目录
一、最短路径的基本概念
二、无权图单源最短路径
三、Dijkstra算法(正权图单源)
3.1、算法的基本步骤
3.2、算法的实现
3.3、习题思考
3.3.1、网络延迟时间
四、A*算法(正权图单源单目标点)
4.1、算法的基本概念
4.2、算法的重要证明
五、Floyd算法(带权每对顶点间的最短路)
5.1、算法的基本原理
5.2、算法的实现
5.3、扩展
六、Bellman-Ford算法(负权图单源最短路径问题)
6.1、算法的基本原理
6.2、算法的实现
七、SPFA(贝尔曼福特队列优化)
7.1、算法的基本思想
7.2、算法的实现
本篇所有证明都是博主自己想的,如有疑问,扔给GPT,他会帮你解答。
一、最短路径的基本概念
- 无权图:路径包含的边的条数。
- 带权图:路径包含的各边权值之和。
- 长度最小的路径称为最短路径,最短路径的长度也称为最短距离。
二、无权图单源最短路径
无权图单源最短路径使用BFS求出,时间复杂度为O(n+e)。该算法可以求出单源到所有顶点的最短路,并且可以通过静态链表的方式存储各顶点的最短路径信息。
在BFS访问的过程中,当访问某个顶点时,就确定了该点与源点的最短距离。
#include<bits/stdc++.h>
using namespace std;
#define n 10
struct Edge{
int VerName;
Edge * next;
};
struct Vertex{
int VerName;
Edge * edge=nullptr;
};
vector<int> path(n);
Vertex Head[n];
vector<int> dist(n,0x3f3f3f3f);
void BFS(Vertex * Head,int s){
dist[s]=0;path[s]=-1;
queue<int> q;
q.push(s);
while(!q.empty()) {
int pre=q.front();q.pop();
for(Edge * edge=Head[pre].edge;edge!=nullptr;edge=edge->next) {
int k=edge->VerName;
if(dist[k]==0x3f3f3f3f) {//未被访问过
dist[k]=dist[pre]+1;
q.push(k);
path[k]=pre;//记录该路径的前驱
}
}
}
return;
}
int main(void) {return 0;}三、Dijkstra算法(正权图单源)
虽然在关键路径中,我们使用过拓扑排序+动态规划求最长路径,时间复杂度是O(n+e)。但是这是在图存在拓扑排序时才能使用的。一般情况下的图更加复杂。一般情况下的正权图,可以使用迪杰斯特拉算法求出最短路径。迪杰斯特拉不能求带有负权图的最短路径。
Dijkstra算法可以求出单源点到所有点的最短路径。该算法使用优先队列可以优化成O(nlogn+e)。
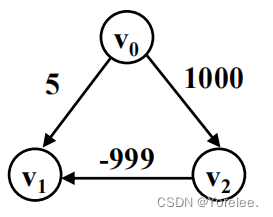
Dijkstra算法不能求负权图的原因是,即使当前在优先队列中选定了当前距离源点最短的一个点,此时确定它的最短路径,但是由于负权边的存在,可能使得未来,它到源点的最短距离更短。比如求v0到各点的最短路,下图中的v1会比v2先确定,且认为v1的最短路就是5,实际上应该是先选择v2,求得v1最短路是-1。如果仅仅存在正权,路径的权值只能增加不能减少,当前最小就是最小(贪心的局部最优),因此不会出现这样的情况。
