很久没遇到Floyd算法的题目了,2642. 设计可以求最短路径的图类刚好是一个典型。在实现核心算法之余,顺便整理一下算法的内核。
Floyd-Warshall’s Algorithm
Floyd-Warshall算法,简称Floyd算法,是“有向图非负权图的多源最短路”的经典算法和通用解法,以极其精炼的代码著称:
let dist be a |V| × |V| array of minimum distances initialized to ∞ (infinity)
for each edge (u, v) do
dist[u][v] ← w(u, v) // The weight of the edge (u, v)
for each vertex v do
dist[v][v] ← 0
for k from 1 to |V|
for i from 1 to |V|
for j from 1 to |V|
if dist[i][j] > dist[i][k] + dist[k][j]
dist[i][j] ← dist[i][k] + dist[k][j]
end if
算法核心的三层循环,最外层的k,作为串联首位节点i、j的中间节点,其必须位于最外层,否则算法的正确性就遭到了破坏。由于整个迭代的主次序是由k决定的,就好像将中间节点一个一个地“插入”进来,所以Floyd算法又被称为“插点法”。这个不能随意改变次序的三层循环,实际上正是“动态规划”所严格强调的“子状态”和“顺序”的核心体现。
插点法与动态规划
从伪码上看,我们的整个动态规划的状态转移似乎是:
d
i
s
t
[
i
]
[
j
]
=
m
i
n
(
d
i
s
t
[
i
]
[
j
]
,
d
i
s
t
[
i
]
[
k
]
+
d
i
s
t
[
k
]
[
j
]
)
\displaystyle \mathrm {dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j])}
dist[i][j]=min(dist[i][j],dist[i][k]+dist[k][j])
但如果任意翻一本教科书,会找到的其实是另一种形式的转移方程:
d
i
s
t
[
i
]
[
j
]
[
k
]
=
m
i
n
(
d
i
s
t
[
i
]
[
j
]
[
k
−
1
]
,
d
i
s
t
[
i
]
[
k
]
[
k
−
1
]
+
d
i
s
t
[
k
]
[
j
]
[
k
−
1
]
)
\displaystyle \mathrm { dist[i][j][k] = min(dist[i][j][k-1], dist[i][k][k-1] + dist[k][j][k-1])}
dist[i][j][k]=min(dist[i][j][k−1],dist[i][k][k−1]+dist[k][j][k−1])
我们发现第三个维度被大多数写法有意无意地隐藏掉了,这其实是很常见的优化手段。但如果没看过原始版本的转移方程,就很容易误认为只有两个维度,迭代顺序也可以调换。那怎么理解这个原始转移方程呢?dist[i][j][k]实际上代表的是,我们定义一个中间节点集合S = {0, 1, 2, ..., k-1},让这k个点以任意顺序组合插入到i和j之间时,从i到j的最短路径长度;不失一般性,k = 0表示中间节点为空集合,那么dist[i][j][0]就是直接从i出发到j的边的长度。所以迭代过程中,我们实际上一个一个地将节点加入到集合S中,所以这个顺序是不能调换的。注意,我们说到中间节点的任意组合,实际上意味着多少种组合呢?能否理解好这点,决定了我们能不能彻底看清Floyd算法的本质。
插点与最短路
为了理解插点法的魅力,我们先来思考一下我们在处理的问题是一个怎样规模的系统。首先,在有向图里,我们能有多少条不重复的边呢?如果节点数为n,我们从每个节点出发,都能到达另外的n-1个节点,所以边的数量最多为n(n-1)。那么,我们能构成多少条不同的路径呢?有一个直觉是,如果不对这个问题加一个限定,它将导向+∞。
因为这样的“富边图”里一定有环,只要有环,路径数就是无穷多的。但是我们可以很简单地加一个限定,就是找一找不经过重复节点的路径数量。因此,从i到j的不经过重复节点的路径数量是另外n-2个节点的全排列组合的总和:
C n − 2 n − 2 ( n − 2 ) ! + C n − 2 n − 3 ( n − 3 ) ! + . . . + C n − 2 0 = ∑ k = 0 n − 2 C n − 2 k k ! \displaystyle \mathrm{C_{n-2}^{n-2}(n-2)! + C_{n-2}^{n-3}(n-3)! + ... + C_{n-2}^{0} = \sum_{k=0}^{n-2} C_{n-2}^{k}k!} Cn−2n−2(n−2)!+Cn−2n−3(n−3)!+...+Cn−20=k=0∑n−2Cn−2kk!
