一、一个粒子的模拟
规定一个物体在某一个时刻的速度和位置,如何解出某个时间之后它会出现在哪里
下图要求模拟一个粒子在速度场中要如何运动
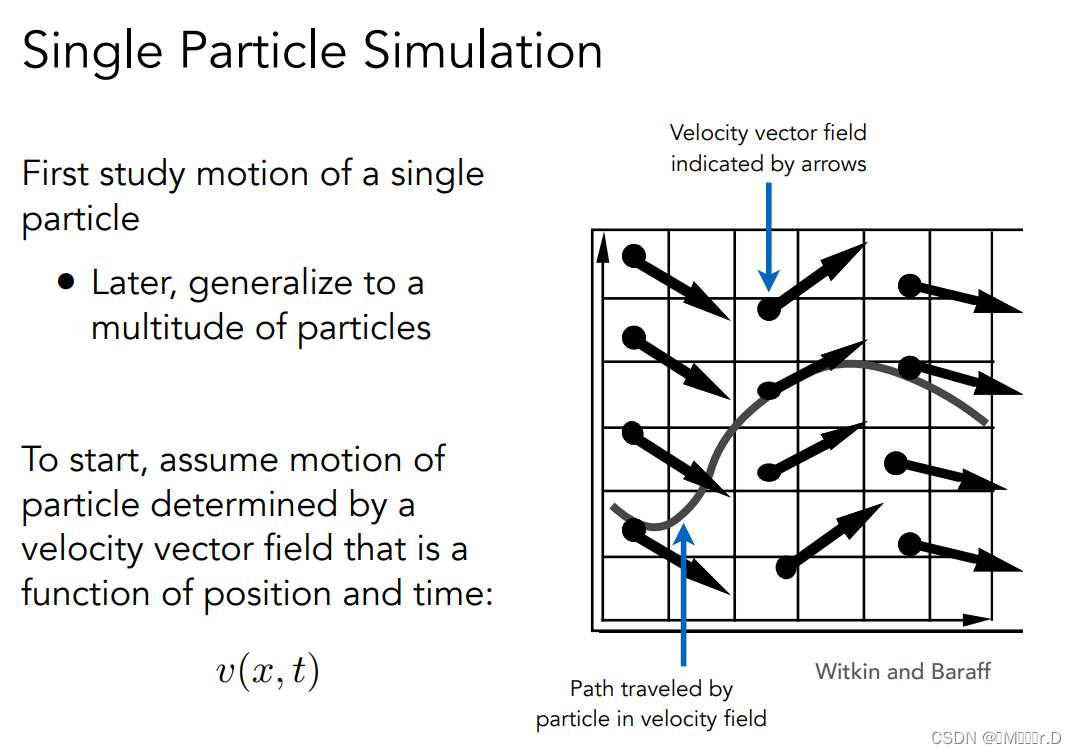
速度场中,在任何一个位置,我们都有它的速度
