颜色空间转换有很多相关标准:
https://docs.opencv.org/3.4.0/de/d25/imgproc_color_conversions.html
https://www.itu.int/rec/R-REC-BT.601-4-199407-S/en
ffmpeg命令行颜色空间转换是通过调用vf_scale中的swscale来进行转码。
我们通过gdb来调试ffmpeg.
首先编译ffmpeg n4.5.编译脚本如下:
./configure \
--prefix=/workspace/FFmpeg-n4.5-dev/libffmpeg \
--enable-shared \
--disable-static \
--extra-cflags=-g \
--enable-debug \
--disable-optimizations \
--disable-stripping
make -j8
make install
编译后我们找到ffmpeg_g来进行追踪。
gdb ./ffmpeg_g
set args -y -i /workspace/libx264_640x360_baseline_5_frames.h264 "scale=in_color_matrix=bt601:in_range=2" -pix_fmt bgr24 ffmpeg-bgr24.rgb
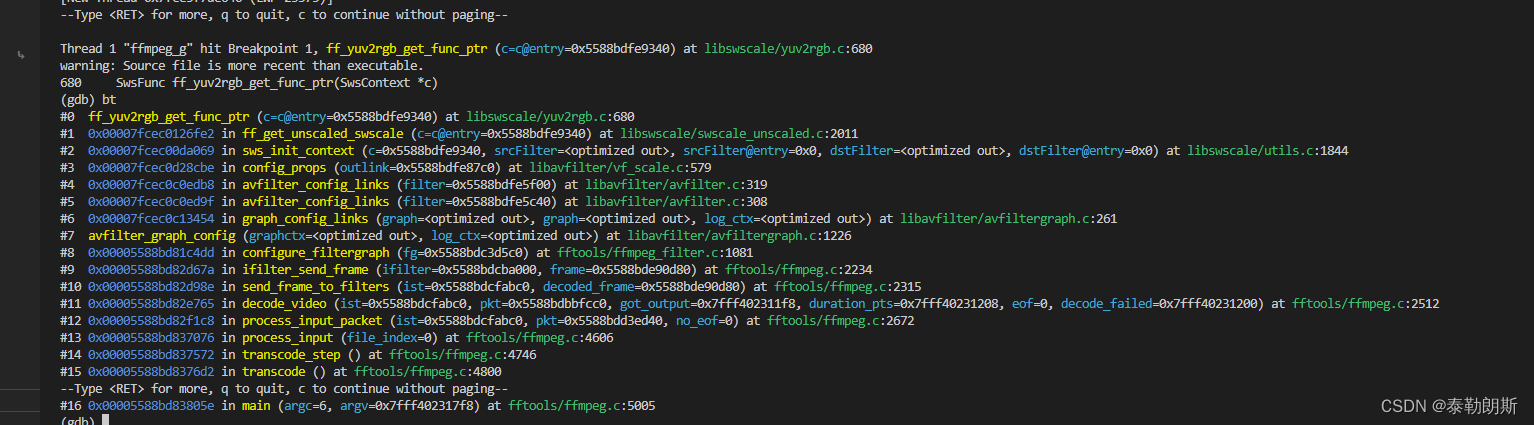
b yuv2rgb.c:ff_yuv2rgb_get_func_ptr
ffmpeg调用栈如下:
下面这个是初始化调用,最后调用到ff_yuv2rgb_get_func_ptr
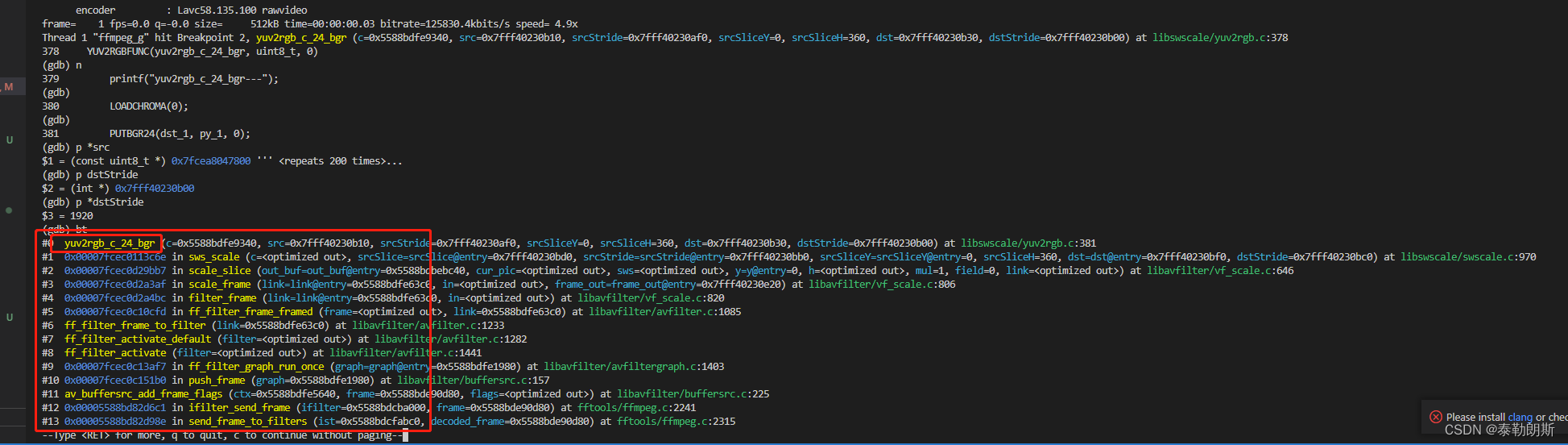
下面是正常csc中调用流程:
ifilter_send_frame()
configure_filtergraph(fg)
avfilter_graph_config(fg->graph, NULL))
graph_config_links(graphctx, log_ctx))
avfilter_config_links(filt))
config_link(link)->config_props(AVFilterLink *outlink)
sws_init_context(*s, NULL, NULL))
