hdl SLAM和定位的关系:HDL和cartographer一样,是离线建图的

整个SLAM系统的架构

包含四个节点: 预处理、 帧匹配、hdl_slam、地面检测
输入点云首先经过预处理进行降采样,然后传给下一个节点。帧匹配通过迭代获取两帧之间运动变化的里程计,地面检测通过RANSAC检测地平面,检测的平面发送给hdl_slam模块。
hdl_graph_slam支持多种GPS数据格式,都会通过hdl转为UTM坐标系,并且将他们加入到3D位置约束,如果其高度为NAN值,则将GPS数据作为2D的约束,几何点为最基础的数据,由经纬高组成,尽管NavSatFix也提供很多的信息,但本工程值视野点位的信息忽略其他信息。
1.预处理模块
prefiltering_nodelet.cpp
通过看到其包含的头文件,即可发现该节点只依赖ros、pcl、tf库。文件只有一个类声明及实现,即PrefilteringNodelet类,它是继承了ros的nodelet::Nodelet的。

在构造后进行初始化:
获取ros句柄,根据ros句柄来初始化参数;通过IMU进行畸变去除,订阅IMU数据;订阅原始的激光数据,输出经过滤波后的点云。
virtual void onInit() {
nh = getNodeHandle();
private_nh = getPrivateNodeHandle();
initialize_params();
if(private_nh.param<bool>("deskewing", false)) {
imu_sub = nh.subscribe("/imu/data", 1, &PrefilteringNodelet::imu_callback, this);
}
points_sub = nh.subscribe("/velodyne_points", 64, &PrefilteringNodelet::cloud_callback, this);
points_pub = nh.advertise<sensor_msgs::PointCloud2>("/filtered_points", 32);
colored_pub = nh.advertise<sensor_msgs::PointCloud2>("/colored_points", 32);
}读取参数:有降采样方式(体素降采样、近似体素降采样)、降采样栅格大小、离群点去除方法(基于统计StatisticalOutlierRemoval, 基于半径 setRadiusSearch)、是否使用距离滤波,保留1-100m内的点云。
点云去畸变
//点云的去畸变
pcl::PointCloud<PointT>::ConstPtr deskewing(const pcl::PointCloud<PointT>::ConstPtr& cloud) {
ros::Time stamp = pcl_conversions::fromPCL(cloud->header.stamp);//获取时间戳
if(imu_queue.empty()) {
return cloud;
}
// the color encodes the point number in the point sequence
if(colored_pub.getNumSubscribers()) {
pcl::PointCloud<pcl::PointXYZRGB>::Ptr colored(new pcl::PointCloud<pcl::PointXYZRGB>());
colored->header = cloud->header;
colored->is_dense = cloud->is_dense;
colored->width = cloud->width;
colored->height = cloud->height;
colored->resize(cloud->size());
for(int i = 0; i < cloud->size(); i++) {
double t = static_cast<double>(i) / cloud->size();
colored->at(i).getVector4fMap() = cloud->at(i).getVector4fMap();
colored->at(i).r = 255 * t;
colored->at(i).g = 128;
colored->at(i).b = 255 * (1 - t);
}
colored_pub.publish(*colored); //区分帧头、帧尾的点云为不同颜色
}
//从IMU的头开始,一旦满足IMU的时间比点云时间新,就退出
sensor_msgs::ImuConstPtr imu_msg = imu_queue.front();
auto loc = imu_queue.begin();
for(; loc != imu_queue.end(); loc++) {
imu_msg = (*loc);
if((*loc)->header.stamp > stamp) {
break;
}
}
imu_queue.erase(imu_queue.begin(), loc); //删掉不符合要求的IMU数据
Eigen::Vector3f ang_v(imu_msg->angular_velocity.x, imu_msg->angular_velocity.y, imu_msg->angular_velocity.z);
ang_v *= -1; //取反
pcl::PointCloud<PointT>::Ptr deskewed(new pcl::PointCloud<PointT>()); //去畸变
deskewed->header = cloud->header;
deskewed->is_dense = cloud->is_dense;
deskewed->width = cloud->width;
deskewed->height = cloud->height;
deskewed->resize(cloud->size());
double scan_period = private_nh.param<double>("scan_period", 0.1); //读取帧时间差 10Hz,两帧之间差0.1s
for(int i = 0; i < cloud->size(); i++) {
const auto& pt = cloud->at(i);
// TODO: transform IMU data into the LIDAR frame
// 点云时间戳为帧头的时间,IMU数据为最接近帧头时间的数据
