附件下载
联系工作人员获取附件
在本文中,我们将了解如何根据激光雷达应用需求设计和优化相控阵光栅天线。
概述
激光雷达(LIDAR)是“light detection and ranging”的简称,近年来由于在机器人、自动驾驶汽车、高精度测绘等领域的快速应用而备受关注。由于具有高角度分辨率和很快的转向速度,目前最先进的激光雷达能够实现每秒对数百万个点进行测距。现有激光雷达架构中的光束转向机制通常分为两类:机械式(如基于旋转或 MEMS 的实现)和非机械式(最常见的是光学相控阵)。基于硅光子技术的光学相控阵具有大光学孔径和紧凑的占地面积,被认为是低成本、高速、坚固耐用的固态激光雷达的理想解决方案。在本示例中,我们展示了如何设计可同时用于发射和接收的集成光学相控阵天线,过程包括从单个天线元件的设计到相控阵的整体优化。最后,我们将展示如何INTERCONNECT中建立相控阵天线的紧凑模型,以便对激光雷达系统进行更大规模的仿真。
要了解整个激光雷达系统的工作原理,请参阅后文集成激光雷达系统概述 。
本示例的大部分内容是与Cadence Design Systems 和MathWorks合作开发的“更全面的激光雷达”研讨会的一部分,我们对他们的贡献表示感谢,特别是来自MathWorks的Rick Gentile,他开发了步骤3的大部分内容:使用MATLAB进行设计优化。
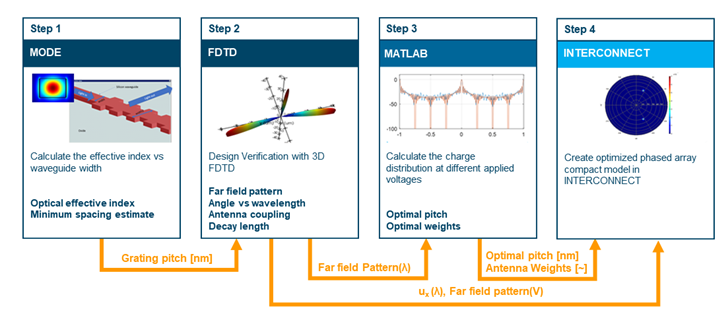
我们使用MODE的FDE求解器创建初始天线设计,使用3D FDTD验证设计,并提取天线参数,使用MATLAB的天线阵列和全局优化工具箱优化相控阵。最后,我们使用INTERCONNECT创建了一个紧凑模型。
步骤1:使用FDE求解器进行初始设计
使用FDE求解器计算波导有效折射率(neff),它是与波导宽度相关的函数。也将选择光栅宽度和占空比。确定光栅波导的平均有效折射率,寻找避开波导光栅带隙的近正常发射所需的工作点,并以此为基础选择光栅间距。考虑直波导之间的频散耦合,估算可使用的最小波导间距。
步骤2:利用 3D FDTD 进行设计验证和参数提取
使用3D FDTD进行模拟,验证带隙和工作点是否符合预期。确定光栅的衰减长度。验证步骤1中估计的最小天线间距是否正确。提取远场辐射模式作为波长和其他参数的函数,以便后续在MATLAB和INTERCONNECT中使用。假设天线加权均匀的前提下,计算波束远场。
步骤3:使用 MATLAB 进行设计优化
在这一步中,我们将使用MATLAB来加载步骤2中计算的角度分布数据,并将波束可视化。优化天线权重和天线间距。分析制造缺陷造成的扰动对天线性能的影响。
步骤4:INTERCONNECT 中的相控阵紧凑模型
使用步骤2和3中确定的参数来更新INTERCONNECT中的天线阵列紧凑模型。运行测试仿真,绘制波束极角和方位角随时间变化的曲线。
运行和结果
模型运行说明和主要结果讨论
步骤 1:使用 FDE 求解器进行初始设计
初始模拟
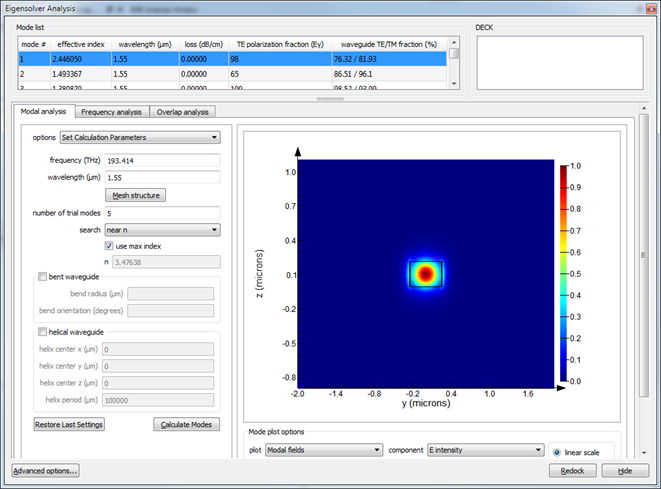
1.在 MODE 中打开 LIDAR1.lms。
2.按 "运行 "按钮运行特征模态求解器。
这将弹出 "Eigensolver 分析窗口"(您可能需要解锁该窗口以将其放大),您可以按下 "计算模 式 "按钮。您将在 Eigensolver 分析窗口中看到如下所示的模式列表和相应的模式剖面图:
确定有效指数 (n eff ) 与波导宽度的关系
1.切换回布局模式。布局按钮位于 "运行 "按钮的位置:
2.打开"Optimization and sweeps"窗口,右键单击名为neff_vs_width的扫描项,然后选择"运行"。这将启动8项计算,在单独的进程中计算neff与宽度的函数关系。(如果找不到 "优化和扫描 "窗口,请用鼠标右键单击上部菜单栏,确保选中该窗口)。
模拟完成后,再次右击neff_vs_width,选择可视化neff。您将看到这条曲线:
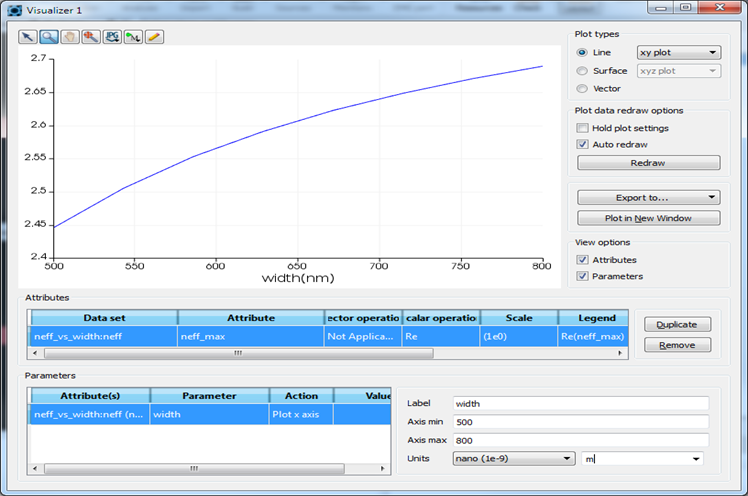
上述曲线可用于高级设计,例如在光栅长度范围内调整光栅周期,以确保在固定角度下天线长度范围内的均匀发射,如 Poulton 等人所做的那样。
确定光栅的平均neff
