1 背景
在之前的几篇文章中,不管是通过构建SL图《自动驾驶---Motion Planning之Path Boundary》,ST图《自动驾驶---Motion Planning之Speed Boundary》,又或者是构建SLT图《自动驾驶---Motion Planning之构建SLT Driving Corridor》,最终我们都是为了得到boundary的信息。
构造优化问题求解的前提:首先确定问题的代价函数,有初值,有边界(约束),然后进行求解。笔者会先阐述Apollo中轨迹横纵向优化的问题,接下来会在后面的博客中继续讲解STSC中的轨迹优化问题。
2 轨迹横向优化
总体流程图以车道保持场景为例子进行说明。task的主要功能位于Process()函数中。规划模块的运动总体流程图如下:
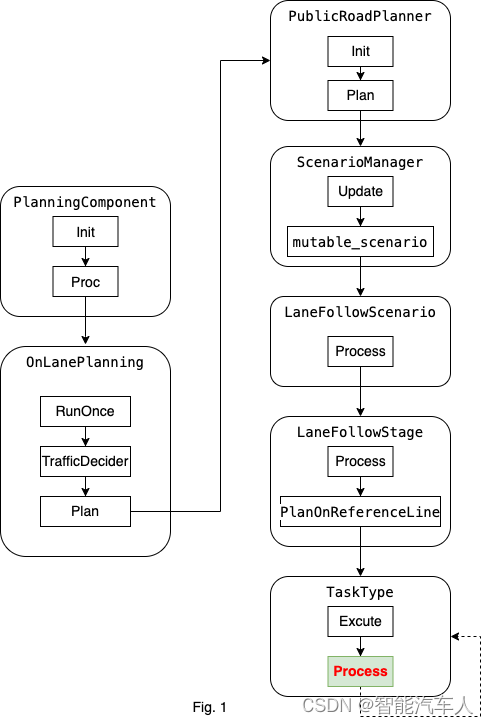
首先有一点值得注意:在Apollo中,横纵向的优化求解是解耦开的,因此在横纵向分别需要求解一次,最终得到得到横纵向的轨迹信息(s,s',s'',l,l',l'')------这里的 是
关于
的一阶导数,
是
关于
的一阶导数。
整体轨迹优化器的代码位于/apollo/modules/planning/tasks/optimizers。

见到下图,看过笔者之前的博客《自动驾驶---Motion Planning之参考线Path平滑》就非常熟悉了,之前在参考线平滑中详细讲解了这部分的内容。
但是这次与参考线平滑不同的是:代价函数的定义。本篇博客主要讲解横向Path的优化过程,在下一篇为读者讲解纵向Speed的优化过程。
二次规划问题的形式:
其中是由二阶导构成的Hessian矩阵,
是由梯度构成的Jacobi矩阵;然后包括m个等式约束集合和n个不等约束集合。
Path优化问题的自变量为:。
2.1.1 优化目标
优化目标中主要考虑了:1)横向位移 ;2)横向速度;3)横向加速度;4)横向Jerk;5)障碍物的距离。
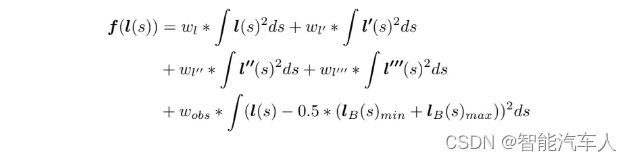
(注意:论文这里的代价函数与Apollo源码中有些差异,源码中没有考虑障碍物,而是增加了更接近参考点的代价以及终点的代价)
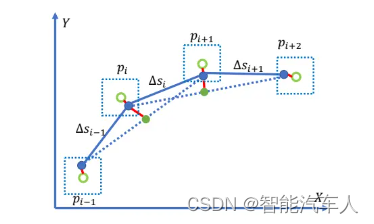
这里提到了一个概念:分段加加速度。为了有效地制定优化问题并在实践中评估约束满意度,论文中根据空间参数 将路径函数
离散到一定的分辨率
,并使用这些离散点来控制路径的形状,并近似地评估约束满意度。关键思想是将一维函数离散到二阶导数,并使用常数的三阶导数项来“连接”连续的离散点。位置变量的三阶