写出来相当于是常微分方程
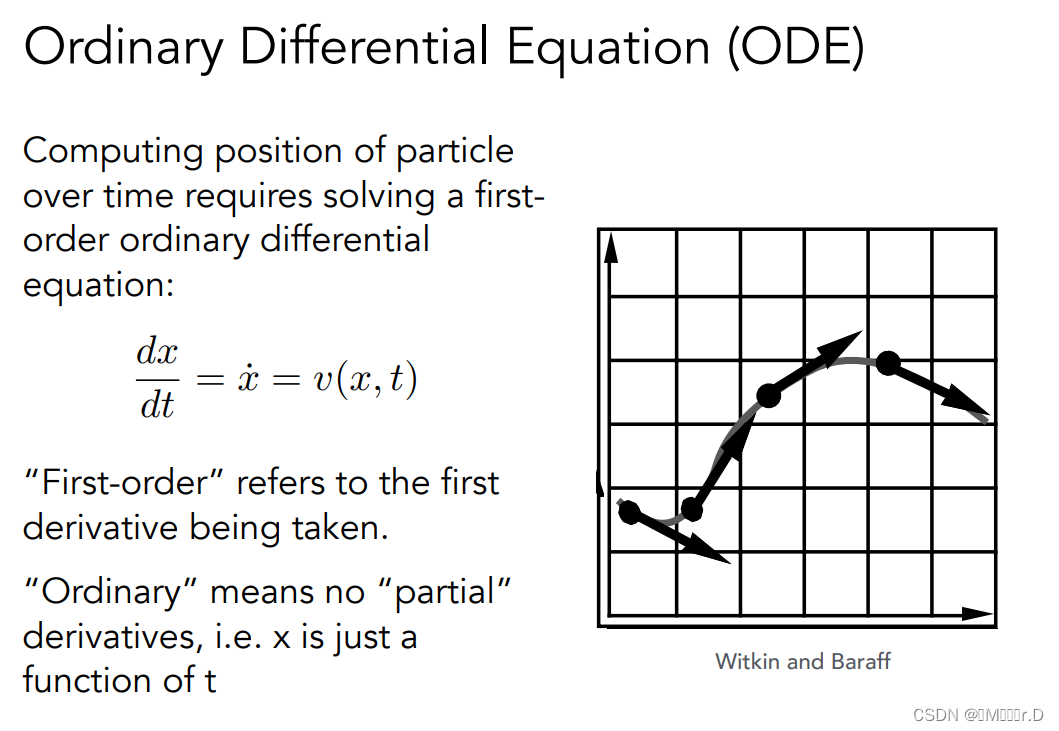
我们知道速度,想知道任何一个时刻的位置
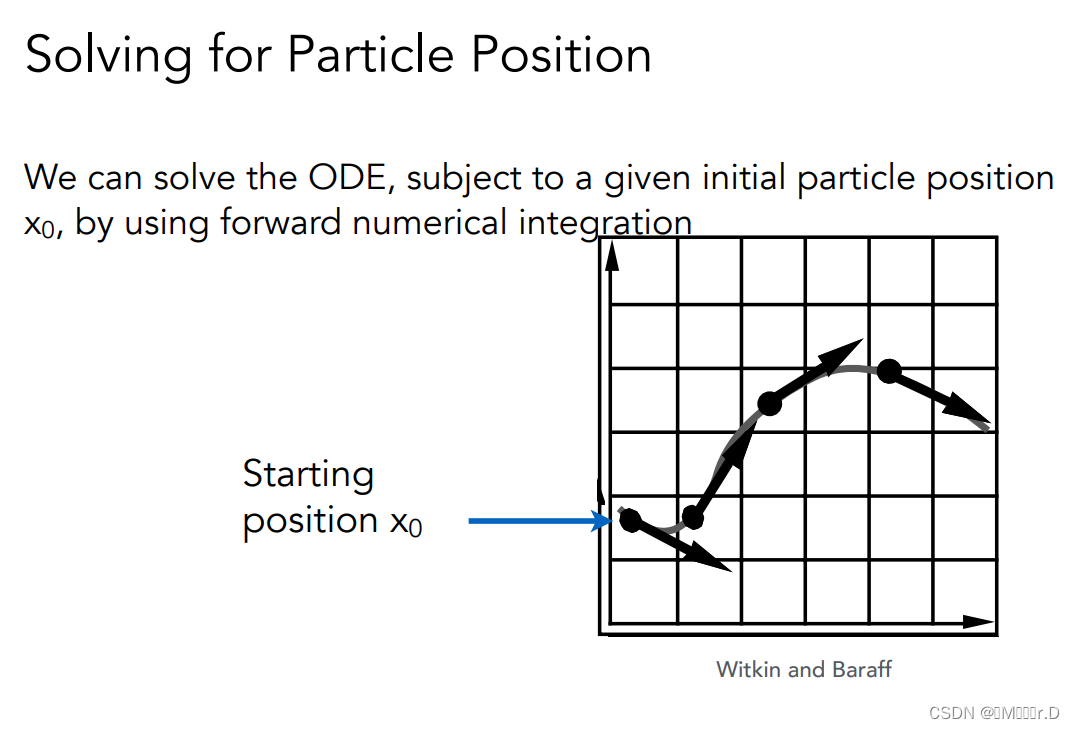
我们会给出起始位置,以及需要的时间,我们怎么解呢?