我们假设光栅的占空比为 50%,宽度在500nm和800nm之间变化。这样我们就可以估算出每个单元格的平均n效率为

估算最小天线间距
我们可以使用特征模求解器估算最小天线间距,然后使用FDTD验证结果。
1.切换到布局模式
2.编辑波导天线,选择Ny=2
3.在"Optimization and sweeps"窗口中,同时运行"proximity_thin sweep"和"proximity_thick sweep"。
两个直波导之间的功率耦合可以通过对称混合模式和反对称混合模式的有效指数差来确定,我们将其称为Δneff。如果位于波导1中的初始功率为P0,经过一个长度L后,波导2中的功率为:
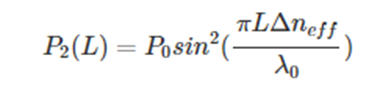
配置FDE::data对象是为了计算Δneff和L10,即10%的功率从波导1耦合到波导2所需的长度。
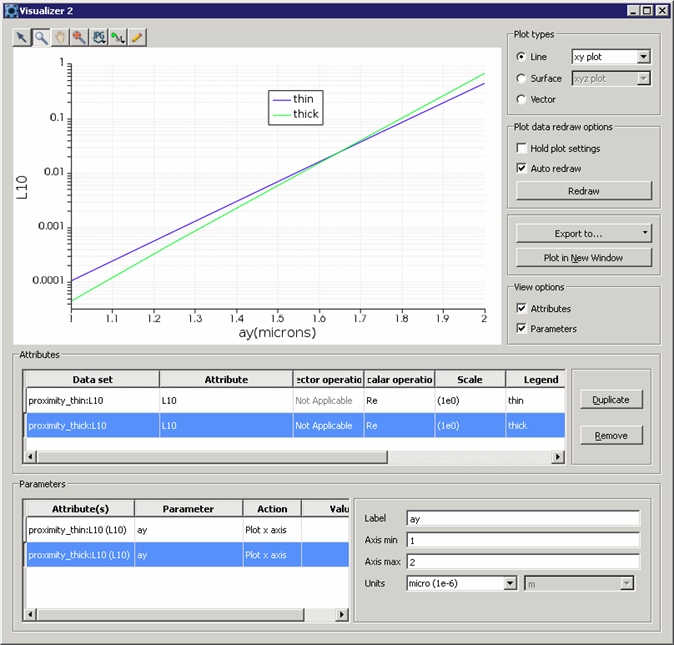
根据这一估算,我们可以看到,在1.5um处,至少需要6mm的传播长度,才能将10%的光耦合到波导中。这显然过于简单化了,因为光栅的设计目的是散射光线,这可能会增加波导之间的耦合。但这还是让我们对最小天线间距有了一个很好的概念,这可以通过3D FDTD进行验证。在这一点上,我们假定天线间距可以达到1.5um,即大约一个自由空间波长。
选择所需的发射角度
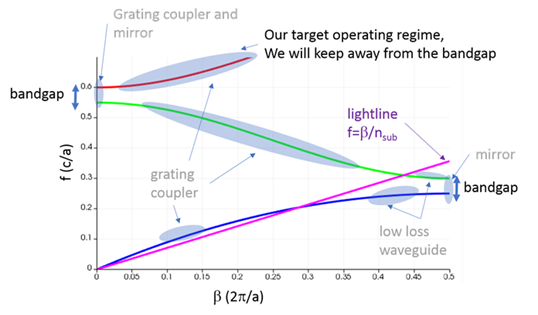
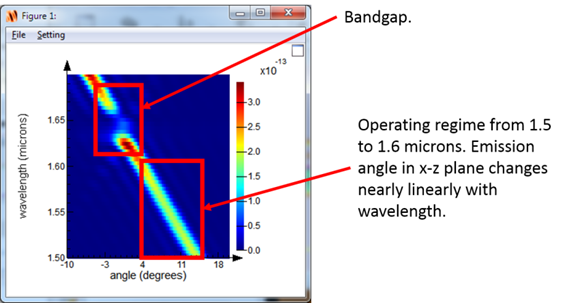
以正常入射角为发射角似乎是比较理想的选择。然而,这并不能达到理想的效果,因为正向和反向传播的光都会在正常入射角发射。事实上,当发射角度接近法线时,光栅会对前向和后向传播的光产生强大的耦合作用,从而产生一个禁止光频率的带隙,因此光栅既是一个镜面,也是一个光栅耦合器。这给设计带来了挑战:光在光栅中的穿透力随波长的变化而迅速改变。下面的波段图解释了周期性图案波导的不同状态。然而,在带隙附近(但不在带隙内)工作是最理想的,因为我们可以实现接近正常的发射角,而且角度随波长的变化是最大的。
虽然可以用FDTD计算带状结构,但我们将采用一些简单的假设来计算间距。我们的目标工作波长为1500nm到1600nm。因此,我们将尝试把带隙(其中θ=0,m=1)设在λ0=1700nm处。这样我们就可以得到:

这是一个近似值,部分原因是我们使用了在1550nm波长下计算的neff。为了自洽,我们应该重新计算1700nm波长下的neff,但我们也可以通过FDTD来验证带隙的位置。
步骤 2:利用 3D FDTD 进行设计验证和参数提取
带隙位置
1.打开 FDTD 和文件 LIDAR2.fsp。编辑光源属性,确保波长范围为 1500nm 至 1700nm。运行模拟。
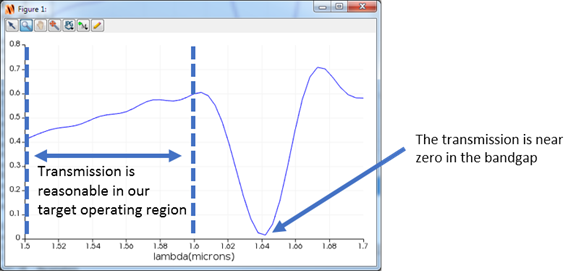
右键单击 waveguide_analysis::T1,绘制输出端的传输图。我们可以看到如下图所示,带隙约为 1640 nm,超出了我们的目标范围 1500 至 1600 nm。
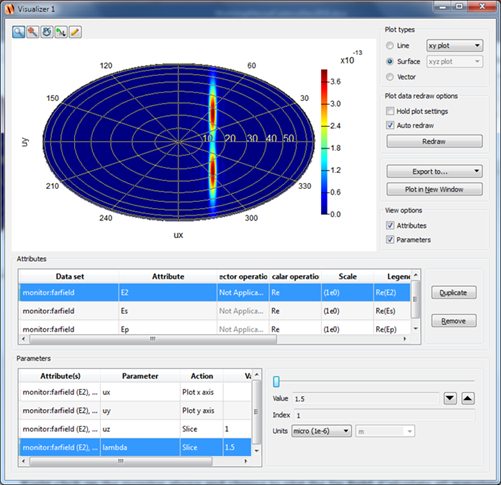
右键单击上面的显示器,选择绘制远场。计算所有波长。查看光束如何随波长移动。
绘制上述监视器中的电场强度图,可以看到在模拟区域结束时,电场还没有完全衰减(这就是为什么透射率仍高于 40% 左右的原因):

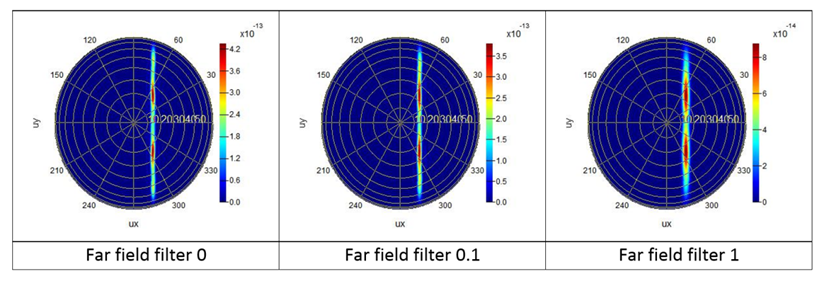
通常情况下,要进行远场投影,我们需要目标场在模拟区域边缘(或记录场的显示器边缘)就已完全衰减,否则远场结果中会出现非物理波纹。为了避免这种情况,我们可以通过将 "远场滤波器 "设置为非零值来使用一种称为远场光栅化的方法。使用这种方法时,近场将通过与上扬余弦窗函数相乘的方式进行过滤。
下表显示了一些结果差异。我们将在最终分析中使用 0.1 的远场滤波器设置。
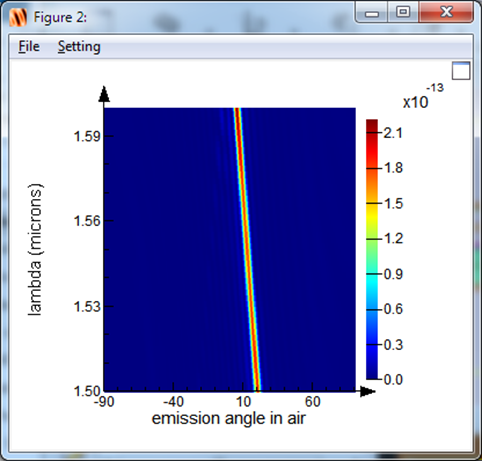
显示远场强度与角度(x-z 平面)和波长的函数关系
