系列文章目录
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记01:赛事介绍与硬件平台
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记02:开发环境安装
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记03:G4时钟结构
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记04:从零开始创建工程模板并开始点灯
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记05:Systick滴答定时器
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记06:按键输入
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记07:ADC模数转换
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记08:LCD液晶屏
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记09:EEPROM
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记10:USART串口通讯
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记11:数字电位器MCP4017
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记12:DAC数模转换
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记13:RTC实时时钟
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记14:PWM捕获
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记15:PWM输出
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记16:蓝桥杯编程手册
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记17:第十四届省赛真题
前言
上节课讲解了PWM捕获,这节课讲解一下PWM的输出,也就是用STM32进行编程,让在特定的管脚上产生PWM信号,这个信号的占空比和频率是可调节的。
我们知道开发板上有两个排针:

这些排针上对应的是相应的管脚,其中PA1-7都是可以用作PWM输出的(当然也可以用作捕获),不同管脚对应TIM的不同通道,只需要在CubeMX中配置引脚就可以看到对应的通道了。上一节我们PWM捕获也用到TIM,这里我们PWM输出的时候就不要用相同的TIM了,比方说上一届我们用的TIM2捕获,这节我们可以用其他的TIM输出如TIM16和TIM17,他们对应的是PA6和PA7管脚。我们本节以PA7为例。
一、基础知识
我们先了解一下PWM输出的基本原理。
PWM输出的本质也是定时器,只要开启TIM定时器,CNT计数器就开始++了,然后我们根据配置(一般还是1us)来计时。在捕获中我们一嘴带过了一下ARR,ARR是自动重装载寄存器,相当于计数的周期,计数到了周期之后会自动溢出重新计数。在捕获中我们是不需要溢出的,所以直接设置的最大值0xFFFFFFFF,但是在PWM输出里面我们是需要它溢出的,因为这样就可以通过ARR让CNT隔一段时间清零,实现了信号的周期变化。CNT每数到数就重新计数,比如ARR固定为1000,那么周期就是1000us,即1ms。
除此之外还有一个CCRx比较寄存器,用于控制高电平的时间,当CNT计数到CCRx时,输出极性会翻转,这样我们就可以控制PWM的占空比了。其中的x对应不同的通道,比如CCR1就对应通道1,因为定时器有很多个通道,这样不同的通道就有不同的比较值可以设置。但是ARR是整个定时器都共用的。
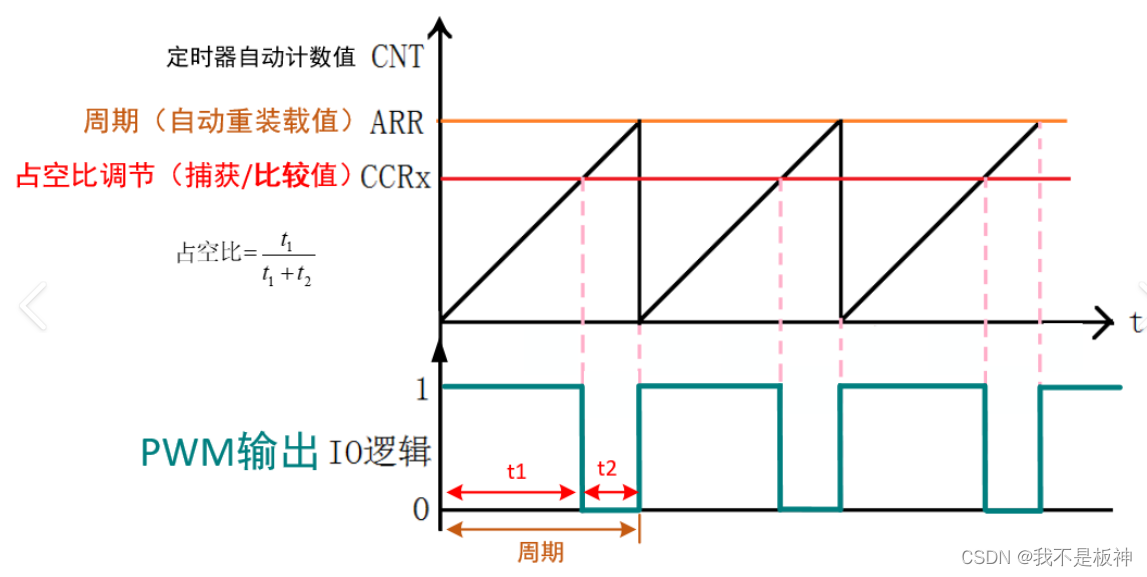
比如我们可以设置(CNT<=CCRx)时,引脚输出1,(CNT>=CCRx)时,引脚输出0,这样通过调整CCRx就可以调节占空比了。至于这个谁是高电平谁是低电平我们是可以自己设置的。
二、产生一路PWM信号
1.CubeMX配置
我们用PA7,也就是定时器17的通道1来输出PWM,我们来看一下怎么配置。
先勾选PA7。

然后找TIM17,点Activated激活,并在通道1选择PWM输出模式。(不选择输出比较模式是因为这里PWM输出模式更为方便,可以直接调整周期和占空比)