1.欧拉方法
- 欧拉方法:用上一时刻的位置、v、a 更新下一时刻
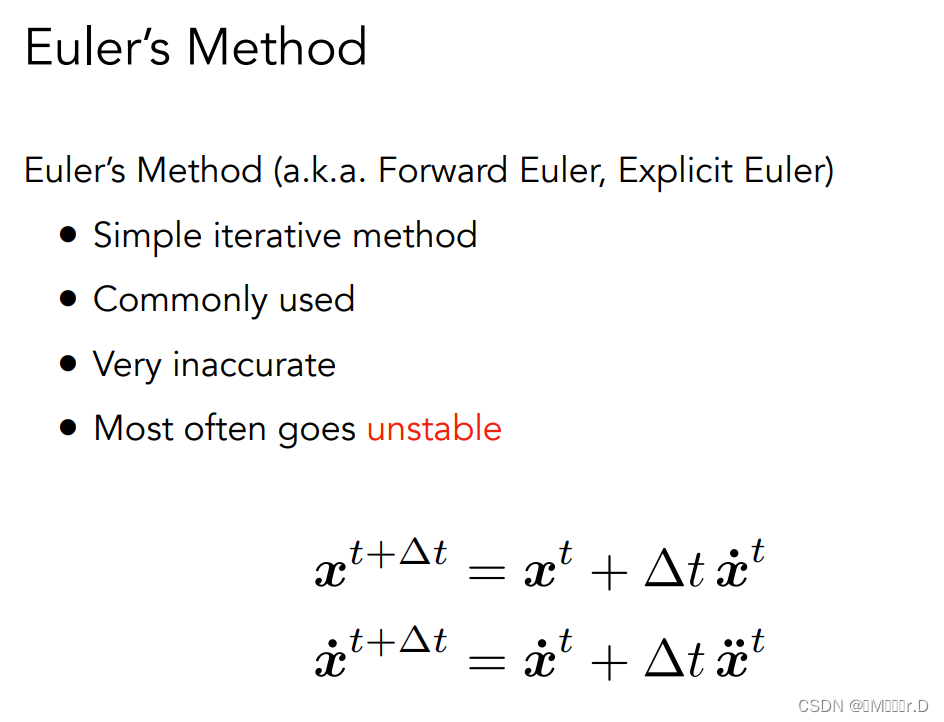
- 问题:不准,有误差
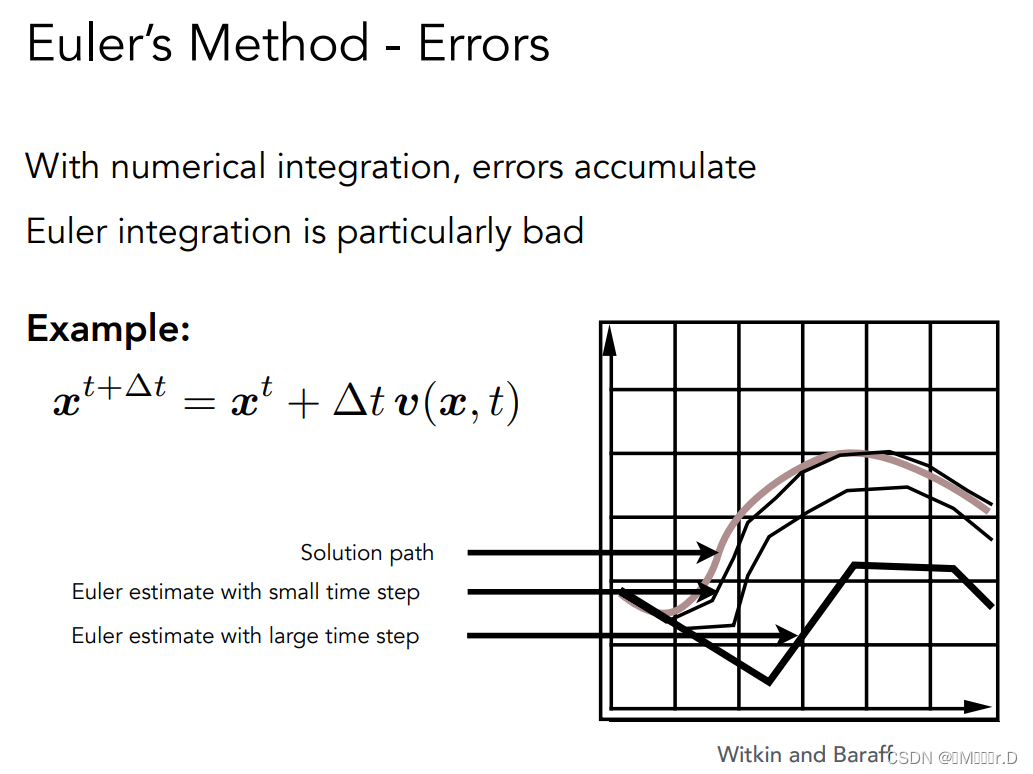
- 稳定性不行,会迅速变得不稳定,并且出现问题会被无限放大累计,也就是出现正反馈
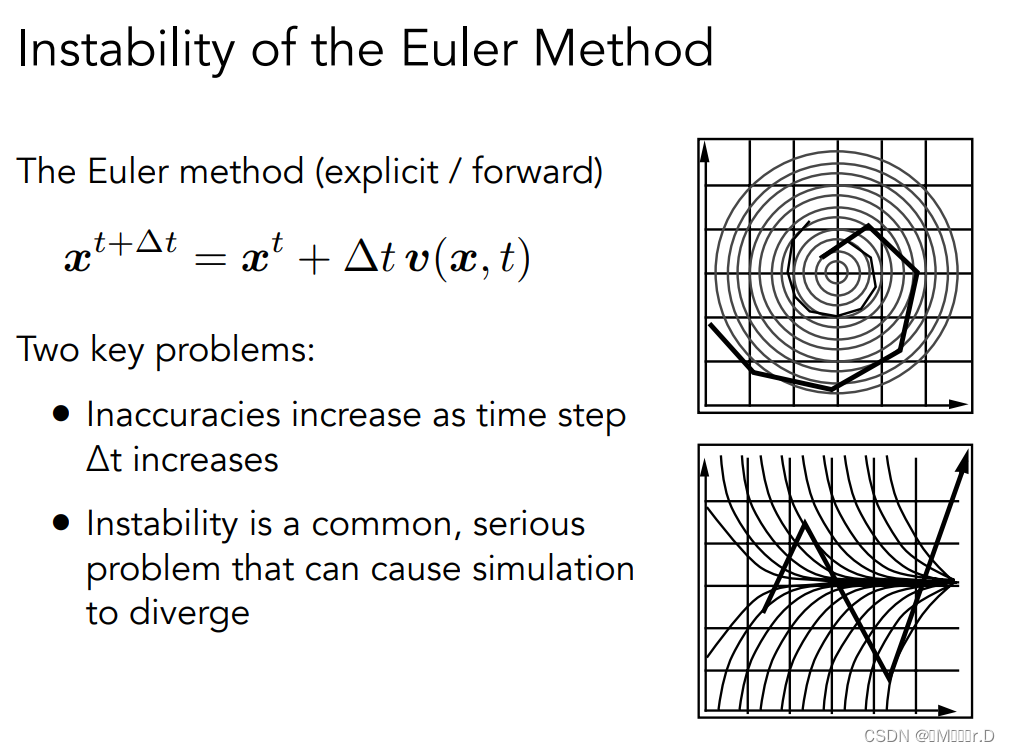
二、解决“不稳定”
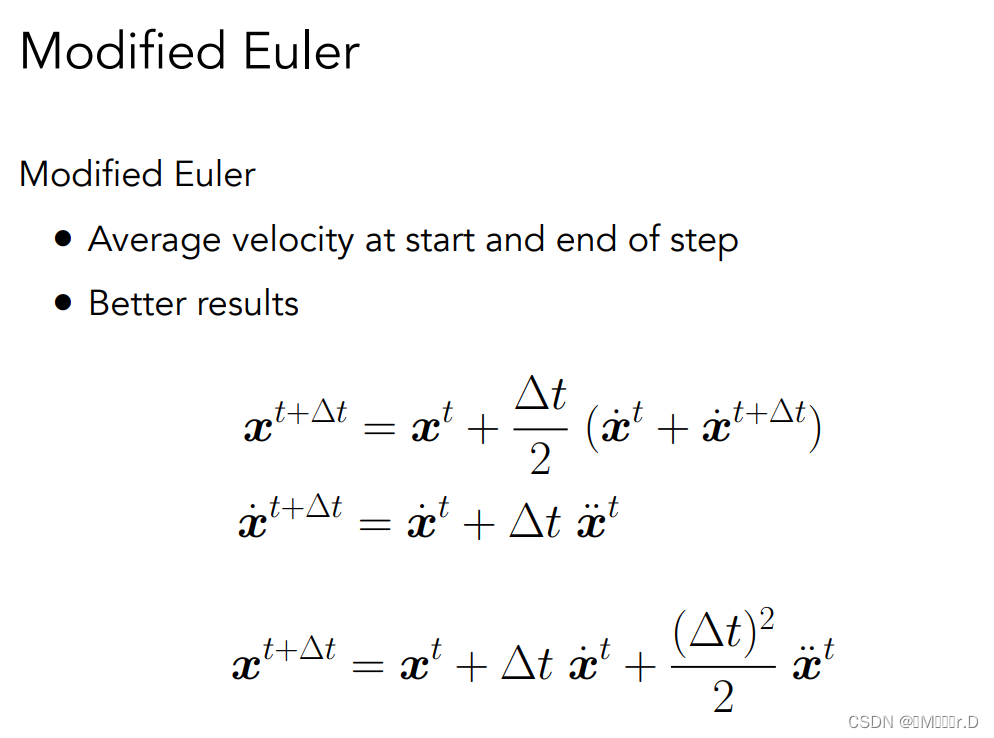