脚本文件 plot_farfield1.lsf 将绘制远场与 x-z 平面角度的函数关系图。请注意带隙(零度)内的低发射率和带边(接近零度)附近的高透射率。不过,我们将在 1500nm 到 1600nm 波长范围内工作,这里的发射角(在玻璃中)大约在 4 到 13 度之间变化。在空气中,根据斯涅尔定律计算,这相当于约 5.8 至 20.4 度。
最小天线间距和衰减长度
我们可以验证之前使用特征模式求解器估算出的 1.5 um最小天线间距。此外,我们还可以计算衰减长度。
1.切换到布局模式
2.编辑信号源,并将波长重新设置为 1500 nm到 1600 nm之间
3.重新运行模拟
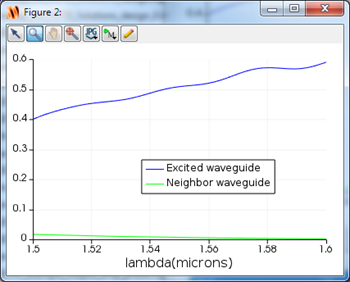
在同一条曲线上绘制来自监控器 waveguide_analysis::T1 和 waveguide_analysis::T2 的传输图(选择这两条曲线并右键单击 "可视化")。您将看到:
绘制衰减长度和耦合到波导 2 (P2) 的功率,这些数据是在波导分析组中计算得出的。
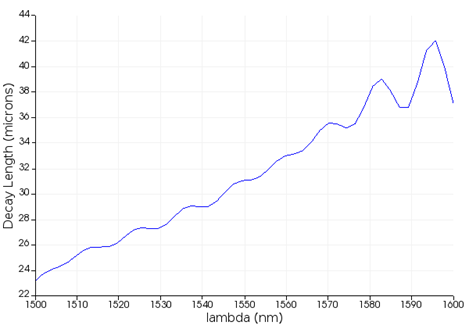
正如所料,相隔 1.5 um的波导之间的耦合比特征模求解器预测的要强。不过,衰减长度很短(小于 40 um),而且我们可以从 P2 的图像中看到,耦合到邻近天线的功率从未超过初始功率的 2%,因此我们显然可以使用小至 1.5 um的间距。
使用名为 trans_box 的传输盒查看功率流向。同时,通过绘制 trans_box::T,验证总功率在所有波长上都接近于 1。请注意,在带隙波长处会出现一些波纹--这是因为光速在带隙附近减慢,模拟结束时仍有一些光滞留在模拟中(左图)。如果希望获得更高的精度,就必须增加模拟运行时间。例如,如果最长模拟时间为 1000fs,而不是 600fs,trans_box::T 的结果就会显示在更长波长处的凹陷明显减小(右图)。

提取角度分布与波长数据,用于 Matlab 优化和 INTERCONNECT 紧凑型模型
1.打开并运行脚本文件 LIDAR2_analysis.lsf。
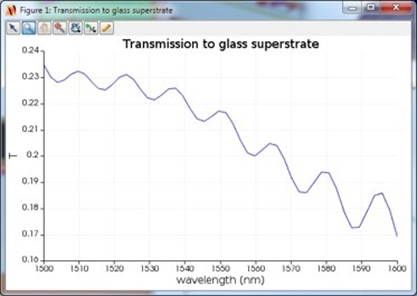
脚本将生成一系列结果。它将计算并使用上述探测器的结果绘制玻璃基板的归一化透射率图像:
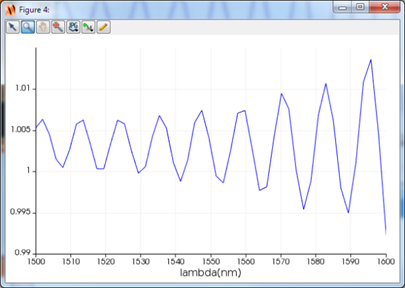
它将对远场投影应用斯涅尔定律来计算空气中的角发射。然后绘制出 x-z 平面上的发射角与波长的对比图:
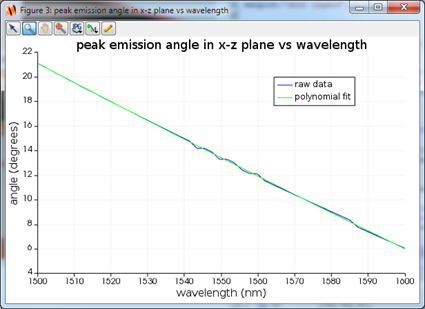
它从上述曲线中提取数据,以确定 x-z 平面上峰值发射角的正弦值(称为 ux_peak)。然后将其与二阶多项式拟合,创建一个脚本命令,用于快速计算峰值发射角(和宽度)与 INTERCONNECT 紧凑型模型中波长的函数关系。它还能绘制出如下曲线:
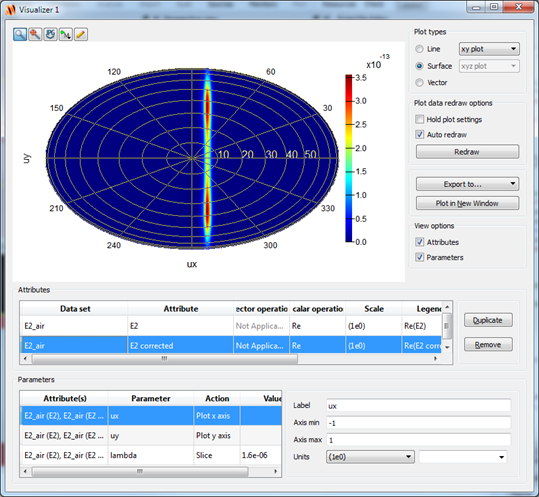
它创建了一个可视化工具,其中包含两个数据集,分别代表计算得出的空气电场强度和根据有限模拟长度校正的远场强度。这其中将远场乘以了一个考虑到衰减长度的洛伦兹系数。这使得发射角的范围比原始 FDTD 结果更窄。
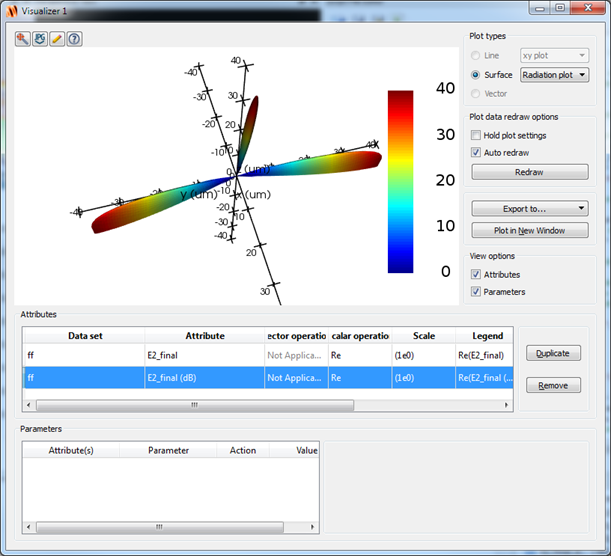
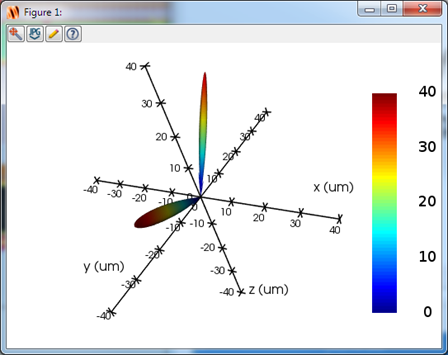
该脚本文件可创建非结构化数据集,以便在三维视图中将数据可视化,还可绘制辐射图:
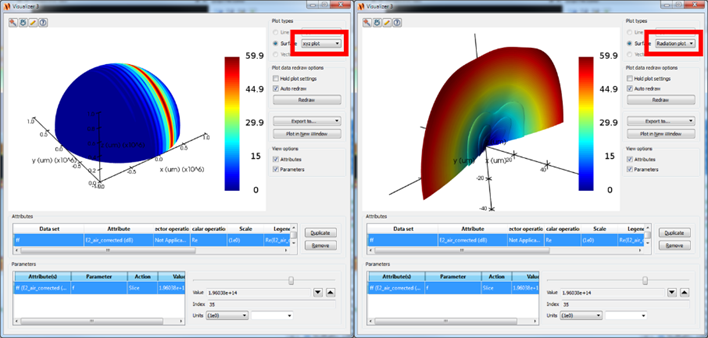
辐射数据的角度分布被保存到一个名为 antenna_array_lumerical.ldf 的文件中,用于后续的相控阵分析,以及随后在 INTERCONNECT 紧凑型模型中使用。最后,脚本将数据插值到球面坐标上(极角 theta,方位角 phi),以便随后在 MATLAB 中工作。数据直接保存到名为 antenna_data.mat 的 *.mat 文件中。
初始相控阵分析
1.打开脚本文件 phased_array_analysis.lsf。
2.如有需要,修改参数值。
3.运行脚本。
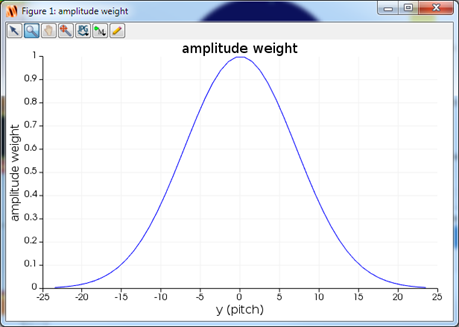
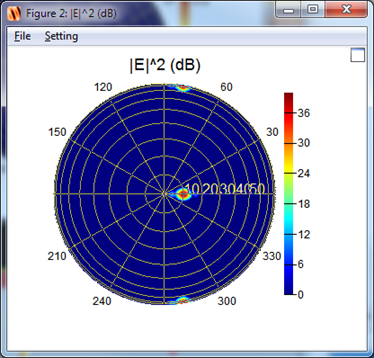