上面調用了:
static const AVClass scale_class = {
.class_name = "scale",
.item_name = av_default_item_name,
.option = scale_options,
.version = LIBAVUTIL_VERSION_INT,
.category = AV_CLASS_CATEGORY_FILTER,
#if FF_API_CHILD_CLASS_NEXT
.child_class_next = child_class_next,
#endif
.child_class_iterate = child_class_iterate,
};
static const AVFilterPad avfilter_vf_scale_inputs[] = {
{
.name = "default",
.type = AVMEDIA_TYPE_VIDEO,
.filter_frame = filter_frame,
},
{ NULL }
};
static const AVFilterPad avfilter_vf_scale_outputs[] = {
{
.name = "default",
.type = AVMEDIA_TYPE_VIDEO,
.config_props = config_props,
},
{ NULL }
};
AVFilter ff_vf_scale = {
.name = "scale",
.description = NULL_IF_CONFIG_SMALL("Scale the input video size and/or convert the image format."),
.init_dict = init_dict,
.uninit = uninit,
.query_formats = query_formats,
.priv_size = sizeof(ScaleContext),
.priv_class = &scale_class,
.inputs = avfilter_vf_scale_inputs,
.outputs = avfilter_vf_scale_outputs,
.process_command = process_command,
};
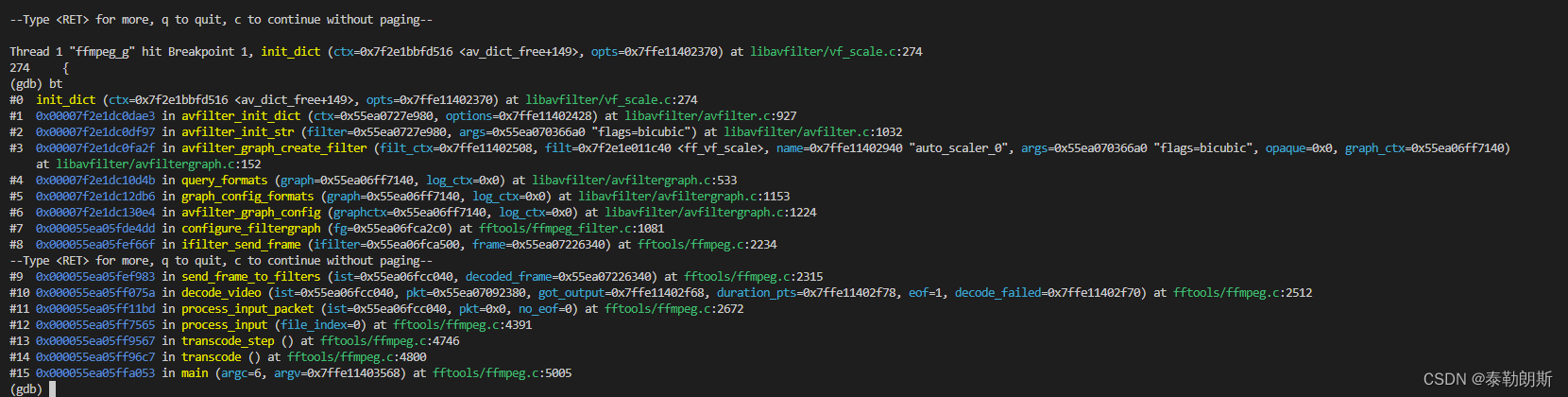
下面是调用inid_dict的调用栈:
下面是调用:parse_yuv_type()
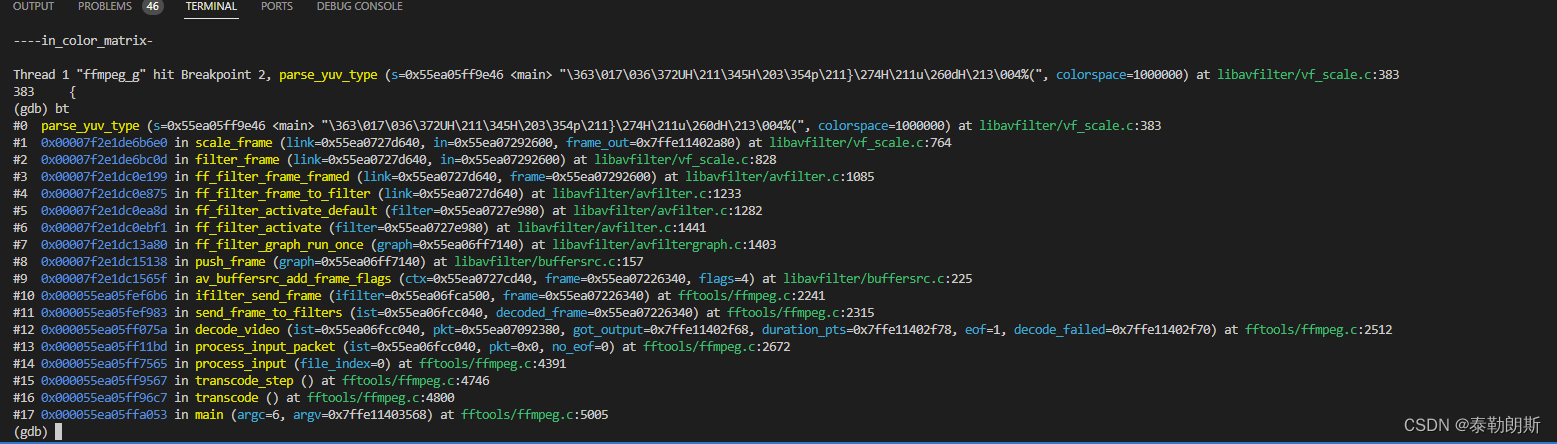
static const int *parse_yuv_type(const char *s, enum AVColorSpace colorspace)
{
printf("parse_yuv_type=%s>>>>>>>>\n",s);
if (!s)
s = "bt601";
if (s && strstr(s, "bt709")) {
colorspace = AVCOL_SPC_BT709;
} else if (s && strstr(s, "fcc")) {
colorspace = AVCOL_SPC_FCC;
} else if (s && strstr(s, "smpte240m")) {
colorspace = AVCOL_SPC_SMPTE240M;
} else if (s && (strstr(s, "bt601") || strstr(s, "bt470") || strstr(s, "smpte170m"))) {
colorspace = AVCOL_SPC_BT470BG;
} else if (s && strstr(s, "bt2020")) {
colorspace = AVCOL_SPC_BT2020_NCL;
}
if (colorspace < 1 || colorspace > 10 || colorspace == 8) {
colorspace = AVCOL_SPC_BT470BG;
}
printf("colorspace=%d>>>>>>>>\n",colorspace);
return sws_getCoefficients(colorspace);
}
static int scale_frame(AVFilterLink *link, AVFrame *in, AVFrame **frame_out)
{
AVFilterContext *ctx = link->dst;
ScaleContext *scale = ctx->priv;
AVFilterLink *outlink = ctx->outputs[0];
AVFrame *out;
...