1.Midpoint Method中点法
中点法:在使用欧拉方法时,第一次使用得到中点的速度,然后取中点的速度,重新算一遍欧拉方法
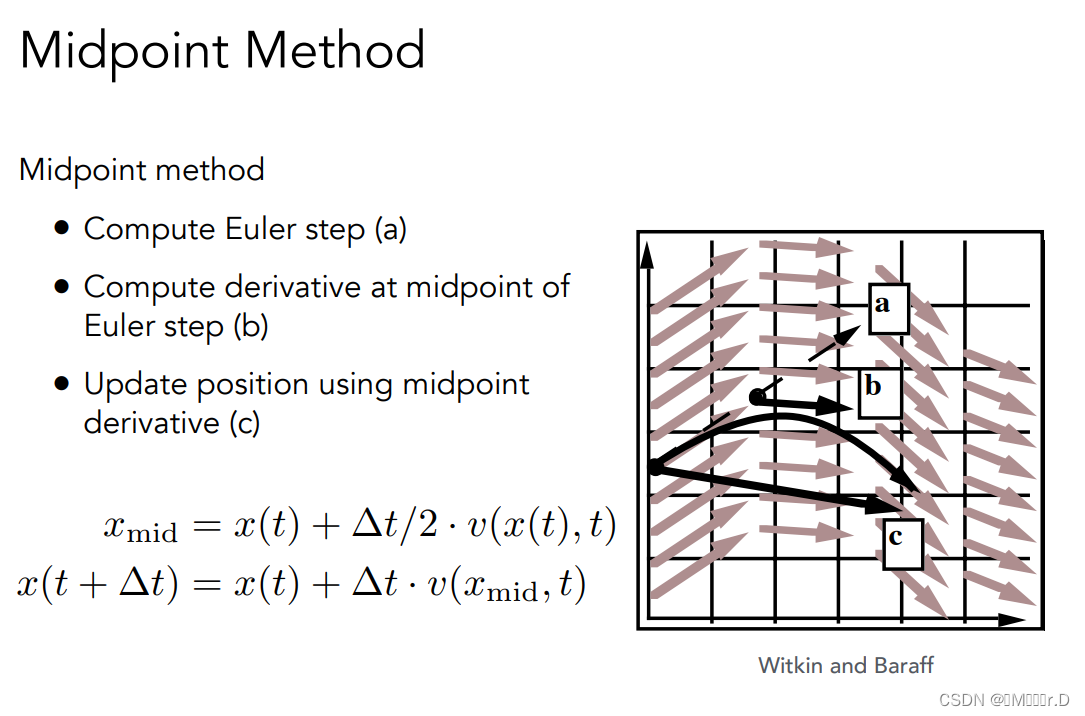
中点法其实是多了一个二次项
2.Adaptive Step Size自适应步长
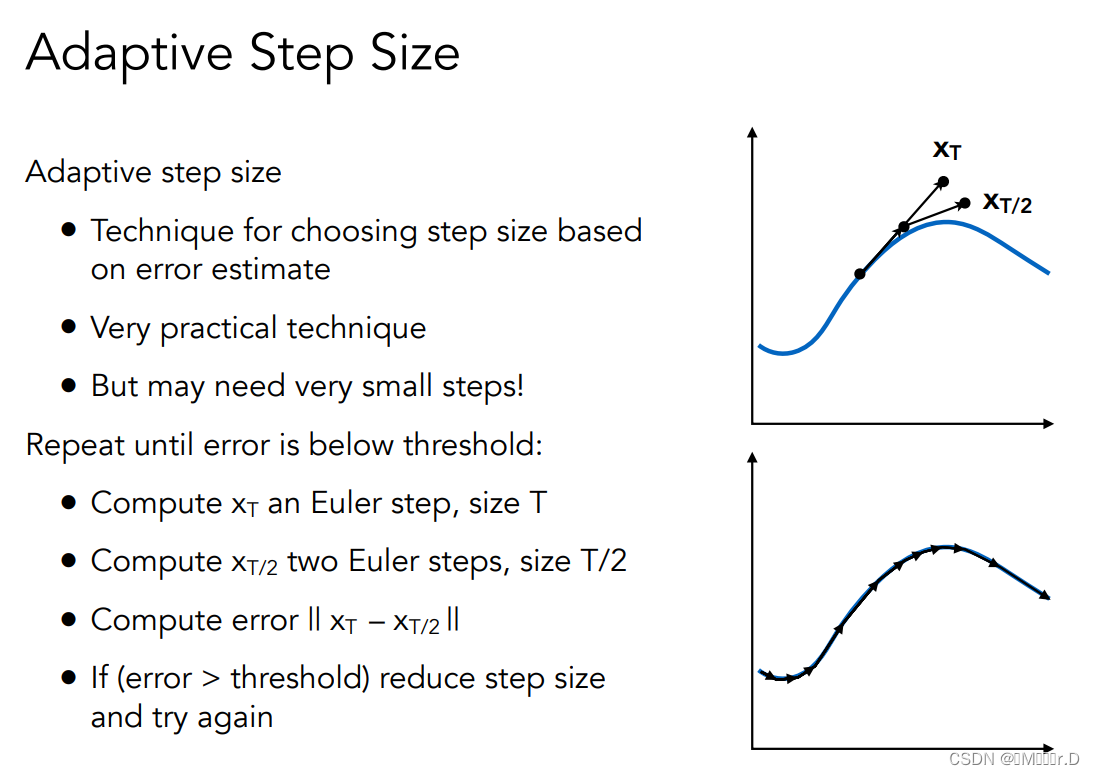
- 结合了中点思想,中点再算一次欧拉
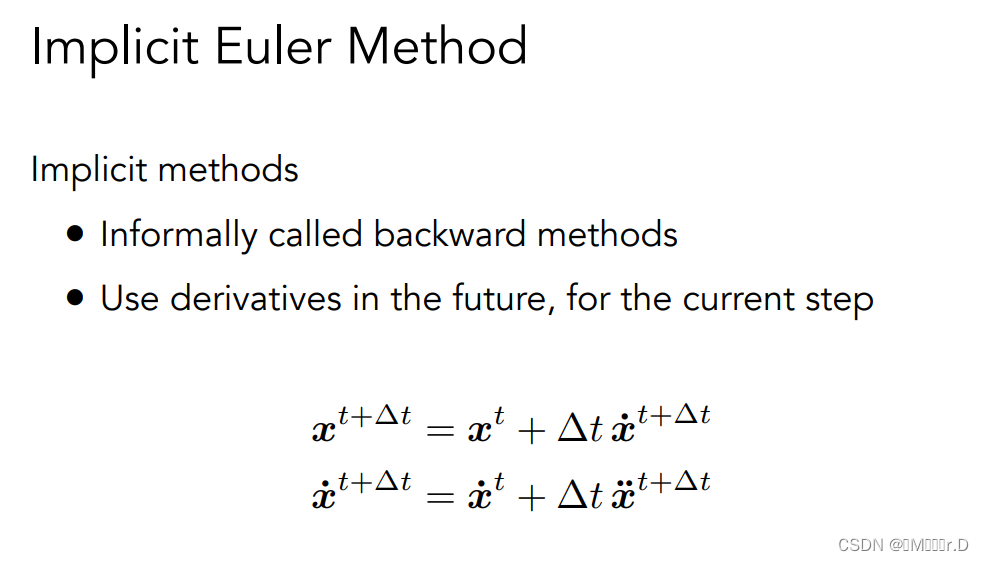