它将加载上一步创建的单天线角度分布数据。它允许用户设置目标极角 (theta) 和方位角 (phi),然后调整整个天线阵列的线性相位,使该阵列发射的 0 阶信号以该方向为目标。您可以指定天线元件数和振幅权重函数。为简单起见,角度数据被归一化为在线性刻度上绘制时最大强度为 1。对于 dB 比例图像,您可以指定 dB 范围,该范围决定了最大 dB 值,而所有低于 0 的值都将被截断,以方便查看图像。dB 范围设置应为正值。使用默认设置(theta_target=10,phi_target=0)和高斯振幅加权函数,脚本将生成以下图形:
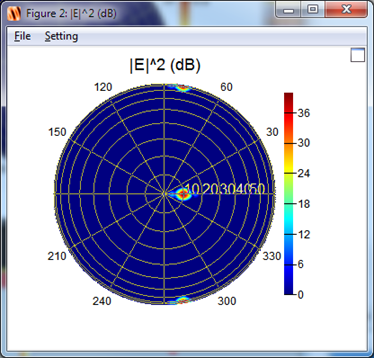
将最后一项改为辐射图,并查看 dB 结果,我们可以看到下图:
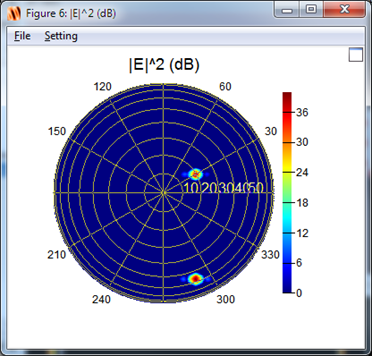
如果我们使用 target_theta=20 和 target_phi=30 重新运行,我们会看到以下数字:
步骤 3:使用 MATLAB 进行设计优化
在这一步,我们将使用 MATLAB 来优化天线阵列的间距和每个元件的振幅加权。此外,我们还将进行灵敏度分析。本示例使用 MATLAB R2018b 开发,还需要相控阵系统工具箱和优化工具箱。我们衷心感谢 MathWorks 公司的 Rick Gentile 协助我们开发这部分应用示例。
使用传感器阵列分析仪应用程序查看和操作相控阵
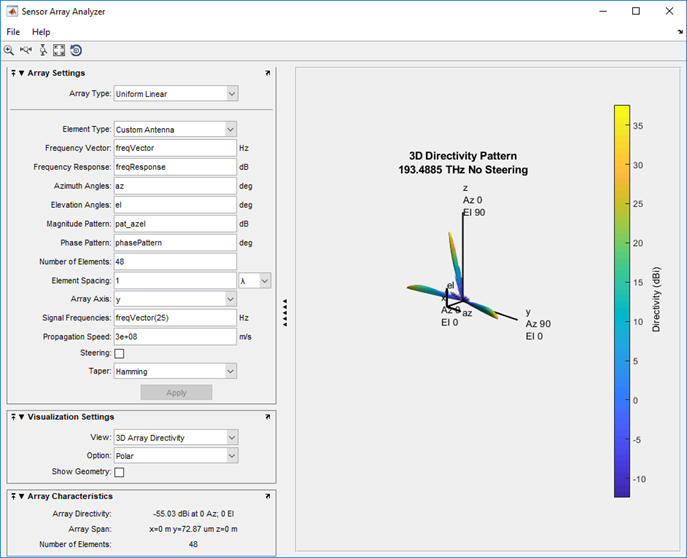
1.打开 MATLAB,在 MATLAB 命令提示符下输入 sensorArrayAnalyzer,启动传感器阵列分析仪应用程序。有关传感器阵列分析仪的更多信息,请参阅 www.mathworks.com/help/phased/ref/sensorarrayanalyzer.html。确保将工作目录设置为保存 antenna_data.mat 文件的相同目录。
2.在命令提示符下使用 load('antenna_data.mat') 加载数据。执行后,您将在 MATLAB 工作区窗口中看到以下数据:
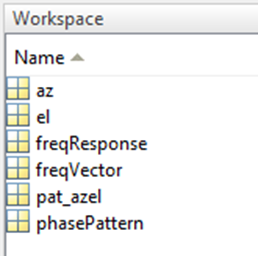
3.有了工作区中的这些数据,您就可以返回传感器阵列分析器。现在您将设置一个具有 48 个等间距元件的线性阵列设计。每个元件之间的间距应手动设置为 1 个波长。在应用程序中输入以下设置:
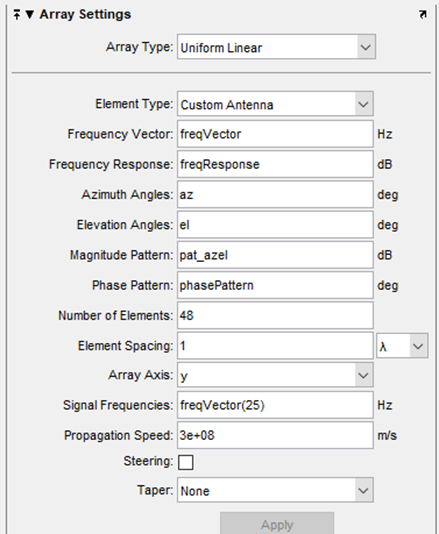
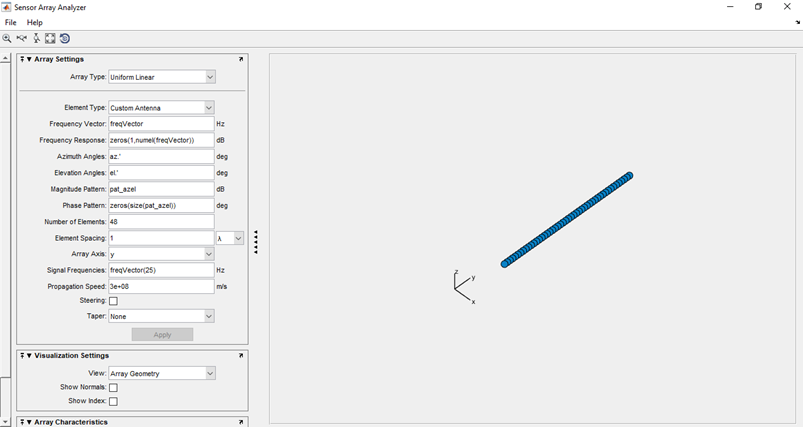
请注意,数据集包含 50 个频率向量的方位角和仰角模式。应用程序中评估和可视化的每个模式都代表 50 个频率矢量中的一个。在本例中,使用矢量 25 将显示中间频率矢量的结果。点击 "应用 "后,您将看到以下这个48元线性数组的数组结构:
现在将视图设置为 "3D 阵列指向性 "和 "极性",然后选择 "应用"。您应该会看到以下内容:
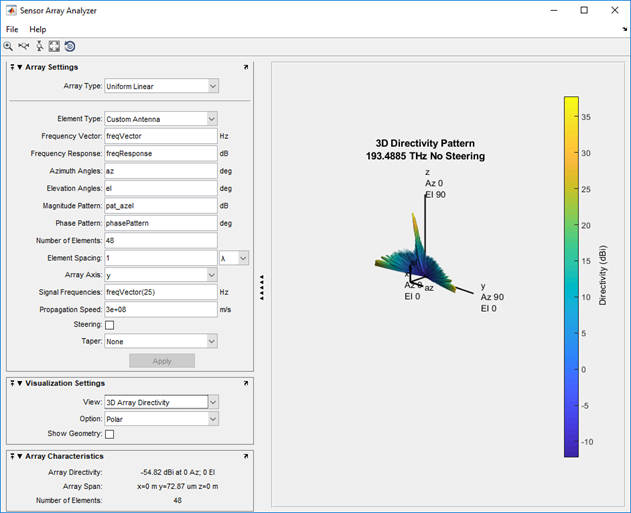
通过工具条,您可以放大或缩小图形。还可以旋转图案。尝试将 "Taper "设置为 "Hamming",以减少侧叶水平。注意主光束的形状。您可以看到 x-z 平面上的主光束。其他2个光束是由于1个波长的元件间距产生的。
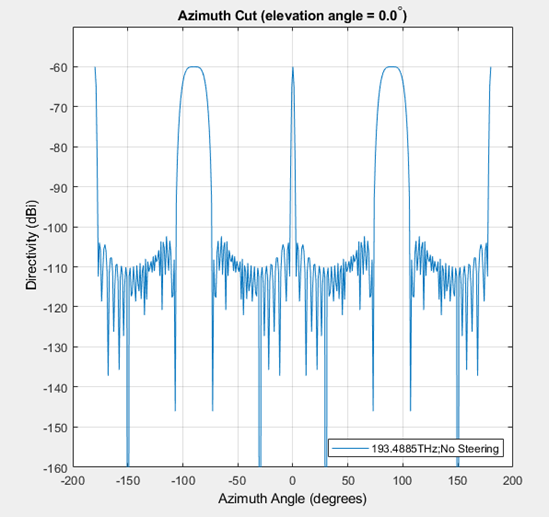
5.在 App 可视化设置中,选择 "2D 阵列指向性 "选项:
注意 +/- 50 度之间的图案形状:
您可以尝试在应用程序中输入转向值,方法是点击 :

记住要以方位角为单位转向。例如,要转向 +20 度,请在 "转向角 "框中输入 [20;0]。
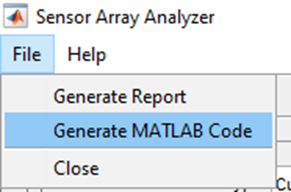
同样,对于您在应用程序中生成的任何图形,您都可以生成 MATLAB 代码,以便在其他模型中重新创建设计:
1.现在可以关闭传感器阵列分析仪了。
2.同时,在 MATLAB 命令行中键入
>> clear all
>> close all
直接从脚本可视化天线数据
现在我们来看看不同的频率矢量如何在波束模式的仰角方向提供转向。生成图表后,您可以旋转和缩放每个图表,以便更好地了解波束模式。