scale:
if (!scale->sws) {
*frame_out = in;
return 0;
}
...
in_range = in->color_range;
if ( scale->in_color_matrix
|| scale->out_color_matrix
|| scale-> in_range != AVCOL_RANGE_UNSPECIFIED
|| in_range != AVCOL_RANGE_UNSPECIFIED
|| scale->out_range != AVCOL_RANGE_UNSPECIFIED) {
int in_full, out_full, brightness, contrast, saturation;
const int *inv_table, *table;
sws_getColorspaceDetails(scale->sws, (int **)&inv_table, &in_full,
(int **)&table, &out_full,
&brightness, &contrast, &saturation);
//这里使用了两个输入矩阵设置,因为in_color_matrix和out_color_matrix默认是auto,所以外边设置了out_color_matrix
//之后是没有用的,好奇怪
if (scale->in_color_matrix)
inv_table = parse_yuv_type(scale->in_color_matrix, in->colorspace);
if (scale->out_color_matrix)
table = parse_yuv_type(scale->out_color_matrix, AVCOL_SPC_UNSPECIFIED);
else if (scale->in_color_matrix)
table = inv_table;
if (scale-> in_range != AVCOL_RANGE_UNSPECIFIED)
in_full = (scale-> in_range == AVCOL_RANGE_JPEG);
else if (in_range != AVCOL_RANGE_UNSPECIFIED)
in_full = (in_range == AVCOL_RANGE_JPEG);
if (scale->out_range != AVCOL_RANGE_UNSPECIFIED)
out_full = (scale->out_range == AVCOL_RANGE_JPEG);
sws_setColorspaceDetails(scale->sws, inv_table, in_full,
table, out_full,
brightness, contrast, saturation);
if (scale->isws[0])
sws_setColorspaceDetails(scale->isws[0], inv_table, in_full,
table, out_full,
brightness, contrast, saturation);
if (scale->isws[1])
sws_setColorspaceDetails(scale->isws[1], inv_table, in_full,
table, out_full,
brightness, contrast, saturation);
out->color_range = out_full ? AVCOL_RANGE_JPEG : AVCOL_RANGE_MPEG;
}
av_reduce(&out->sample_aspect_ratio.num, &out->sample_aspect_ratio.den,
(int64_t)in->sample_aspect_ratio.num * outlink->h * link->w,
(int64_t)in->sample_aspect_ratio.den * outlink->w * link->h,
INT_MAX);
if (scale->interlaced>0 || (scale->interlaced<0 && in->interlaced_frame)) {
scale_slice(link, out, in, scale->isws[0], 0, (link->h+1)/2, 2, 0);
scale_slice(link, out, in, scale->isws[1], 0, link->h /2, 2, 1);
} else if (scale->nb_slices) {
int i, slice_h, slice_start, slice_end = 0;
const int nb_slices = FFMIN(scale->nb_slices, link->h);
for (i = 0; i < nb_slices; i++) {
slice_start = slice_end;
slice_end = (link->h * (i+1)) / nb_slices;
slice_h = slice_end - slice_start;
scale_slice(link, out, in, scale->sws, slice_start, slice_h, 1, 0);
}
} else {