3.Implicit Euler Method 隐式/后向欧拉方法
用下一步的速度和加速度
一开始我们还不知道这些未来的数据,我们要解出当下的数据,不太好解
我们认为这个时刻的位置,下个时刻的加速度都知道,解出下个位置的速度和加速度
用优化方法来解,慢很多,但是稳定性好
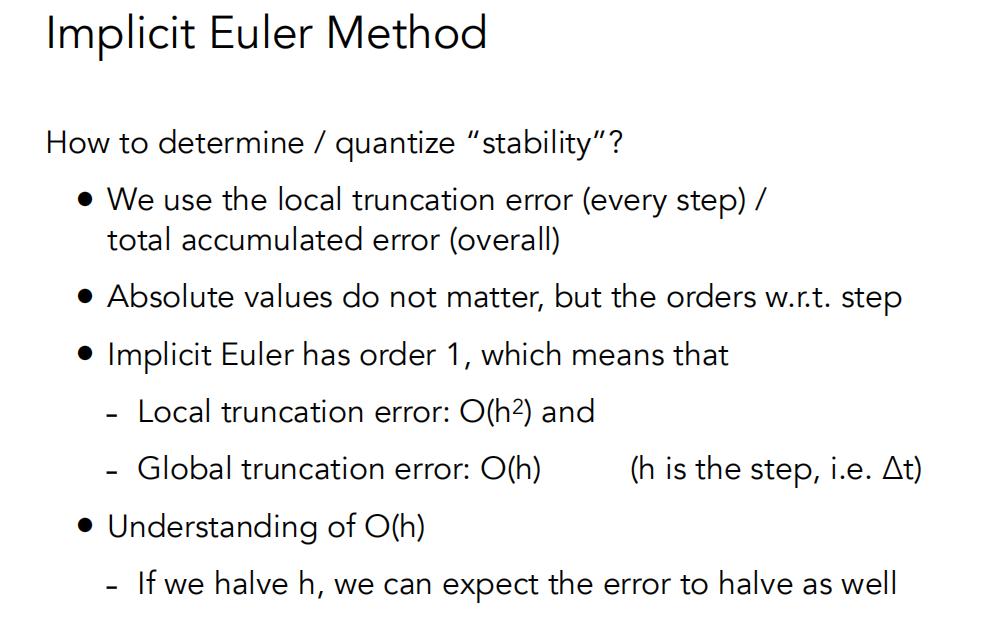
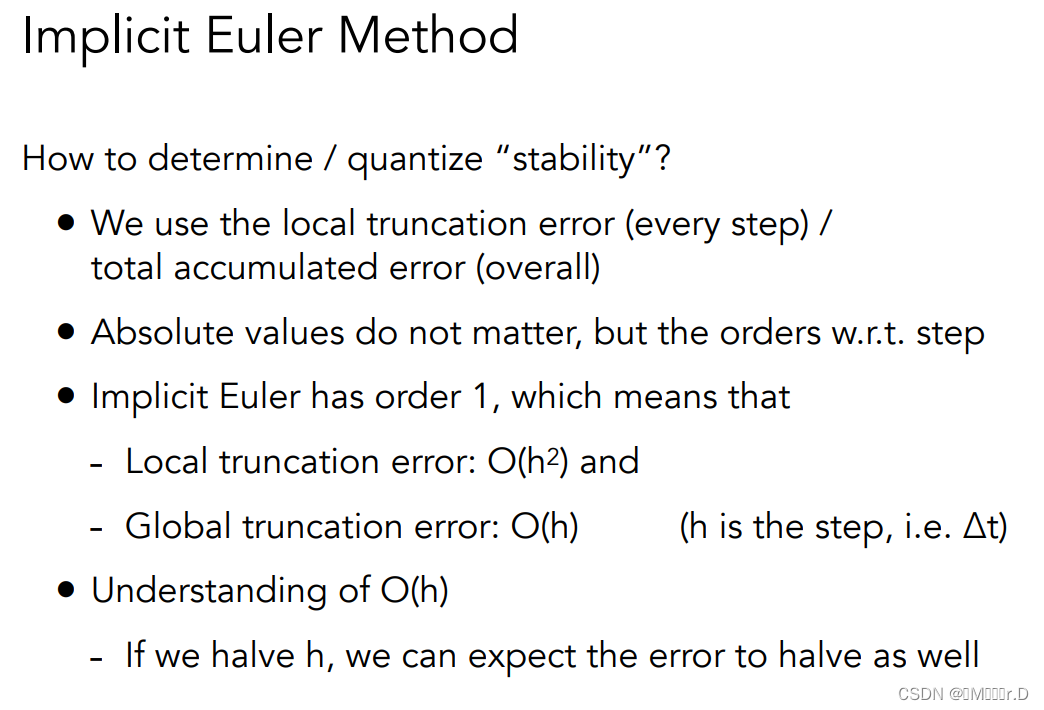
- 如何定义不稳定?
-