在 MATLAB 命令行中键入以下内容:
>>EX1_viewPattern
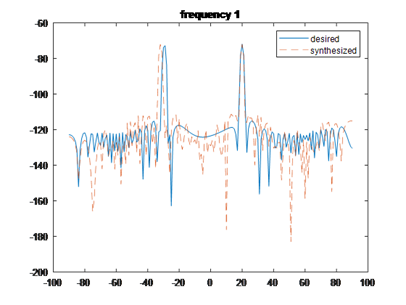
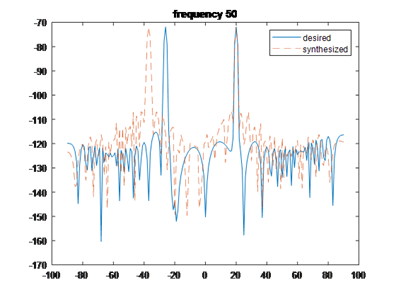
下图为频率向量 1、25 和 50时的图像。在每个频率图像中,您可以看到主光束(在 x-z 平面上)是如何在仰角上转向的。
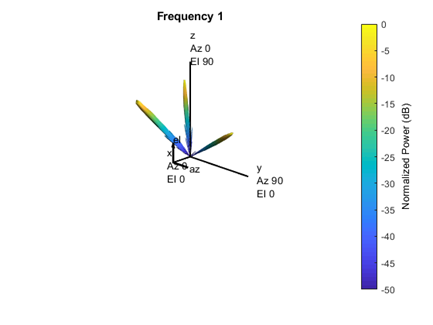
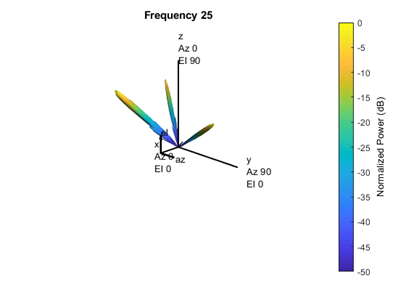
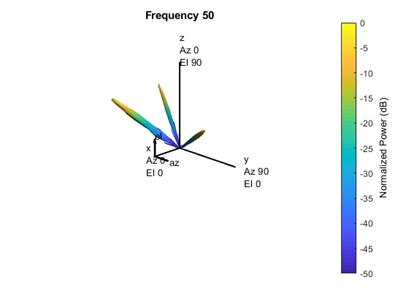
在生成的每一张图中,您都可以缩放和旋转图案,以便更好地了解图案。每个频率矢量的主要区别在于仰角平面(x-z)的转向变化。
优化天线阵列
现在,您将看到如何推导出元件间距和权重,以生成所需的模式。我们的起点是 Lumerical 图案的仰角切面。优化的目标是推导出间距和幅度权重,以确保我们在方位角看到的图案尽可能与仰角图案相匹配。其中一个限制条件是,我们将把匹配的方位角聚焦到 +/- 40 度,因为在最终系统中,光束将在 +/-20 度(方位角)之间转向。我们还将元素间距的起点设定为 1.1 * lambda。下图显示了示例的工作原理:

请注意代码、
N = 48; % 数组中有 48 个元素
azimuth = -40:40; % 在 +/- 40 度范围内匹配模式
我们还使用频率矢量 25 中的模式作为优化的基础。
1.在 MATLAB 命令行中键入以下内容:
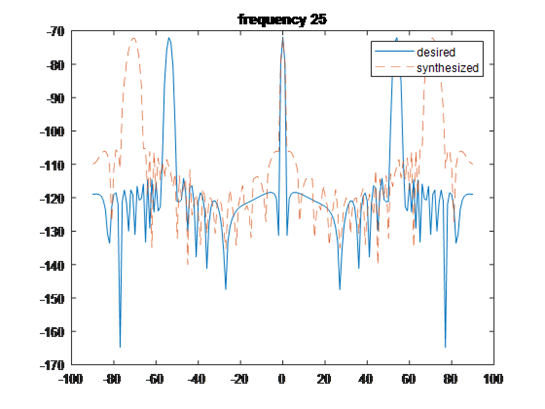
>> EX2_arraysynthesis
我们可以在 MATLAB 命令窗口中看到合成的结果:
间距 = 1.0598 * λ
请看下面 +/- 40 度角之间的曲线图。主光束的匹配非常接近。
由于间距和幅度值在设计实现过程中是固定的,因此唯一可编程的转向是通过线性相移来转向方位角方向。
在我们继续之前,有必要检查一下当我们将波束转向 20 度时,外部频率矢量会发生什么变化。
在下图中,我们使用从频率矢量 25 图案中得到的间距来生成频率矢量 1 和 50 的方位角图案。此外,还将光束的方位角转向 +20°。注意 +/- 20 度之间的模式。由于优化设置为覆盖 +/- 40 度,因此在 +/- 20 度的理想范围内不会出现栅瓣。
结果表明,在 +/- 20 度范围内匹配良好。栅瓣没有偏离所需的范围。
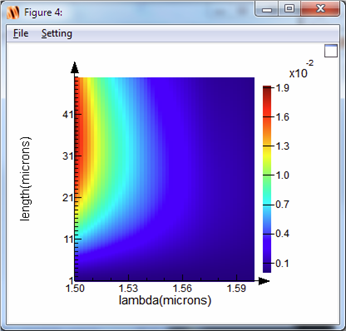
最后,您可以观察优化后的天线权重和耦合长度图,按照集成激光雷达系统概述中的设计,根据所需的权重确定耦合长度,同时了解耦合系数必须如何转化为该示例中所用定向耦合器的耦合长度。
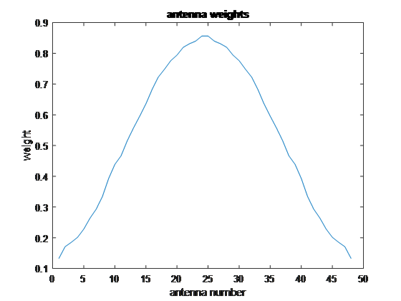
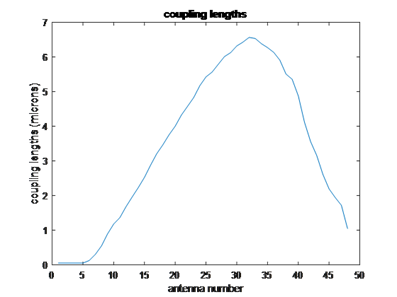
这些值与元件间距一起被写入 csv 文件,供以后在示例中使用,并可用于执行布局。这些文件分别称为 optimization_results_antenna_spacing.csv 和 optimization_results_coupling_length.csv。
考虑制造缺陷的影响
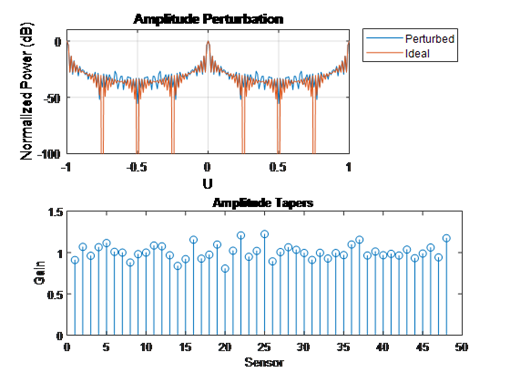
现在,您已经得出了间距和权重,让我们来看看在阵列中模拟振幅和相位扰动的方法。这些类型的扰动如果很严重,会对波束模式产生影响。
1.在 MATLAB 命令行中键入以下内容:
>> EX3_SensorArrayPerturbationExample
查看生成的每个图(振幅扰动)。您可以在由 48 个元素组成的均匀线性阵列 (ULA) 上添加增益或振幅扰动。在本例中,我们将扰动视为统计上独立的零均值高斯随机变量,标准偏差为 0.1。请看下图,比较受扰动阵列和理想阵列的响应:
当 ULA 天线中存在相位扰动时,也会产生类似的影响。在下图中,您可以看到扰动阵列与理想阵列的响应对比。
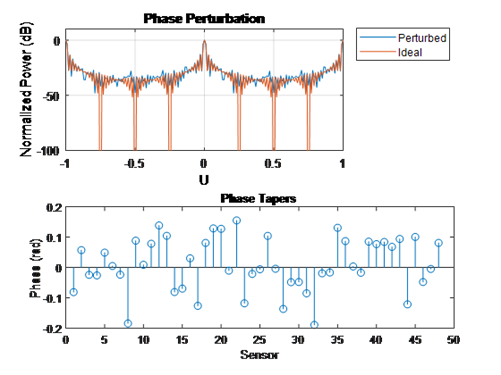
