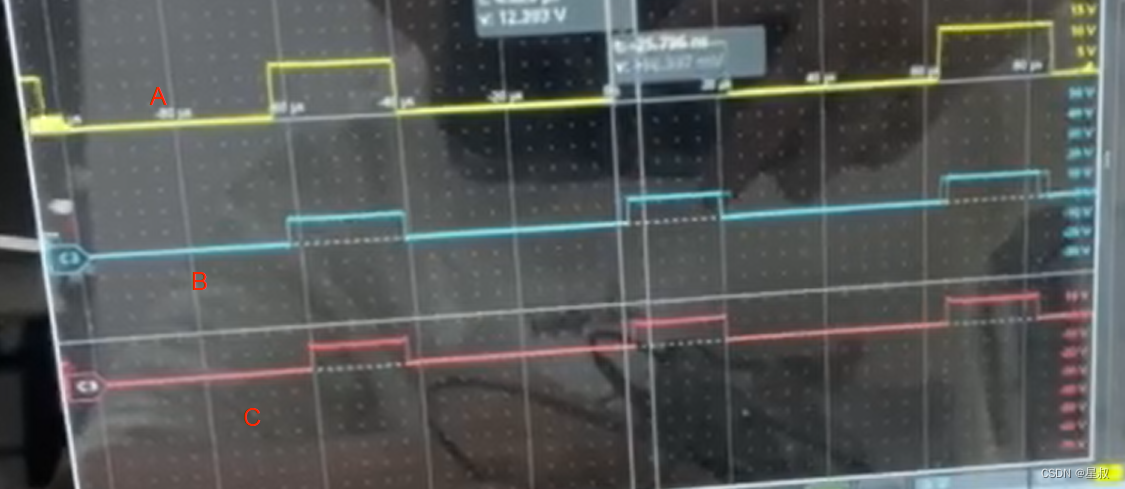
BLDCM同时控制两路线圈:只有两项定子线圈通过电流产生磁场。且当电机转动时没相产生恒定的PWM波形,如下图,产生100%的PWM。(作为参考,每次只打开一相定子线圈)
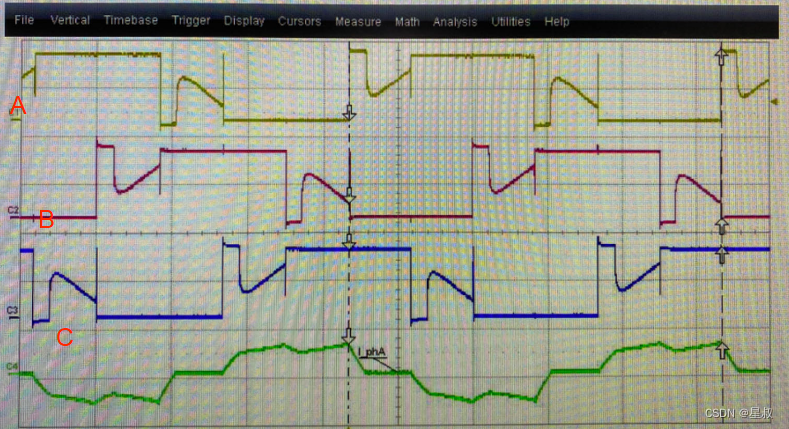
所以,后期我们可以看到PMSM定子相电流的大小,如下:PMSM为正弦;BLDCM在恒速模式下为固定的矩形波形。
同样在控制高精度的PMSW电机时,我们要精确地控制磁场的方向就需要知道电机转子的位置。同时我们使用编码器,磁编码能够精确地获取转子的位置。
PMSW电机控制行业内,Rensas瑞萨、和Infinion英飞凌都给出了经典的控制方案。在实时采集转子角度的同时,都可以实现控制SVPWM中央对齐PWM控制。英飞凌可以采用CCU6或者GTM定时器;瑞萨采用MSG电机控制器,同时都可以使用硬件触发ADC采集相电流,从而实现PID(Proportion(比例);Integration(积分);Differentiation(微分))调节目标转速。