double delta_t = scan_period * static_cast<double>(i) / cloud->size(); //还原每一个点
//通过四元数的变化,小范围变化为(1,delta_t / 2.0 * ang_v[0],) 通过轴角的形式表达微小变化
Eigen::Quaternionf delta_q(1, delta_t / 2.0 * ang_v[0], delta_t / 2.0 * ang_v[1], delta_t / 2.0 * ang_v[2]);
Eigen::Vector3f pt_ = delta_q.inverse() * pt.getVector3fMap(); //以匀加速模型,将帧间内的对应点的位置转到帧头
deskewed->at(i) = cloud->at(i);
deskewed->at(i).getVector3fMap() = pt_;
}
return deskewed;
}点云回调
进行点云变化,转到base坐标系,去畸变,滤波、降采样等,发出新的经过处理的点云
void cloud_callback(const pcl::PointCloud<PointT>& src_cloud_r) {
pcl::PointCloud<PointT>::ConstPtr src_cloud = src_cloud_r.makeShared();
if(src_cloud->empty()) {
return;
}
//进行点云的去畸变
src_cloud = deskewing(src_cloud);
// if base_link_frame is defined, transform the input cloud to the frame
//获取base和激光之间的静态TF,通过查询进行调整
if(!base_link_frame.empty()) {
if(!tf_listener.canTransform(base_link_frame, src_cloud->header.frame_id, ros::Time(0))) {
std::cerr << "failed to find transform between " << base_link_frame << " and " << src_cloud->header.frame_id << std::endl;
}
tf::StampedTransform transform;
tf_listener.waitForTransform(base_link_frame, src_cloud->header.frame_id, ros::Time(0), ros::Duration(2.0));
tf_listener.lookupTransform(base_link_frame, src_cloud->header.frame_id, ros::Time(0), transform);
pcl::PointCloud<PointT>::Ptr transformed(new pcl::PointCloud<PointT>());
pcl_ros::transformPointCloud(*src_cloud, *transformed, transform);
transformed->header.frame_id = base_link_frame;
transformed->header.stamp = src_cloud->header.stamp;
src_cloud = transformed; //src_cloud此时已经是基于base坐标系的点云了
}
//距离滤波,去除超过100 及小于0.2的点
pcl::PointCloud<PointT>::ConstPtr filtered = distance_filter(src_cloud);
//根据选择的方法,进行体素降采样
filtered = downsample(filtered);
//离群点去除
filtered = outlier_removal(filtered);
//发布经过处理的点云
points_pub.publish(*filtered); ///filtered_points话题的
}
pcl::PointCloud<PointT>::ConstPtr downsample(const pcl::PointCloud<PointT>::ConstPtr& cloud) const {
if(!downsample_filter) {
return cloud;
}
pcl::PointCloud<PointT>::Ptr filtered(new pcl::PointCloud<PointT>());
downsample_filter->setInputCloud(cloud);
downsample_filter->filter(*filtered);
filtered->header = cloud->header;
return filtered;
}
pcl::PointCloud<PointT>::ConstPtr outlier_removal(const pcl::PointCloud<PointT>::ConstPtr& cloud) const {
if(!outlier_removal_filter) {
return cloud;
}
pcl::PointCloud<PointT>::Ptr filtered(new pcl::PointCloud<PointT>());
outlier_removal_filter->setInputCloud(cloud);
outlier_removal_filter->filter(*filtered);
filtered->header = cloud->header;
return filtered;
}
pcl::PointCloud<PointT>::ConstPtr distance_filter(const pcl::PointCloud<PointT>::ConstPtr& cloud) const {
pcl::PointCloud<PointT>::Ptr filtered(new pcl::PointCloud<PointT>());
filtered->reserve(cloud->size());
std::copy_if(cloud->begin(), cloud->end(), std::back_inserter(filtered->points), [&](const PointT& p) {
double d = p.getVector3fMap().norm();
return d > distance_near_thresh && d < distance_far_thresh;