可以看出,大型阵列确实能够抵御振幅和相位的扰动。波束模式非常接近理想模式。您会在实际系统中看到这些类型的扰动,因此最好有一个评估波束模式性能的框架。
步骤 4:INTERCONNECT 中的相控阵紧凑模型
1.用 INTERCONNECT 打开文件 LIDAR_example.icp。该文件包含一个激光雷达传输系统,与附录(集成激光雷达系统概述)中描述的系统类似。如果需要,可以使用脚本文件 build_array.lsf 修改该系统的布局。该脚本还会根据 MATLAB 优化结果更新所有耦合系数和天线间距。
该文件包含使用脚本元素创建的相控阵紧凑模型。该紧凑模型有 48 个光学输入。根据模拟波段的中心频率以及 48 个输入端口的振幅和相位,它将计算出当前波束的方向,该方向由一个单位向量给出,该单位向量具有随时间变化的 x、y 分量 ux 和 uy。它还将确定波束宽度 ux_width 和 uy_width。然后可以将这些单位方向值转换为极角和方位角 theta 和 phi。这些值(包括频率)将以电信号的形式输出,如果在更大的系统仿真中使用这个紧凑的模型,例如使用 Cadence 的 Spectre AMS Designer,则会非常有用。
•设置脚本:该脚本可以通过声明变量和初始化设置来预留内存。如果beam_snapshots > 0,则该脚本会尝试加载预先保存在 antenna_data_lumerical.ldf 中的 FDTD 结果,以创建辐射角分布随时间变化的完整快照。
•脚本就绪:该脚本决定何时运行元素。对于这个紧凑型模型,当所有 48 个输入端口都有有效数据时,我们就可以运行了。
•运行脚本:该脚本以复数形式读取每个输入端口的所有数据。然后对结果进行傅立叶变换,以确定相控阵的效果,并找出与光束峰值相对应的 uy 值。它还能通过积分计算光束的宽度。这是在设置脚本中确定的给定 uy 值窗口内完成的(大约 |uy| < 0.42,对应于 y-z 平面上 +/-25 度的角度)。由于相控阵支持多个阶次,因此有必要将 uy 的值限制在一定范围内。如果 uy_width 变得非常大,则表明在可接受的 uy 范围内存在一个以上的阶次。ux 值是根据使用 FDTD 计算出的模拟频带中心频率确定的。ux_width 是根据 FDTD 计算出的器件衰减长度确定的。波束宽度根据 ux_width 和 uy_width 的最大值估算。
•如果用户指定的 beam_snapshots > 0,该脚本将创建角度分布的 beam_snapshot 视图数据集。
•总结脚本:该脚本会创建 ux、uy、wx_width、uy_width、angle_width、theta 和 phi 随时间变化的结果。如果用户设置 beam_snapshots > 0,它还会创建角度分布随时间变化的数据集,并将其保存到文件 beam_snapshots.mat,可以通过以下方法加载并可视化该数据集
•matlabload("beam_snapshots.mat");l
•visualize(E2_vs_time);
2.运行模拟。完成后,选择相控阵元素并查看结果视图窗口。选择 ux、uy、ux_width 和 uy_width,然后右击将它们全部可视化。调整时间单位后,您应该会看到以下结果:
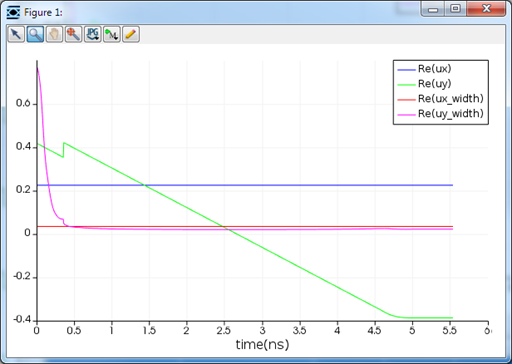
可以看到,随着电压的扫频,uy 的值呈线性变化。最初,uy_width 非常大,这表明要么没有形成光束,要么在跟踪的 uy 范围内存在不止一个光束(近似值 -0.42 至 +0.42)。
要查看极角和方位角的变化情况,请将 theta、phi 和 angle_width 可视化。您应该看到
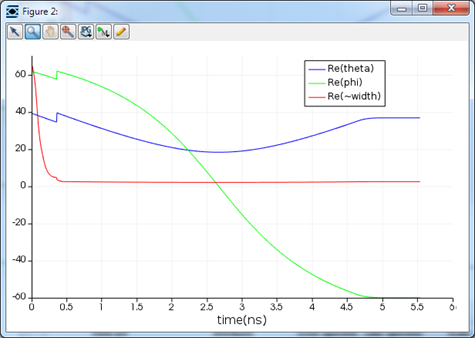
我们可以在大约 60 到 -60 度之间扫描方位角 phi。
3. 将角度分布视为时间函数。运行以下脚本命令:
>>matlabload("beam_snapshots.mat");
>>visualize(E2_vs_time);
您应该会看到下面的可视化界面,您可以点击时间步骤来制作如图所示的动画。
这类动画可以很容易地在 MATLAB 中自动完成,例如使用类似于制作 CW 电影的方法。
一些重要的模型设置
FDE::数据分析脚本