3.1、算法的基本步骤
①将图中的所有顶点分成两个集合,一个是集合S,一个是集合V-S,S中的顶点表示已经确定最短路的顶点,V-S中表示尚未确定最短路的顶点。
②在初始时S为空集,将源点压入优先队列,执行③
③在V-S中选择离源点最近的顶点(包括源点自身),将该顶点放入S,表示该顶点已经求出最短路径,执行④
④遍历该顶点的所有边,更新其他顶点的最短路径,重复③,直至所有顶点都已经求出最短路径。
其主要思想是贪心。该算法实现时遍历所有顶点一次,遍历所有边一次,对于每一个顶点的所有边访问的顶点只要不在S中都压入优先队列中(延迟出栈,不修改队列中的元素,也可以直接自定义实现修改队列中的元素),可能重复压栈,因此时间复杂度为O(nloge+e)。由于e<=n^2 loge<=2logn,取最大阶,因此时间复杂度为O(nlogn+e)。
正确性证明:证明在S中的顶点的最短路一定被求出,在V-S中新选择的顶点其最短路一定已经被求出。
数学归纳法:令S中的元素个数为n
①当n=0时,选择源点,源点到源点必然是最短路。
②当n=1时,即源点更新最短路,在V-S中选择一步到源点的最短边对应的顶点v,也一定是v的最短路,因为从源点走其他一步的长度都比源点到v的路径更长,因此直接走到v必然是最短的,将其加入到S中,此时S中的元素都已经被求出最短路。
③当n=k-1时(k>=1),反证法:假设在V-S当前到源点的最短的距离顶点为v,假如目前该最短距离还不是源点到v的最短路,则必然有一条源点到v的路径经过一点u,使得源点到v的最短路距离更短(且u不在S中,不然u就已经更新过v了,就不存在这个u的说法了),由于最短路的性质,此时源点到u的最短路会更短,且u不在S中,所以应该选择的是u而不是v,因此与选择v矛盾,则目前该最短距离是v到源点的最短路,将其加入到S中,此时S中的元素都已经被求出最短路,证毕。
3.2、算法的实现
这里采用STL的优先队列的方法,优先队列采用延迟出栈,出栈的顶点若不在S中,则选择它,如果出栈的顶点在S中,则忽略该顶点,直至找到真正不在S中的顶点,多个副本在优先队列中是没问题的,因为多个副本距离最短的优先出队。出队防止队列为空!
这里直接通过距离来判断是否在S中:同样的距离仍然会被更新,但是不影响。
int n=100; vector<int> dist(n,0x3f3f3f3f); vector<int> path(n); void Dijkstra(Vertex * Head,int s){ priority_queue<pair<int,int>,vector<pair<int,int> >,greater<pair<int,int> > > q;//默认是大根堆,定义小根堆! {dist,k} 直接使用pair的比对函数,先比较dist,dist小者优先 q.push({0,s}); dist[s]=0;path[s]=-1; while(!q.empty()){//优先队列不为空继续遍历,如果已经遍历了所有顶点,循环内部也会解决该问题 int pre=q.top().second; int dis=q.top().first;q.pop(); if(dist[pre]<dis) continue;//优先队列中弹出的pre的最小值,应当是当前pre存储的最小值,才算是最小的,不是最小的出队。