});
filtered->width = filtered->size();
filtered->height = 1;
filtered->is_dense = false;
filtered->header = cloud->header;
return filtered;
}帧间匹配
ScanMatchingOdometryNodelet.cpp
同样看包括的头文件,可以发现该节点只依赖ros,pcl, tf以及
#include <hdl_graph_slam/ros_utils.hpp>
#include <hdl_graph_slam/registrations.hpp>
#include <hdl_graph_slam/ScanMatchingStatus.h>ros_utils.hpp
matrix2transform(): convert Eigen::Matrix to geometry_msgs::TransformStamped
Eigen::Isometry3d pose2isometry(const geometry_msgs::Pose& pose) 将pose信息转为Eigen::Isometry3d几何信息结构 以及其他的几个格式互转
registrations.hpp
选择某一种配准方式
ScanMatchingStatus.hpp为配准ros消息类型生成的头文件
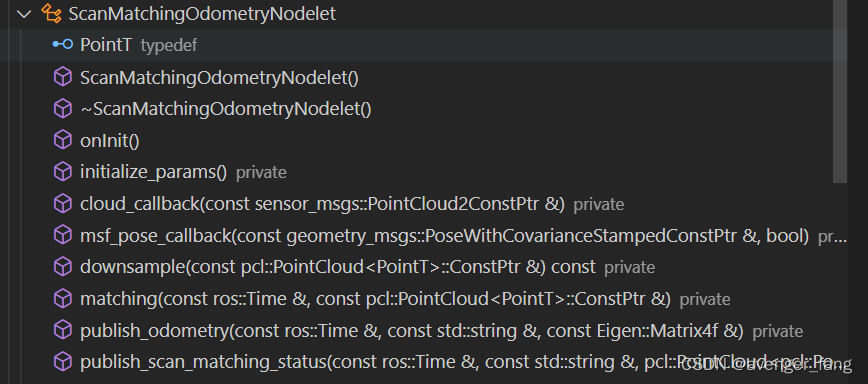
ScanMatchingOdometryNodelet这个类和之前预处理的类设计方式相似,通过初始化开启
先是获取ros句柄,然后初始化参数,如果使用IMU的前端(默认不使用的),则订阅/msf_core/pose和/msf_core/pose_after_update
否则直接订阅预处理后的/filtered_points,然后发布多个话题
初始化参数:
降采样、特征参数、配准参数
// 关键帧选择的特征阈值
keyframe_delta_trans = pnh.param<double>("keyframe_delta_trans", 0.25);
keyframe_delta_angle = pnh.param<double>("keyframe_delta_angle", 0.15);
keyframe_delta_time = pnh.param<double>("keyframe_delta_time", 1.0);
// Registration validation by thresholding 配准有效性阈值
transform_thresholding = pnh.param<bool>("transform_thresholding", false);
max_acceptable_trans = pnh.param<double>("max_acceptable_trans", 1.0);
max_acceptable_angle = pnh.param<double>("max_acceptable_angle", 1.0);关键函数:帧帧匹配函数
Eigen::Matrix4f matching(const ros::Time& stamp, const pcl::PointCloud<PointT>::ConstPtr& cloud)
输出即为输入点云相对关键帧点云的变换
/**
* @brief estimate the relative pose between an input cloud and a keyframe cloud
* @param stamp the timestamp of the input cloud
* @param cloud the input cloud
* @return the relative pose between the input cloud and the keyframe cloud
* 输出即为输入点云相对关键帧点云的变换
*/
Eigen::Matrix4f matching(const ros::Time& stamp, const pcl::PointCloud<PointT>::ConstPtr& cloud) {
if(!keyframe) { //如果关键帧点云不存在的话
prev_time = ros::Time();
prev_trans.setIdentity();
keyframe_pose.setIdentity();
keyframe_stamp = stamp;
keyframe = downsample(cloud);
registration->setInputTarget(keyframe); //参考帧,相当于地图
return Eigen::Matrix4f::Identity(); //初始时刻
}
//降采样之后
auto filtered = downsample(cloud);
registration->setInputSource(filtered); //插入当前帧
std::string msf_source;
Eigen::Isometry3f msf_delta = Eigen::Isometry3f::Identity();
if(private_nh.param<bool>("enable_imu_frontend", false)) {
if(msf_pose && msf_pose->header.stamp > keyframe_stamp && msf_pose_after_update && msf_pose_after_update->header.stamp > keyframe_stamp) {
Eigen::Isometry3d pose0 = pose2isometry(msf_pose_after_update->pose.pose);
Eigen::Isometry3d pose1 = pose2isometry(msf_pose->pose.pose);
Eigen::Isometry3d delta = pose0.inverse() * pose1;
msf_source = "imu";
msf_delta = delta.cast<float>();
} else {
std::cerr << "msf data is too old" << std::endl;
} //是否使用轮式里程计做初值 找到里程计和雷达之间的TF变换,将
} else if(private_nh.param<bool>("enable_robot_odometry_init_guess", false) && !prev_time.isZero()) {