文件 LIDAR1.lms 在 FDE::data 组中使用了一个分析脚本。该脚本计算 neff_max(模式 1 的 neff 实部)、delta_n(模式 1 和模式 2 之间 neff 实部的差值)和 L10(10% 的光在波导 1 和波导 2 之间耦合所需的长度)。neff_max 值用于单波导时,而 delta_n 和 L10 则用于模拟区域内有 2 个波导时。
FDE求解器的对称性
对于 LIDAR1.lms 中的 FDE 求解器,在 z-min 处使用了对称边界条件 (BC)。这是因为我们在模拟中忽略了衬底硅。我们不在 y-min 处使用反对称边界条件,因为我们要研究两个波导之间的耦合,这需要了解对称和反对称模式。
FDTD 求解器中的对称性:LIDAR2.fsp 中的 FDTD 求解器在 y-min 处使用了反对称边界条件 (BC)。之所以可以这样做,是因为我们模拟的是 3 根天线的中间部分,并且只对类 TE 模式感兴趣。我们不能在 z-min 处使用对称平面,因为我们必须包括硅衬底。这是必要的,因为硅衬底会对光栅向上耦合的辐射量产生重大影响。
波导分析脚本
对于 LIDAR2.fsp 中的 FDTD 求解器,我们使用名为 waveguide_analysis 的分析组来计算 Ldecay(衰减长度)和 P2(邻近波导 2 中的功率与波长和传播长度的函数关系)。
FDTD 模拟 x 跨度
LIDAR2.fsp 中的 waveguide_antenna 结构组的 "目标长度 "属性为 20 um。该结构使用间距为 660nm 的整数周期,因此长度不会正好是 20 um。FDTD 求解器的 "x 跨度 "为 21.5 um,而波导分析组的长度为 21 um,以确保覆盖光栅的所有周期。因此,波导分析组计算出的衰减长度稍有不明确,因为它假定长度为 21 um而实际长度略有不同(20.46 um)。不过,这导致衰减长度的误差仅为百分之几。
FDTD 模拟时间
LIDAR2.fsp 中的模拟时间设置为 600fs,而不是默认的 1000fs。这只是为了让本示例运行得更快。为获得更精确的结果,模拟时间应增加到 1000fs 或更长,以便触发自动关机。由于我们在带隙内和带隙附近注入光,慢速光退出模拟可能需要很长时间。
FDTD 光源波长范围
请注意,本示例使用的是 LIDAR2.fsp 中的模式光源波长最初设置为 1500-1700nm 时的结果,然后我们将波长缩小到 1500-1600nm 以最终分析天线的辐射角分布。如果没有缩小波长范围,获得的结果将不相同。
根据参数更新模型
您可以根据自己的需要做出不同的设计选择。波导天线结构组和波导分析组已被参数化,因此您可以调整波导宽度、间距、光栅宽度、天线间距和元件数量。如果减小光栅宽度(这将导致更长的衰减长度),则可能需要增加 FDTD 仿真区域的 x 跨度以及波导天线和波导分析组的长度。
如果您想创建更复杂的设计,例如在每个周期调整光栅的宽度和间距,以优化发射光束的形状,那么您就需要编写自己的波导天线结构组,但除此之外,分析过程几乎是一样的。
如果您的设计导致远场光束非常窄,则可能需要提高 LIDAR2_analysis.lsf 中的 farfield_resolution 设置,目前的设置为 401。
进一步完善模型
更复杂的设计是调整天线光栅每个单元的间距和宽度,以尝试创建目标光束轮廓。这种设计可以通过步骤 1 中的 FDE 求解器计算出的信息来完成。这样就需要重新编写波导天线结构组,但大部分分析工作都是相同的。这可能还需要增加 FDTD 仿真区域的 x 跨度,因为我们不能再使用衰减长度计算来调整远场角分布。或者,也可以通过了解所尝试的光束轮廓类型来调整远场。
MATLAB 有许多工具箱和高级激光雷达分析功能,如点云处理。
其他资料
相关出版物
1.Christopher V. Poulton, Ami Yaacobi, David B. Cole, Matthew J. Byrd, Manan Raval, Diedrik Vermeulen, and Michael R. Watts, “Coherent solid-state LIDAR with silicon photonic optical phased arrays,” Opt. Lett. 42, 4091-4094 (2017).