不能保证每个点只更新一次,但这样的多次更新对结果没影响 for(Edge * edge=Head[pre].edge;edge!=nullptr;edge=edge->next) { int k=edge->VerName; if(dist[k]<dist[pre]+edge->cost){//小时更新,等于时也不更新了。 path[k]=pre;//更新前驱 q.push({dist[k],k});//只有被更新了才导入,没被更新不是最优解就不导了 } } } return; }使用vector实现的,并使用“集合”的思想:
vector<int> S(n,0); while(!q.empty()){ int pre=q.top().second;q.pop(); if(S[pre]==1) continue;//pre在S中,即pre已经更新过则继续 S[pre]=1;//标记pre放入S并更新,保证每个点只更新一次了 for(auto i : Head[pre]) { int k=i.first; if(dist[pre]+i.second<dist[k]){//只有距离更短才放入,当然随着更新,可能同一个点多次放入,但是我们只在优先队列中选择一次,所以之后用S[pre]可以判断。 dist[k]=dist[pre]+i.second; q.push({dist[k],k}); } } }
3.3、习题思考
3.3.1、网络延迟时间
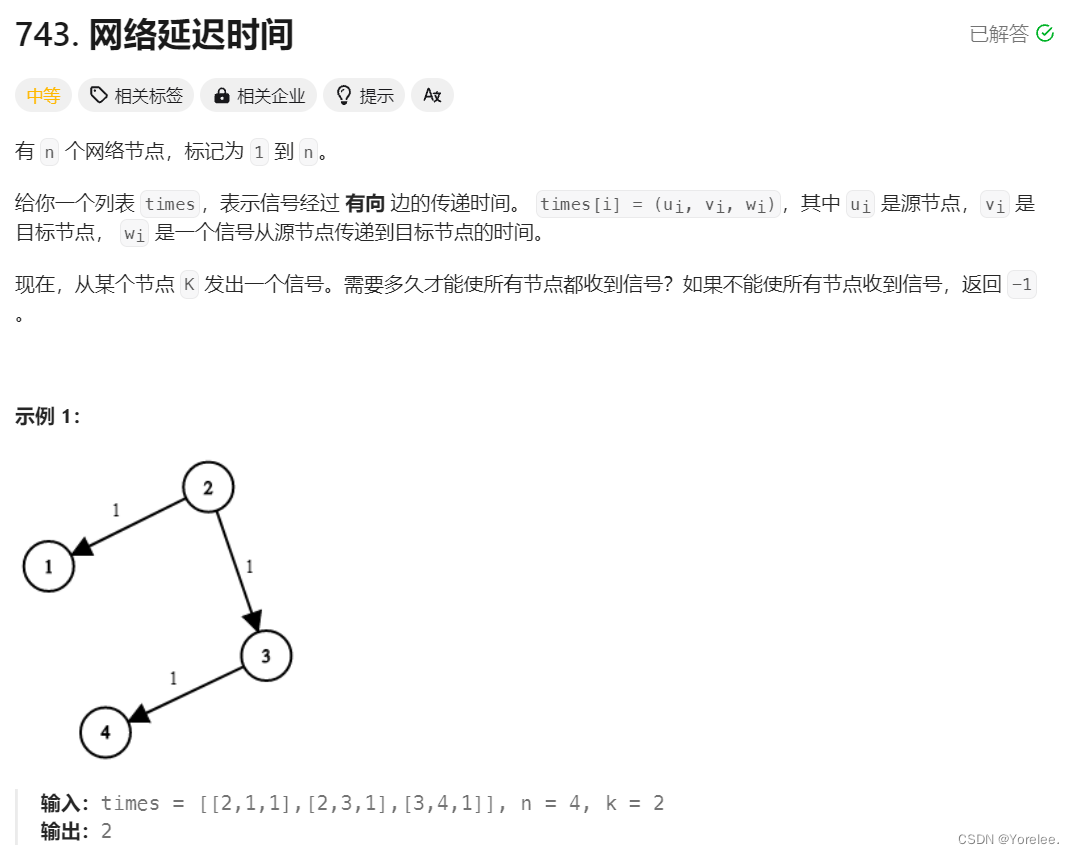
实际上由于STL的引入,存储边并不需要使用邻接表了,使用vector就能解决存储边的问题!以后我们都用vector存储边。
class Solution {
public:
const int INF=0x3f3f3f3f;
int Dijkstra(vector<vector<int>>& times, int n, int s) {
vector<vector<pair<int,int> > > Head(n);
for(auto &i:times){
Head[i[0]-1].emplace_back(i[1]-1,i[2]);
}
vector<int> dist(n,0x3f3f3f3f);
priority_queue<pair<int,int>,vector<pair<int,int> >,greater<pair<int,int> > > q;
q.push({0,s});
dist[s]=0;
while(!q.empty()){
int pre=q.top().second;
int dis=q.top().first;q.pop();
if(dist[pre]<dis) continue;//
for(auto i : Head[pre]) {
int k=i.first;
if(dist[pre]+i.second<dist[k]){
dist[k]=dist[pre]+i.second;
q.push({dist[k],k});//只有被更新了才导入,没被更新不是最优解就不导了
}
}
}
int max=-1;
for(auto i:dist) if(max<i) max=i;
if(max!=INF) return max;