tf::StampedTransform transform;
if(tf_listener.waitForTransform(cloud->header.frame_id, stamp, cloud->header.frame_id, prev_time, robot_odom_frame_id, ros::Duration(0))) {
tf_listener.lookupTransform(cloud->header.frame_id, stamp, cloud->header.frame_id, prev_time, robot_odom_frame_id, transform);
} else if(tf_listener.waitForTransform(cloud->header.frame_id, ros::Time(0), cloud->header.frame_id, prev_time, robot_odom_frame_id, ros::Duration(0))) {
tf_listener.lookupTransform(cloud->header.frame_id, ros::Time(0), cloud->header.frame_id, prev_time, robot_odom_frame_id, transform);
}
if(transform.stamp_.isZero()) {
NODELET_WARN_STREAM("failed to look up transform between " << cloud->header.frame_id << " and " << robot_odom_frame_id);
} else {
msf_source = "odometry";
msf_delta = tf2isometry(transform).cast<float>(); //里程计的变化只
}
}
pcl::PointCloud<PointT>::Ptr aligned(new pcl::PointCloud<PointT>());
//利用里程计的变化做配准的初值,提高收敛速度
registration->align(*aligned, prev_trans * msf_delta.matrix()); //相对于第一帧的变换,通过prev_trans * msf_delta.matrix()给初值
//
publish_scan_matching_status(stamp, cloud->header.frame_id, aligned, msf_source, msf_delta);
if(!registration->hasConverged()) { //
NODELET_INFO_STREAM("scan matching has not converged!!");
NODELET_INFO_STREAM("ignore this frame(" << stamp << ")");
return keyframe_pose * prev_trans; //如果没有收敛,则返回先前的位置,并提示
}
Eigen::Matrix4f trans = registration->getFinalTransformation();
Eigen::Matrix4f odom = keyframe_pose * trans; //最新的激光里程计 trans为当前帧相对于第一帧的位置
//
if(transform_thresholding) {
Eigen::Matrix4f delta = prev_trans.inverse() * trans; //此次激光配准的距离和角度变化量
double dx = delta.block<3, 1>(0, 3).norm(); //距离变换量
double da = std::acos(Eigen::Quaternionf(delta.block<3, 3>(0, 0)).w()); //角度离变换量
if(dx > max_acceptable_trans || da > max_acceptable_angle) {
NODELET_INFO_STREAM("too large transform!! " << dx << "[m] " << da << "[rad]");
NODELET_INFO_STREAM("ignore this frame(" << stamp << ")");
return keyframe_pose * prev_trans;
} //如果配准算出来的值差异太大,则放弃当前帧的数据,继续使用上一帧数据
}
prev_time = stamp;
prev_trans = trans;
auto keyframe_trans = matrix2transform(stamp, keyframe_pose, odom_frame_id, "keyframe");
keyframe_broadcaster.sendTransform(keyframe_trans);
double delta_trans = trans.block<3, 1>(0, 3).norm();
double delta_angle = std::acos(Eigen::Quaternionf(trans.block<3, 3>(0, 0)).w());
double delta_time = (stamp - keyframe_stamp).toSec();
//满足关键帧条件 keyframe_pose就是里程计的值
if(delta_trans > keyframe_delta_trans || delta_angle > keyframe_delta_angle || delta_time > keyframe_delta_time) {
keyframe = filtered;
registration->setInputTarget(keyframe);
keyframe_pose = odom;
keyframe_stamp = stamp;
prev_time = stamp;
prev_trans.setIdentity(); //prev_trans即为单位阵
}
//有订阅配准帧才会发布配准帧点云出来
if (aligned_points_pub.getNumSubscribers() > 0)
{
pcl::transformPointCloud (*cloud, *aligned, odom);
aligned->header.frame_id=odom_frame_id;
aligned_points_pub.publish(*aligned);
}
return odom;
}点云回调:
void cloud_callback(const sensor_msgs::PointCloud2ConstPtr& cloud_msg) {
if(!ros::ok()) {
return;
}
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>());
pcl::fromROSMsg(*cloud_msg, *cloud);
Eigen::Matrix4f pose = matching(cloud_msg->header.stamp, cloud);//得到相对关键帧的变换
//发布激光里程计和TF
publish_odometry(cloud_msg->header.stamp, cloud_msg->header.frame_id, pose);
// In offline estimation, point clouds until the published time will be supplied
//离线估计时
std_msgs::HeaderPtr read_until(new std_msgs::Header());
read_until->frame_id = points_topic;
read_until->stamp = cloud_msg->header.stamp + ros::Duration(1, 0);
read_until_pub.publish(read_until);
read_until->frame_id = "/filtered_points";
read_until_pub.publish(read_until);
}
发布帧匹配的状态:
包括有:帧匹配的frame_id、时间戳、配准得分、是否收敛
ScanMatchingStatus status;
status.header.frame_id = frame_id;
status.header.stamp = stamp;
status.has_converged = registration->hasConverged();
status.matching_error = registration->getFitnessScore();
获取内点得分:
int num_inliers = 0;
std::vector<int> k_indices;
std::vector<float> k_sq_dists;
for(int i=0; i<aligned->size(); i++) {
const auto& pt = aligned->at(i);
registration->getSearchMethodTarget()->nearestKSearch(pt, 1, k_indices, k_sq_dists);
if(k_sq_dists[0] < max_correspondence_dist * max_correspondence_dist) {
num_inliers++;
}
}地面检测
floor_detection_nodelet.cpp
该程序只依赖ros、pcl、boost
初始化:
virtual void onInit() {
NODELET_DEBUG("initializing floor_detection_nodelet...");
nh = getNodeHandle();
private_nh = getPrivateNodeHandle();
initialize_params();
//订阅/filtered_points点, 发布地板系数
points_sub = nh.subscribe("/filtered_points", 256, &FloorDetectionNodelet::cloud_callback, this);
floor_pub = nh.advertise<hdl_graph_slam::FloorCoeffs>("/floor_detection/floor_coeffs", 32);
read_until_pub = nh.advertise<std_msgs::Header>("/floor_detection/read_until", 32);
floor_filtered_pub = nh.advertise<sensor_msgs::PointCloud2>("/floor_detection/floor_filtered_points", 32);
floor_points_pub = nh.advertise<sensor_msgs::PointCloud2>("/floor_detection/floor_points", 32);
}
初始化参数:
void initialize_params() {
// approximate sensor tilt angle [deg] 传感器与水平面的近似倾角
tilt_deg = private_nh.param<double>("tilt_deg", 0.0);
// approximate sensor height [m] 雷达高度
sensor_height = private_nh.param<double>("sensor_height", 2.0);
// points with heights in [sensor_height - height_clip_range, sensor_height + height_clip_range] will be used for floor detection
//截取的高度范围
height_clip_range = private_nh.param<double>("height_clip_range", 1.0);
// minimum number of support points of RANSAC to accept a detected floor plane
//支持RANSAC提取平面所需要的最少的点数
floor_pts_thresh = private_nh.param<int>("floor_pts_thresh", 512);
// verticality check thresold for the detected floor plane [deg]
//检测地平面的水平角度阈值
floor_normal_thresh = private_nh.param<double>("floor_normal_thresh", 10.0);
// if true, points with "non-"vertical normals will be filtered before RANSAC
// 使用法线进行过滤
use_normal_filtering = private_nh.param<bool>("use_normal_filtering", true);