集成激光雷达系统概述
本示例基于之前发表的作品:
Christopher V. Poulton, Ami Yaacobi, David B. Cole, Matthew J. Byrd, Manan Raval, Diedrik Vermeulen, and Michael R. Watts, “Coherent solid-state LIDAR with silicon photonic optical phased arrays,” Opt. Lett. 42, 4091-4094 (2017).
在此,我们将概述该激光雷达系统的工作原理,以及如何使用 Cadence、Lumerical 和 MathWorks 工具来设计和优化整个系统。
激光雷达的工作波长是关键设计参数之一。工作波长为905nm和1550nm的激光雷达在工业产品和研究实验室中都有报道。采用905nm激光器的产品最先进入市场,这主要是因为激光二极管和光电探测器价格低廉,而且在大气中的传输性能相对较好。最近,由于出现了最初为电信应用设计的高性能光子元件,波长为 1550nm的产品也获得了强劲的发展势头。利用传统CMOS制造工艺的硅光子技术日趋成熟,为使用高性能光子元件设计1550nm激光雷达提供了低成本解决方案。使用1550nm波长的另一个技术优势是,如果使用相同的天线间距,较大的半波长可带来更宽的视场,而不会产生边叶。1550nm波长的光波对眼睛也无害,因此可以使用更高的光功率扫描更远的范围。基于上述原因,本文介绍了一种工作波长在1550nm左右的光学相控阵激光雷达。欢迎用户利用本文所涉及的技术进行自己的探索。
光学相控阵激光雷达的发射端(TX)通常由一个确保一致性的单一光源(激光二极管)、一个将光线分成多个波导的功率分配结构、一个主动调整每个光波相位的相位控制机制以及一个将光线发射到自由空间的天线阵列组成。通过精心的相位控制,发射出的光波之间会产生干涉,从而形成指向某个方向的窄主光束,该光束可以动态转向。如图1所示,功率分配器和移相器采用级联结构,由带有交替定向耦合器接口和移相器的总线波导组成。在这种结构中,改变一个移相器的相位将改变其后所有天线的相位。通过将相同的相位φ应用于所有移相器,可以在天线输出端实现线性增加的相移,从而将波束物理转向一个方向。在本激光雷达设计中,相位调谐是通过使用热光学移相器实现的(见Poulton等人)。天线设计、天线阵列优化和参数化天线阵列布局的基础知识将在本文的第二部分介绍,第三部分将演示发射机仿真。
光学相控阵激光雷达设计示意图:
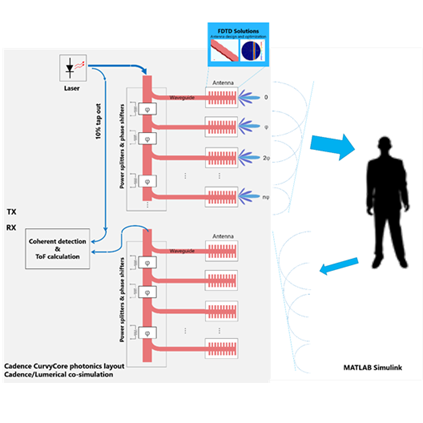
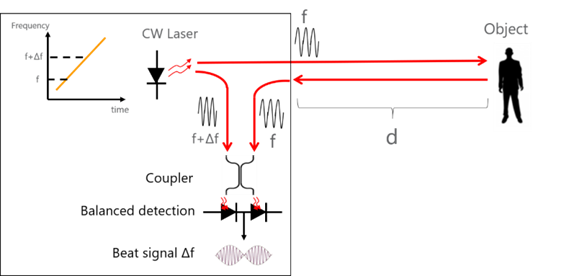
本文介绍的激光雷达的接收端采用了与发射端相同的天线阵列设计。如图2所示,这种激光雷达接收器的信号检测基于相干检测(Poulton等人),即接收光与激光源(即本地振荡器(LO))耦合出的一小部分光相结合。由于激光频率在时间上是线性扫频的,因此 LO 和接收光之间存在频率差,从而产生拍频信号。拍频可用于计算接收光的飞行时间(ToF),从而计算出被扫描物体的距离。接收器模拟将在本文的第3部分中介绍。
激光雷达相干探测方法图解:
本示例仅侧重于天线设计和优化,以及用于INTERCONNECT的紧凑型模型。Cadence 工具可用于在原理图层面设计系统,使用 Spectre AMS Designer 和 INTERCONNECT 执行电子-光子协同仿真,并使用 Virtuoso 设计环境的新 CurvyCore 功能布局器件。下面是一些示例图。
系统原理图:

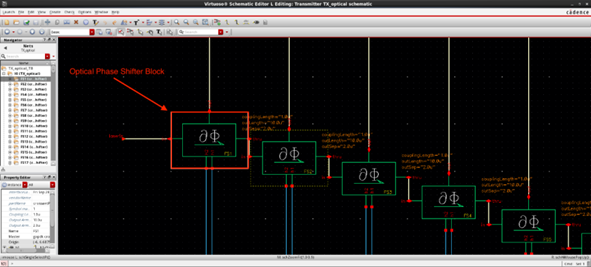
Virtuoso 布局编辑器中移相器和定向耦合器的视图:
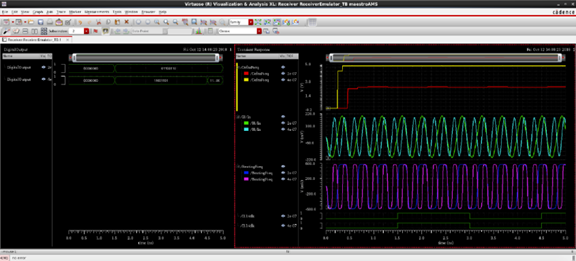
Spectre AMS Designer 和 INTERCONNECT 的联合模拟结果,显示接收器上的节拍频率检测:
![[java——基础] 双亲委派机制](https://img-blog.csdnimg.cn/direct/af60d2796b1148c48361151c636b8318.png)