scale_slice(link, out, in, scale->sws, 0, link->h, 1, 0);
}
av_frame_free(&in);
return 0;
}
最终是调用yuv2rgb_c_24_bgr():
这个命令可以简单的将宏展开
gcc -E -P file.c >> out.c
ffmpeg swscale颜色空间转换是采用查表法,用了4个表,具体可以看代码查看具体算法
#define YUVRGB_TABLE_HEADROOM 512
#define YUVRGB_TABLE_LUMA_HEADROOM 512
static int yuv2rgb_c_24_bgr(SwsContext *c, const uint8_t *src[], int srcStride[],
int srcSliceY, int srcSliceH, uint8_t *dst[], int dstStride[]) {
int y;
if (!0 && c->srcFormat == AV_PIX_FMT_YUV422P) {
srcStride[1] *= 2;
srcStride[2] *= 2;
}
for (y = 0; y < srcSliceH; y += 2) {
int yd = y + srcSliceY;
uint8_t * dst_1 = (uint8_t *)(dst[0] + (yd)*dstStride[0]);
uint8_t * dst_2 = (uint8_t *)(dst[0] + (yd + 1) * dstStride[0]);
uint8_t * r, *g, *b;
const uint8_t *py_1 = src[0] + y * srcStride[0];
const uint8_t *py_2 = py_1 + srcStride[0];
const uint8_t *pu = src[1] + (y >> 1) * srcStride[1];
const uint8_t *pv = src[2] + (y >> 1) * srcStride[2];
const uint8_t *pa_1, *pa_2;
unsigned int h_size = c->dstW >> 3;
if (0) {
pa_1 = src[3] + y * srcStride[3];
pa_2 = pa_1 + srcStride[3];
}
while (h_size--) {
int U, V, Y;
U = pu[0];
V = pv[0];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_1[2 * 0];
dst_1[6 * 0 + 0] = b[Y];
dst_1[6 * 0 + 1] = g[Y];
dst_1[6 * 0 + 2] = r[Y];
Y = py_1[2 * 0 + 1];
dst_1[6 * 0 + 3] = b[Y];
dst_1[6 * 0 + 4] = g[Y];
dst_1[6 * 0 + 5] = r[Y];
;
Y = py_2[2 * 0];
dst_2[6 * 0 + 0] = b[Y];
dst_2[6 * 0 + 1] = g[Y];
dst_2[6 * 0 + 2] = r[Y];
Y = py_2[2 * 0 + 1];
dst_2[6 * 0 + 3] = b[Y];
dst_2[6 * 0 + 4] = g[Y];
dst_2[6 * 0 + 5] = r[Y];
;
U = pu[1];
V = pv[1];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_2[2 * 1];
dst_2[6 * 1 + 0] = b[Y];
dst_2[6 * 1 + 1] = g[Y];
dst_2[6 * 1 + 2] = r[Y];
Y = py_2[2 * 1 + 1];
dst_2[6 * 1 + 3] = b[Y];
dst_2[6 * 1 + 4] = g[Y];
dst_2[6 * 1 + 5] = r[Y];
;
Y = py_1[2 * 1];
dst_1[6 * 1 + 0] = b[Y];
dst_1[6 * 1 + 1] = g[Y];
dst_1[6 * 1 + 2] = r[Y];
Y = py_1[2 * 1 + 1];
dst_1[6 * 1 + 3] = b[Y];
dst_1[6 * 1 + 4] = g[Y];
dst_1[6 * 1 + 5] = r[Y];
;
U = pu[2];
V = pv[2];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_1[2 * 2];
dst_1[6 * 2 + 0] = b[Y];
dst_1[6 * 2 + 1] = g[Y];
dst_1[6 * 2 + 2] = r[Y];
Y = py_1[2 * 2 + 1];
dst_1[6 * 2 + 3] = b[Y];
dst_1[6 * 2 + 4] = g[Y];
dst_1[6 * 2 + 5] = r[Y];
;
Y = py_2[2 * 2];
dst_2[6 * 2 + 0] = b[Y];
dst_2[6 * 2 + 1] = g[Y];
dst_2[6 * 2 + 2] = r[Y];
Y = py_2[2 * 2 + 1];