PWM输出就不用选择中断了。然后开始配置Configuration。
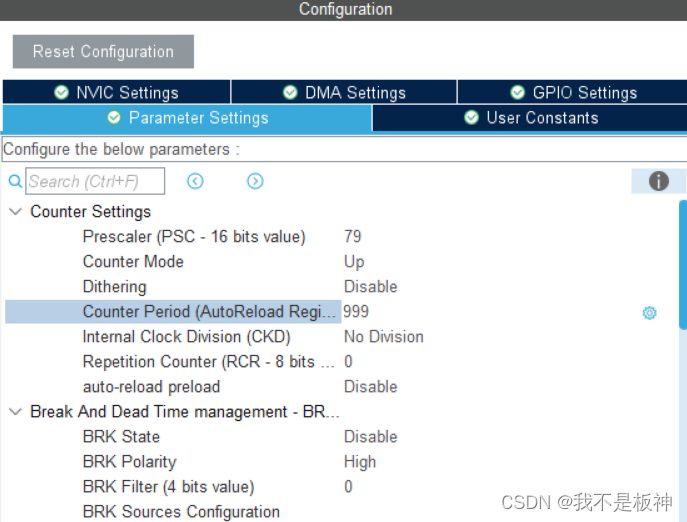
Prescaler分频我们还是选择79。Counter Mode依然是up向上计数模式,不用更改。
Counter Period就是我们的ARR寄存器,用来控制周期和频率的。我们假设要生成的频率是1kHz,那么周期就是1ms,那么就需要1000个CNT,所以Counter Period我们设置成999。其他的保持默认即可。
最下面的PWM输出通道1还需要更改一下,里面有一个选择PWM模式1还是模式2,这两个的区别就是,模式1代表CNT<CCR1的时候为活跃状态(在底下的CH Polarity可以设置活跃状态是high还是low,如果是high就代表高电平),模式2代表CNT<CCR1的时候为非活跃状态。所以我们推荐配置模式1,活跃状态是high,这样配合起来的效果就是:CNT<CCR1时为高电平,CNT>CCR1时为低电平。
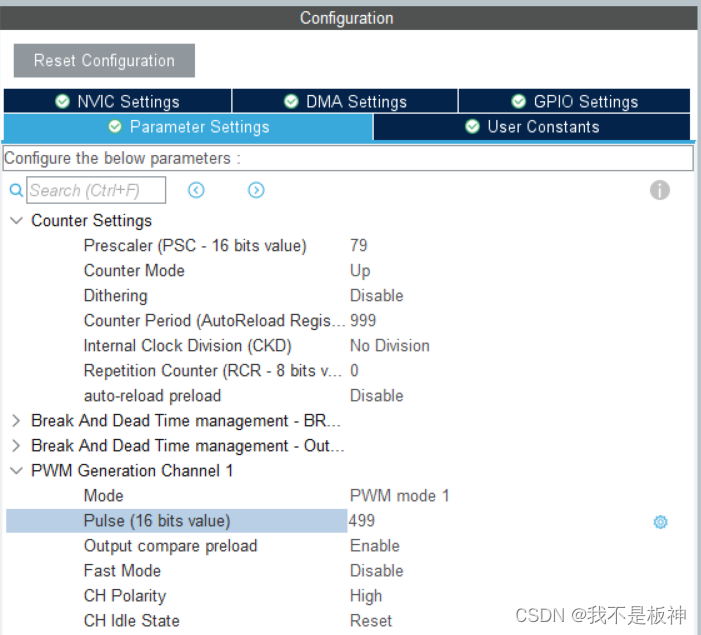
而这里的Pulse就是我们所说的CCRx寄存器,用于控制PWM的占空比(如果按照上面的设置,Pulse就是高电平的时间)。因为前面设置了周期是1000,那么如果这里设置200,就代表着20%的占空比。
最底下还有个CH Idle State,就是PWM不输出的时候默认是低电平状态还是高电平状态,我们保持默认Reset低电平状态就好。
所以我们总结一下要改的地方:先勾选一下激活,然后选择模式为PWM输出模式,然后预分频设置为79(每1us计数一次),然后设置Counter Period为999(周期为1000us),然后设置Pulse(高电平时间)。
这样我们就配置好了,生成工程即可。
2.程序设计
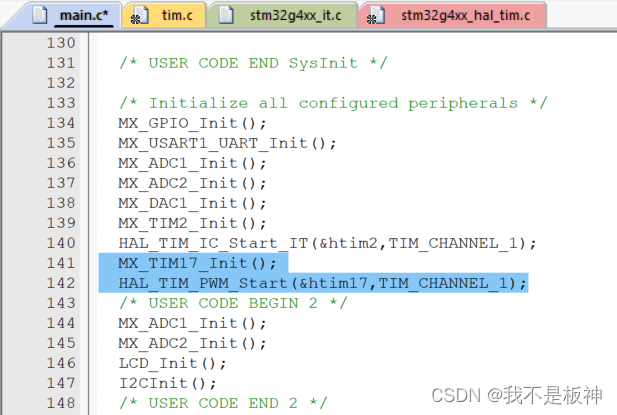
配置完之后我们可以看一下TIM17的初始化代码,这里我们可以看到刚刚配置的周期和高电平时间都已经生成好了,分别用htim17.Init.Period和sConfigOC.Pulse表示。

然后我们就可以进行程序设计了,先调用一下TIM17的初始化函数MX_TIM17_Init(),然后开启PWM输出:HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1)。
我们编译下载到开发板就直接可以输出了。
当然我们也可以改变PWM的周期和占空比,直接用对应的寄存器改就行了(ARR、CCR1),比如:
TIM17->ARR = 499;//周期改为500us,频率为2kHz
TIM17->CCR1 = 250;//占空比为50%因为是操作寄存器的,所以可以直接改,比较方便。
也可以设置一个变量,然后通过按键调占空比等等。
u16 cycle = 499;
u16 high_time = 250;
void PWM_Out_Process()
{
TIM17->ARR = cycle;//周期为cycle+1=500us,频率为2kHz
TIM17->CCR1 = high_time;//占空比为high_time/(cycle+1),即50%
}







![[OAuth2]authorization_request_not_found](https://img-blog.csdnimg.cn/direct/f091c11293c742f6a47a3cc00fbb09da.png)