-
- 局部误差 →累积→ 总体误差
- 研究他们的“阶“(和△t的关系)
- 结论:隐式欧拉方法是一阶的(理解:如果h减小一半,误差也减小一半;h减小一半,误差减小到1/4)
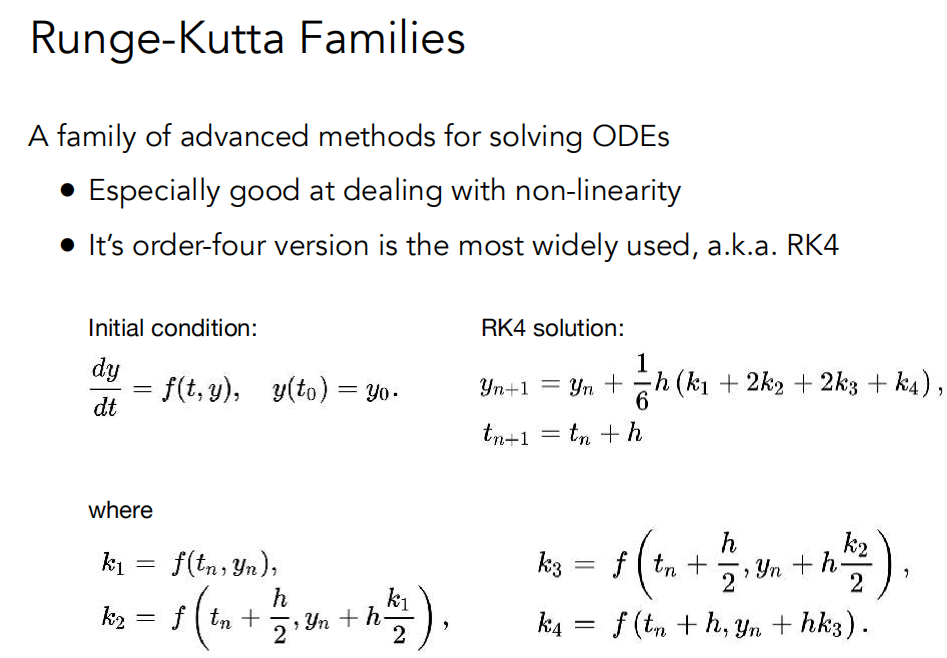
- Runge-Kutta Families 龙格库塔方法(一类方法)
-
- 擅长解ODE(常微分方程),特别是非线性模型
-
- 其中一个用的最多的:RK4(四阶的)
- 更详细的可以在数值分析课程中
-
- 其中一个用的最多的:RK4(四阶的)