dst_2[6 * 2 + 3] = b[Y];
dst_2[6 * 2 + 4] = g[Y];
dst_2[6 * 2 + 5] = r[Y];
;
U = pu[3];
V = pv[3];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_2[2 * 3];
dst_2[6 * 3 + 0] = b[Y];
dst_2[6 * 3 + 1] = g[Y];
dst_2[6 * 3 + 2] = r[Y];
Y = py_2[2 * 3 + 1];
dst_2[6 * 3 + 3] = b[Y];
dst_2[6 * 3 + 4] = g[Y];
dst_2[6 * 3 + 5] = r[Y];
;
Y = py_1[2 * 3];
dst_1[6 * 3 + 0] = b[Y];
dst_1[6 * 3 + 1] = g[Y];
dst_1[6 * 3 + 2] = r[Y];
Y = py_1[2 * 3 + 1];
dst_1[6 * 3 + 3] = b[Y];
dst_1[6 * 3 + 4] = g[Y];
dst_1[6 * 3 + 5] = r[Y];
;
pu += 4 >> 0;
pv += 4 >> 0;
py_1 += 8 >> 0;
py_2 += 8 >> 0;
dst_1 += 24 >> 0;
dst_2 += 24 >> 0;
}
if (c->dstW & (4 >> 0)) {
int av_unused Y, U, V;
U = pu[0];
V = pv[0];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_1[2 * 0];
dst_1[6 * 0 + 0] = b[Y];
dst_1[6 * 0 + 1] = g[Y];
dst_1[6 * 0 + 2] = r[Y];
Y = py_1[2 * 0 + 1];
dst_1[6 * 0 + 3] = b[Y];
dst_1[6 * 0 + 4] = g[Y];
dst_1[6 * 0 + 5] = r[Y];
;
Y = py_2[2 * 0];
dst_2[6 * 0 + 0] = b[Y];
dst_2[6 * 0 + 1] = g[Y];
dst_2[6 * 0 + 2] = r[Y];
Y = py_2[2 * 0 + 1];
dst_2[6 * 0 + 3] = b[Y];
dst_2[6 * 0 + 4] = g[Y];
dst_2[6 * 0 + 5] = r[Y];
;
U = pu[1];
V = pv[1];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_2[2 * 1];
dst_2[6 * 1 + 0] = b[Y];
dst_2[6 * 1 + 1] = g[Y];
dst_2[6 * 1 + 2] = r[Y];
Y = py_2[2 * 1 + 1];
dst_2[6 * 1 + 3] = b[Y];
dst_2[6 * 1 + 4] = g[Y];
dst_2[6 * 1 + 5] = r[Y];
;
Y = py_1[2 * 1];
dst_1[6 * 1 + 0] = b[Y];
dst_1[6 * 1 + 1] = g[Y];
dst_1[6 * 1 + 2] = r[Y];
Y = py_1[2 * 1 + 1];
dst_1[6 * 1 + 3] = b[Y];
dst_1[6 * 1 + 4] = g[Y];
dst_1[6 * 1 + 5] = r[Y];
;
pu += 4 >> 1;
pv += 4 >> 1;
py_1 += 8 >> 1;
py_2 += 8 >> 1;
dst_1 += 24 >> 1;
dst_2 += 24 >> 1;
}
if (c->dstW & (4 >> 1)) {
int av_unused Y, U, V;
U = pu[0];
V = pv[0];
r = (void *)c->table_rV[V + YUVRGB_TABLE_HEADROOM];
g = (void *)(c->table_gU[U + YUVRGB_TABLE_HEADROOM] +
c->table_gV[V + YUVRGB_TABLE_HEADROOM]);
b = (void *)c->table_bU[U + YUVRGB_TABLE_HEADROOM];
;
Y = py_1[2 * 0];
dst_1[6 * 0 + 0] = b[Y];
dst_1[6 * 0 + 1] = g[Y];
dst_1[6 * 0 + 2] = r[Y];
Y = py_1[2 * 0 + 1];
dst_1[6 * 0 + 3] = b[Y];
dst_1[6 * 0 + 4] = g[Y];
dst_1[6 * 0 + 5] = r[Y];
;
Y = py_2[2 * 0];
dst_2[6 * 0 + 0] = b[Y];
dst_2[6 * 0 + 1] = g[Y];
dst_2[6 * 0 + 2] = r[Y];
Y = py_2[2 * 0 + 1];
dst_2[6 * 0 + 3] = b[Y];
dst_2[6 * 0 + 4] = g[Y];
dst_2[6 * 0 + 5] = r[Y];
;
}
}
return srcSliceH;
}