// "non-"verticality check threshold [deg]
//使用法线的阈值
normal_filter_thresh = private_nh.param<double>("normal_filter_thresh", 20.0);
points_topic = private_nh.param<std::string>("points_topic", "/velodyne_points");
}重要函数
boost::optional<Eigen::Vector4f> detect(const pcl::PointCloud<PointT>::Ptr& cloud) const()
boost::optional<Eigen::Vector4f> detect(const pcl::PointCloud<PointT>::Ptr& cloud) const {
// compensate the tilt rotation
Eigen::Matrix4f tilt_matrix = Eigen::Matrix4f::Identity();
//倾角补偿
tilt_matrix.topLeftCorner(3, 3) = Eigen::AngleAxisf(tilt_deg * M_PI / 180.0f, Eigen::Vector3f::UnitY()).toRotationMatrix();
// filtering before RANSAC (height and normal filtering)
pcl::PointCloud<PointT>::Ptr filtered(new pcl::PointCloud<PointT>);
pcl::transformPointCloud(*cloud, *filtered, tilt_matrix);
//将滤波处理后的点云转到倾角平面存放到filtered中,然后
//plane_clip 是通过点云索引提取点云子集
filtered = plane_clip(filtered, Eigen::Vector4f(0.0f, 0.0f, 1.0f, sensor_height + height_clip_range), false);
filtered = plane_clip(filtered, Eigen::Vector4f(0.0f, 0.0f, 1.0f, sensor_height - height_clip_range), true);
if(use_normal_filtering) { //使用法线滤波 滤除法线不垂直的点
filtered = normal_filtering(filtered);
}
pcl::transformPointCloud(*filtered, *filtered, static_cast<Eigen::Matrix4f>(tilt_matrix.inverse()));
if(floor_filtered_pub.getNumSubscribers()) { //讲过地面滤波之后的点云发布
filtered->header = cloud->header;
floor_filtered_pub.publish(*filtered);
}
// too few points for RANSAC 判断滤除的点是否有500个,如果少于这个数据就不做平面提取
if(filtered->size() < floor_pts_thresh) {
return boost::none;
}
// RANSAC 平面提取
pcl::SampleConsensusModelPlane<PointT>::Ptr model_p(new pcl::SampleConsensusModelPlane<PointT>(filtered));
pcl::RandomSampleConsensus<PointT> ransac(model_p);
ransac.setDistanceThreshold(0.1);
ransac.computeModel();
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
ransac.getInliers(inliers->indices);
// too few inliers 提取处理的点太少,则
if(inliers->indices.size() < floor_pts_thresh) {
return boost::none;
}
// verticality check of the detected floor's normal //参考轴为z方向经过倾角变换之后
Eigen::Vector4f reference = tilt_matrix.inverse() * Eigen::Vector4f::UnitZ();
Eigen::VectorXf coeffs;
ransac.getModelCoefficients(coeffs); //获取RANSAC平面的方向系数
double dot = coeffs.head<3>().dot(reference.head<3>());
//两个内积,即垂直投影的,因为其为单位向量,也就是两个向量的夹角
if(std::abs(dot) < std::cos(floor_normal_thresh * M_PI / 180.0)) {
// the normal is not vertical
return boost::none;
}
// make the normal upward
if(coeffs.head<3>().dot(Eigen::Vector3f::UnitZ()) < 0.0f) {
coeffs *= -1.0f; //如果算出来的向量方向与Z值正方向相反则将系数方向取反
}
if(floor_points_pub.getNumSubscribers()) {
pcl::PointCloud<PointT>::Ptr inlier_cloud(new pcl::PointCloud<PointT>);
pcl::ExtractIndices<PointT> extract;
extract.setInputCloud(filtered);
extract.setIndices(inliers);
extract.filter(*inlier_cloud);
inlier_cloud->header = cloud->header;
floor_points_pub.publish(*inlier_cloud);
}
return Eigen::Vector4f(coeffs);
}