三、Position-Based / Verlet Integration不是基于物理的方法
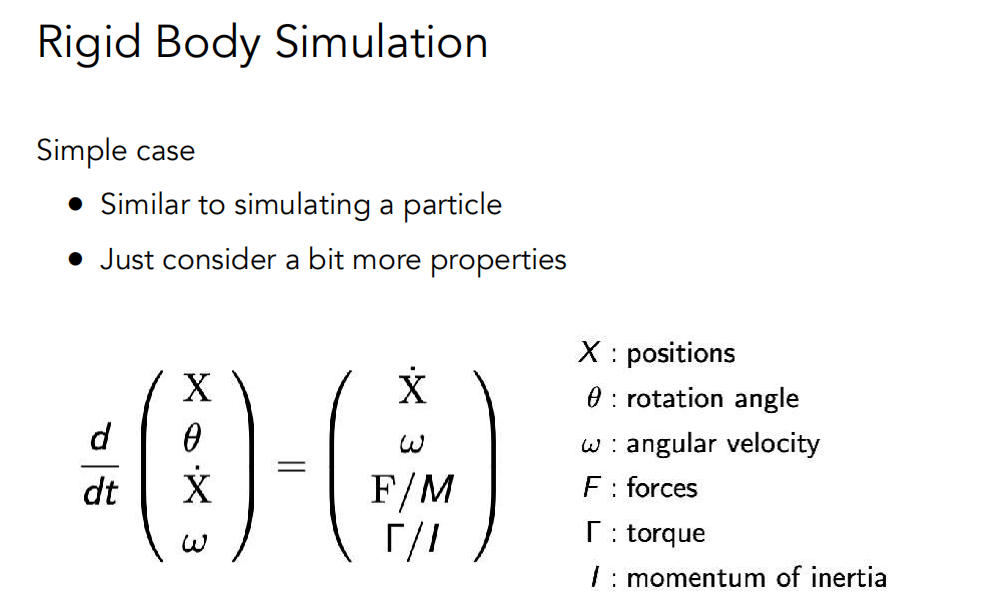
1.刚体模拟
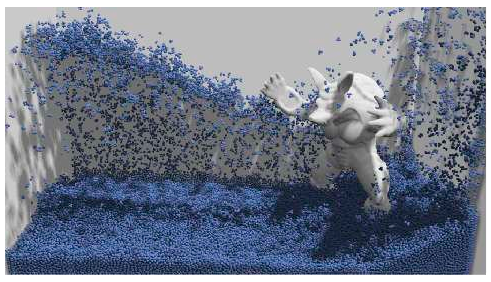
2.Fluid Simulation流体模拟
- 通过代表水的体积的小球的位置来模拟水的运动
-
- 认为水是不可压缩的刚体小球组成
- 水在任何位置都不可压缩
-
- 思路
-