其中k同前文所述,代表我们引入了k个插点。我们简单放大一下,发现单源情况下路径数量应该是(n-1)!级别:
∑ k = 0 n − 2 C n − 2 k k ! ≤ ( n − 1 ) ( n − 2 ) ! = ( n − 1 ) ! \displaystyle \mathrm{ \sum_{k=0}^{n-2} C_{n-2}^{k}k! ≤ (n-1)(n-2)! = (n-1)!} k=0∑n−2Cn−2kk!≤(n−1)(n−2)!=(n−1)!
如果再枚举一下起点和终点,整个“多源最短路问题”的复杂度是
O
(
n
!
)
\displaystyle \mathrm {O(n!)}
O(n!)级别,甚至大于指数级。那么Floyd算法能在多项式时间
O
(
n
3
)
\displaystyle \mathrm {O(n^3)}
O(n3)内,完成对该问题的解答,并且还如此精炼,无疑是动态规划的强大魔力。此外,我们仔细检查上面这些路径也恰恰是“最短路”的备选路径,因为我们可以简单用反证法证明,在路径中引入任意一个重复节点,都必然存在比其更优的路径。
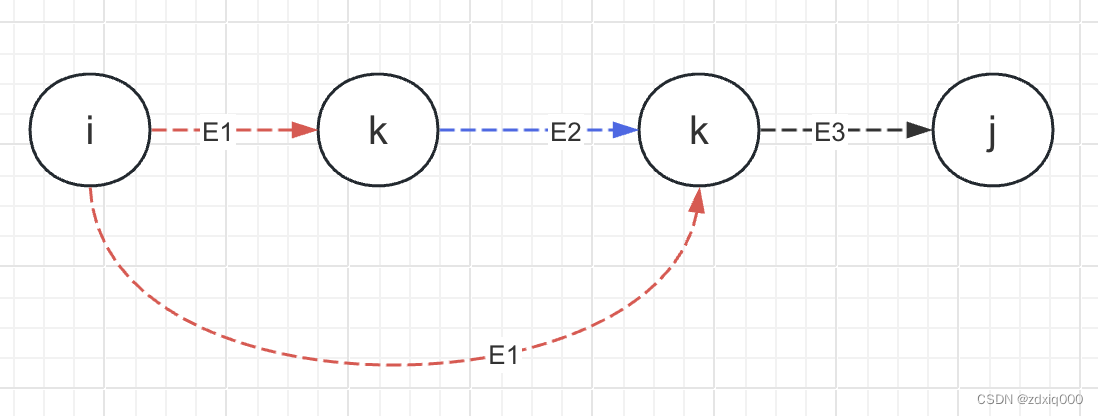
如上图所示,如果路径中存在重复的中间节点,因为图里没有负权边,所以上面三条路径E1、E2、E3一定都大于等于0,那么必然有:
E
1
+
E
3
<
=
E
1
+
E
2
+
E
3
\displaystyle \mathrm { E1 + E3 <= E1 + E2 + E3}
E1+E3<=E1+E2+E3