return -1;
}
int networkDelayTime(vector<vector<int>>& times, int n, int k) {
return Dijkstra(times,n,k-1);
}
};四、A*算法(正权图单源单目标点)
4.1、算法的基本概念
【路径规划】全局路径规划算法——A*算法(含python实现 | c++实现)
-
在游戏中,如《新倩女幽魂》里的自动寻路功能,通常采用路径规划算法来计算从当前位置到目标位置的最佳路径。这种路径规划可能会涉及到各种算法,如A*(A-Star)、Dijkstra等,这些算法在寻找最短路径的同时,也会考虑其他因素,如路径上的障碍、地形的不同代价以及可能的动态变化等。
-
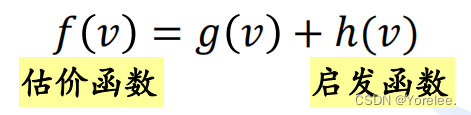
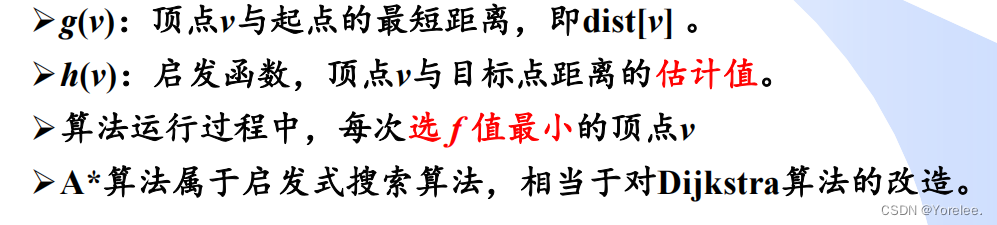
A*算法是一种启发式搜索,它每次选择估价函数最小的顶点进行下一步移动。
-
A*算法的执行步骤和Dijkstra算法很相似,区别就是A*算法每次选择的不是 没被选择过的里面距离源点最短的顶点更新,而是选择没被选择过的里面 估价函数最低的顶点更新。
-
估价函数f(v) 包含了dijkstra里面距离源点的最短路径g(v),还多出来了h(v)。并且我们更新的最短路实际上也是更新的g(v),只是在选择更新时选择了f(v)而已,选择f(v)可以让算法更快抵达目标点。
4.2、算法的重要证明
-
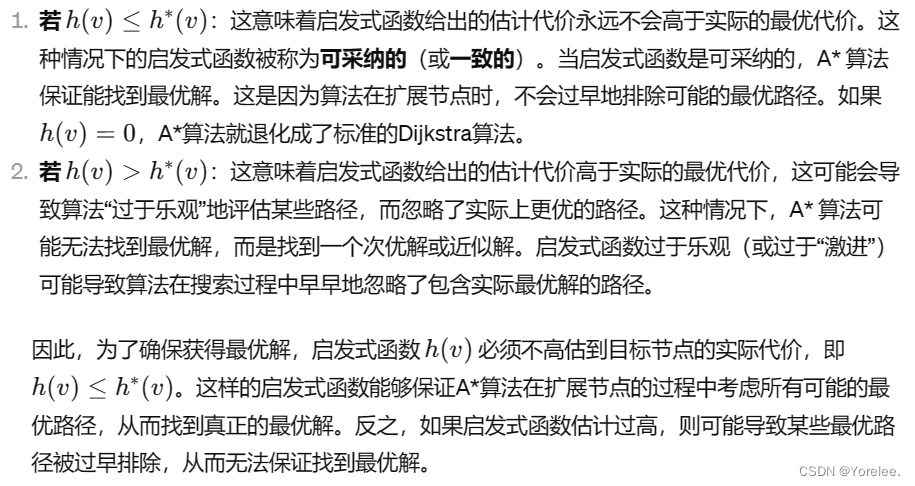
当保证h(v)<=h*(v)时,我们根据之前的阐述可以发现,最短路的顶点是可能被选到的,因为h(v)==h*(v)时,最短路径上的顶点f(v)总是最小的,当h(v)不超过实际代价时,最短路径上的顶点f(v)也大概率会比其他顶点小,因此会优先被更新。并且对于一些顶点到源点的距离g(v)就可能已经超过了最短路径上的f(v),因此不会再被更新。
-
证明启发函数小时能找到最短路:A* 算法的一个核心停止条件是当目标节点被移动到关闭列表(已经被更新过)时,此时算法认为已经找到了一条路径,并且基于启发式函数的设定,认为这是最优路径。如果h(v)>h*(v),那么最优路径的顶点可能在优先队列中靠后,导致更新不及时,最终到达终点,找到近似解,当然也可能找到最优解。而如果h(v)<=h*(v),则在终点更新扩展时,终点的估价函数等于f0,而最短路径上的估价函数等于f(v)=g(v)+h(v)<=g(v)+h*(v)<=f0,而若终点未被最短路径上的顶点更新,那么其f必然是大于f0的(因为g(v)更大,h(v)=0),因此最短路径上的顶点会比终点先扩展,g(v)是唯一确定的,扩展后终点的g(v)也会被确定为最短。这意味着,对于最短路径上的任一节点 v,f(v)≤f0,确保了在目标节点的 f0 值被确定之前,最短路径上的所有节点都已被考虑。这是因为 A* 算法总是优先扩展 f 值最小的节点。
-
-
-

-

解释:
五、Floyd算法(带权每对顶点间的最短路)
带权每对顶点间的最短路:
①如果全是正权,可以让每个顶点都做一次源点,执行n次Dijkstra算法,时间复杂度为O(n²logn)
②带有负权,也可以使用Floyd算法,时间复杂度为O(n³)
5.1、算法的基本原理