- 任何一个时刻小球分布的位置的密度变成和水平静时的不一样,都要修正回来(通过小球的运动)
- 更新过程?
-
- gradient descent 梯度下降法(机器学习领域的词)
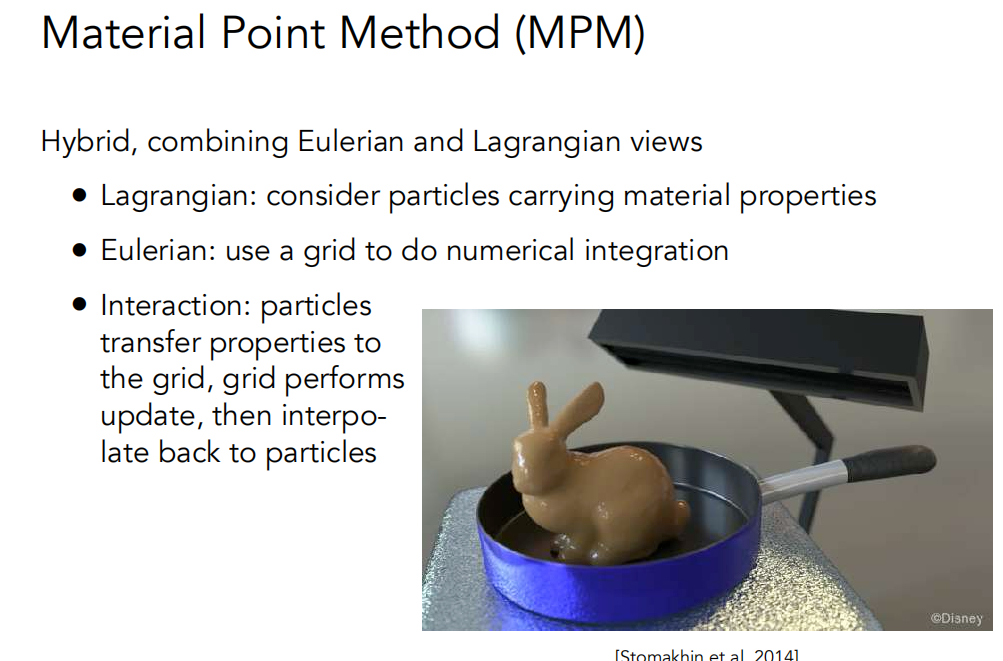
- 欧拉方法(支点法) VS 拉格朗日方法(网格法)
-
- 欧拉方法:把空间分为不同的网格,考虑一个网格的变化;(随着时间等)
- 拉格朗日方法:eg一群鸟→模拟一只鸟
- Material Point Method (MPM) (结合了欧拉和拉格朗日)