则我们必然可以通过精简掉E2这段路达到一个相对更短的路径,所以存在重复节点的路径必然不是最短路。
拆解插点法
现在我们回到插点法本身,继续讨论插点集合S和路径数量之间的关系。通过前面的分析,我们已经知道这个路径数量随着插点的增加是阶乘级别地上升,但刚开始还是相当温和的,比如在不插入点和只插入一个点时,总共的路径也就两条:
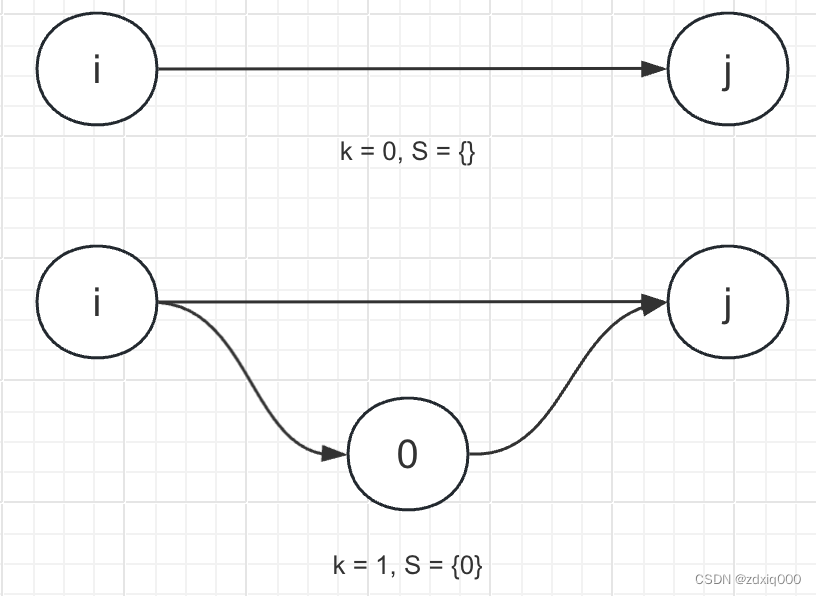
那么,当k=2时,又如何呢?我们发现路径开始快速膨胀。
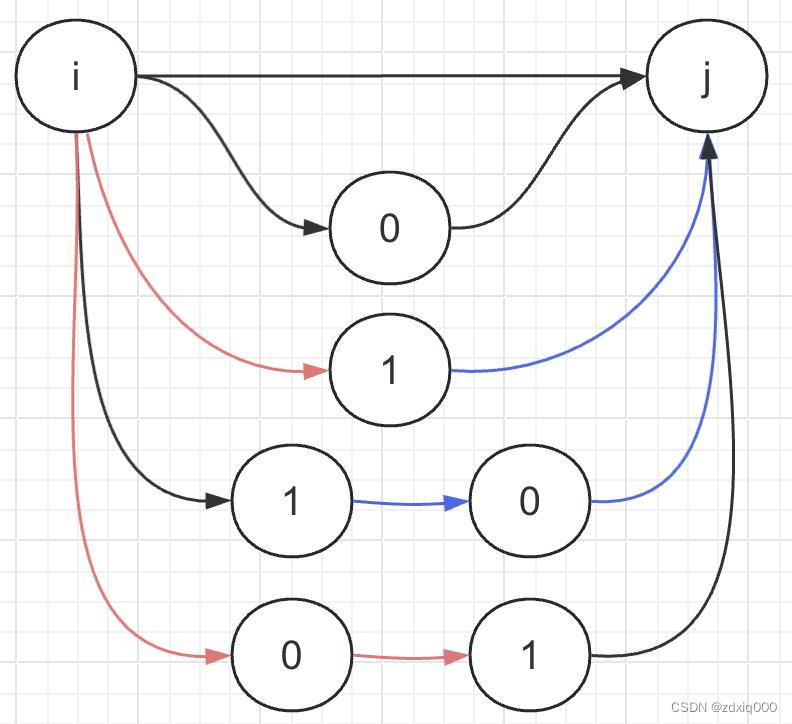
这里面我们发现通过一次状态转移,我们同时继承了插入一个以下节点的所有结果——例如,蓝色的路径其实是1到j目前(插一点)所有的备选路径、红色路径其实是i到0目前所有的备选路径。这些备选路径中的最短值,其实已经计算过了并且存储在
d
i
s
t
[
i
]
[
1
]
\displaystyle \mathrm{dist[i][1]}
dist[i][1]和
d
i
s
t
[
1
]
[
j
]
\displaystyle \mathrm{dist[1][j]}
dist[1][j]之中了,上面的图就是已经计算过的“路径的任意组合”,而所有最优、最短路径的再组合,就是Floyd算法动态规划中状态转移的实质。因此,在没有计算完所有插k-1点的组合之前,我们是绝对不可能计算插k点的最短路的。
总结
读者可以根据上面论述继续扩展,细细品味出其中的动态规划内核之精妙,也可以帮助我们更好地理解Floyd算法,避免强行进行记忆。