Floyd算法实际上是一个动态规划算法,它定义dp[k][i][j],表示能经过顶点0~k时,i到j的最短路。
状态转移方程:dp[k][i][j]=min(dp[k-1][i][j],dp[k-1][i][k]+dp[k-1][k][j]),即经过顶点0~k时,i到j的最短路 等于 {经过顶点0~k-1时,i到j的最短路,可以经过顶点0~k-1时,i先经过k,再从k到j的距离}的最小值。
降维优化,由于只用到之前的距离,因此可以直接将三维数组改写成二维dp[i][j]=min(dp[i][j],dp[i][k]+dp[k][j])。//我们不需要担心i==k||j==k时,更新它是会影响之后的更新情况,不用担心,因为k能经过k 和k能经过0~k-1是没区别的。
不允许存在负环(环上所有边的权值和为负数,理论上不存在最短路,因为可以无限小,Floyd此时求不出最短路)。Floyd算法可以判负环,初始时D[i][i]=0,算法执行过程中若D[i][i]<0,表示顶点i到自己的最短距离为负值,即存在负环。(可以这样考虑为什么不允许存在负环,初始化时,你将dp[i][i]初始化为0,表示自己到自己应该是0距离,而实际上存在负环,可以是负无穷,因此即使算法没逻辑问题,但是初始化就导致算法结果出现问题)
5.2、算法的实现
int A[n][n];
vector<vector<int> >dp(n,vector<int>(n,0));
vector<vector<int> >path(n,vector<int>(n,0));
void Floyd(int n){
for(int i=0;i<n;++i)
for(int j=0;j<n;++j){
dp[i][j]=A[i][j];
if(i!=j)
path[i][j]=i;//表示i到j的最短路 j 的前驱
else path[i][j]=-1;
}
for(int k=0;k<n;++k)
for(int i=0;i<n;++i)
for(int j=0;j<n;++j)
if(dp[i][j]>dp[i][k]+dp[k][j]){
dp[i][j]=dp[i][k]+dp[k][j];
path[i][j]=path[k][j];//i到j的最短路前驱变成了k到j的最短路前驱。
}
return;
}5.3、扩展
不经过 v1,v2,v3,v4··的最短路(不存在v1,v2,v3,v4··为中间顶点时),我们直接让k不能等于它们即可。
for(int k=0;k<n;++k) if(k!=v1&&k!=v2&&k!=v3&&k!=v4)//使得k不能作为中间结点~ for(int i=0;i<n;++i) for(int j=0;j<n;++j) if(dp[i][j]>dp[i][k]+dp[k][j]){ dp[i][j]=dp[i][k]+dp[k][j]; path[i][j]=path[k][j];//i到j的最短路前驱变成了k到j的最短路前驱。 }
六、Bellman-Ford算法(负权图单源最短路径问题)
6.1、算法的基本原理
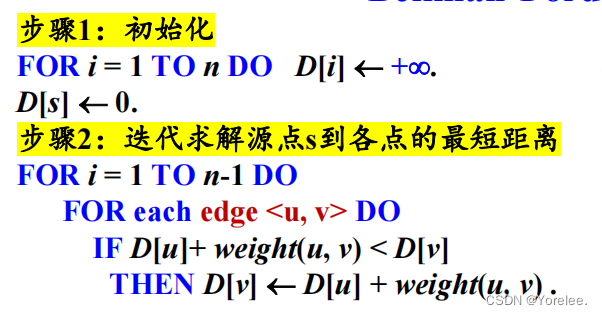
先看一下是什么:
再来说说为什么:
我们可以将源点到所有顶点的所有可能路径展开(类似一个散射图),不管重不重复出现,将所有可能的路径都向外展开就行。这样,我们将所有的可能路径都分开了,每一条单独而不影响!
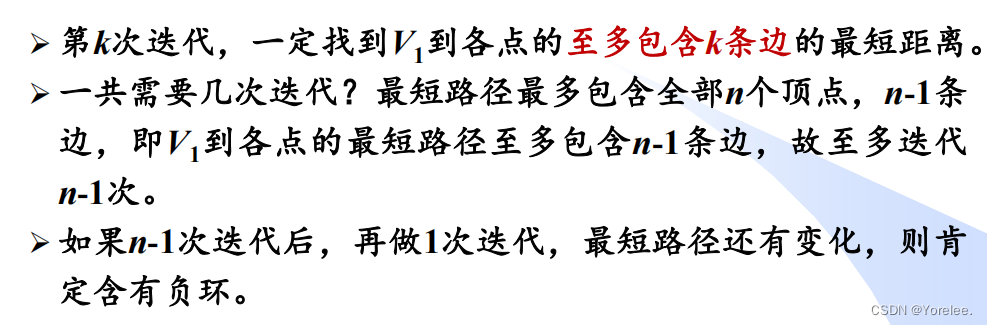
我们再来看算法,当算法第1次迭代时,必定只有离原点只有一条边的顶点的距离被更新,第2次迭代时才可以更新离源点有两条边的顶点,依次类推。那么,我们是如何找到最短路的?对于同一个顶点v,可能出现在我们刚刚展开的图中两条(或多条)路径中,我们来证明一下v最短路径那条路径(包含e条边)一定会在e次迭代后被成功更新,即第e次一定会迭代出v的最短路径长度。假设v的最短路径包含e条边,且前驱是u,根据最短路的性质,源点到u也应该是最短路,若不然,u的最短路在另外一条路径中的长度应该更长(至少包含e条边,因为本条路径对于u来说到源点一共e-1条边),因为u还未被更新为最短路,一旦被更新为最短路,则u的最短值不可能被更改,所以u如果在v的该路中不是最短路,则u应该会更长,这与v的前驱是u,且最短路包含e条边矛盾,因为u可以更短且包含更多的边,则v的前驱有u,则v也可以包含更多的边而不是e,与之前矛盾,所以u确实是v的最短路。证毕。
再来看看更容易的证明:
最优子结构的存在,对于v的最短路来说,源点到v之前的所有顶点都必然是自己的最短路,这样的话,v的最短路e条边,实际上迭代e次必然就出现了~(因为迭代e次相当于只能往外走e次,并且一旦被更新为最短路,则最短值不可能被更改)。
最优子结构是因为,源点到v的最短路经过x,那么源点到x也必然是最短路,因为v的最短路=<源点,u,x>+<x,,v),如果<源点,u,x> 不是x的最短路,那么换一个最短的,v还能短,所以v最短必然x也最短~()


6.2、算法的实现
不存储边:时间复杂度O(n²+ne)<=O(n³),注意,虽然最坏也是n³,但是Floyd可以求两两之间的最短路~
vector<int> path(n,-1);
vector<int> dist(n,0x3f3f3f3f);
bool Bellman_Ford(vector<vector<pair<int,int> > > & g,int n,int s){
dist[s]=0;
for(int k=1;k<n;++k)//只需要迭代n-1次 就行~
for(int i=0;i<g.size();++i)
for(int j=0;j<g[i].size();++j)
if(dist[i]+g[i][j].second<dist[j]){
dist[j]=dist[i]+g[i][j].second;
path[j]=i;
}
for(int i=0;i<g.size();++i)//检测负环
for(int j=0;j<g[i].size();++j)
if(dist[i]+g[i][j].second<dist[j]){//还能更新,存在负环!
return false;
}
return true;
}存储边:时间复杂度O(n+ne)<=O(n³)
vector<int> path(n,-1); vector<int> dist(n,INT_MAX); bool Bellman_Ford(vector<vector<pair<int,int> > > & g,int n,int s){ vector<pair<int,pair<int,int> > > edge; for(int i=0;i<g.size();++i) for(auto &j:g[i]) edge.push_back({i,j}); dist[s]=0; for(int k=1;k<n;++k)//只需要迭代n-1次 就行~ for(auto & i:edge) if(dist[i.first]+i.second.second<dist[i.second.first]){ dist[i.second.first]=dist[i.first]+i.second.second; path[i.second.first]=i.first; } for(auto & i:edge)//检测负环 if(dist[i.first]+i.second.second<dist[i.second.first]){ return false; } return true; }
七、SPFA(贝尔曼福特队列优化)
SPFA实际上是贝尔曼福特算法的队列优化版本。
SPFA存在卡时,如网格图可以将SPFA卡成O(ne)。

7.1、算法的基本思想

SPFA和Bellman-Ford算法的区别在于,SPFA每次迭代并不遍历所有边,因为可能有些边的遍历是多余的,比如第k-1次遍历,没有更新dist[u],且第k-1次遍历会遍历尝试更新u邻接的所有顶点的dist,则第k次遍历 用上一次一样的dist[u]继续更新是没有意义的。
因此我们使用的方法的核心思想仍然是迭代次数 遍历边,但是我们只遍历这次迭代被更新顶点的边:我们使用一个队列保存需要用来更新的顶点,用该顶点更新其邻居,当其邻居的dist被更新了,则将其邻居入队,相当于下一次迭代我们只需要遍历这些被更新的邻居即可,由于队列是先进先出的,我们直接不断取出不断弹出直到队列为空即可。这里我们还可以优化一部分,就是如果在队列中的顶点就不需要继续入队,因为一个点v 更新其邻接顶点 使用越接近最短距离的越好;可能在“本次迭代”更新的时候,压入了一个顶点u,然后之后的某一次这个顶点u还没出队,又更新了这个顶点u,这个顶点u如果在队列中我们就不需要压入了,原因是即使是不压入,u也确实被更新了,它仍然会带着这个被更新的值 继续用最好的dist去更新。(这和dijkstra不一样, SPFA队列中是点 不是值 值在外部)
入队次数等于n说明个什么问题?
由于SPFA相当于Bellman-Ford算法的优化,实际上也是一个迭代过程,如果我们保证每次迭代队列中的元素只入队一次的话。也就是说可以想象成队列中的元素是按迭代次序摆放的且分开的,下一次迭代的元素会在本次被压入队列中,因此近似地入队次数可以被认为是一个顶点的迭代次数。准确的说,入队次数是≤Bellman-ford的迭代次数的,因为第k次迭代更新的 顶点的结果 应该在k+1次迭代中使用并进行更新其邻接顶点,但是可能在第k次迭代被更新时,此时还没出队,即它也将进行第k次迭代,则它不会再被入队,因此也不会参与第k+1次迭代了,即第k+1次不会更新该顶点的邻居,所以入队次数少于等于实际的迭代次数的,如果此时入队次数达到了n则至少在Bellman-Ford算法中的迭代次数达到了n,负权环的存在可以使得更新产生无数次,入队次数也可以无数次。
如果入队次数等于n说明一个顶点在不同的路径中存在着n个不同的位置,否则根据Bellman-Ford算法的思想,它不能被迭代n次!而不存在负环的图,n个顶点,任何一个顶点最多出现在一条路的n-1个不同的位置,因此如果有n个位置就说明存在负环,路径可以无限长。
7.2、算法的实现
bool SPFA(vector<vector<pair<int,int>>> &g,int n,int s){
vector<int> path(n,-1);
vector<int> times(n,0);//入队次数
queue<int> q;
vector<int> dist(n,INT_MAX);
vector<int> Inqueue(n,0);
dist[s]=0;
q.push(s);times[s]+=1;
while(!q.empty()){
int u=q.front();q.pop();
Inqueue[u]=0;
for(auto &i:g[u]){
int v=i.first;int weight=i.second;
if(dist[u]+weight<dist[v]){
dist[v]=dist[u]+weight;
path[v]=u;
if(Inqueue[v]==0){
Inqueue[v]=1;
q.push(v);
if(++times[v]==n) return false;//一次迭代只算一次入队哦
}
}
}
}
return true;
}