gazebo和Ros中的平衡车模拟(Noetic)
控制原理
使用说明
- 在URDF模型中使用gazebo的 imu 插件获取平衡车姿态
- 从 /joint_state 话题消息获取两轮的速度,相当于电机编码器
- 速度环和直立环使用 串级PID 控制,框图如下:
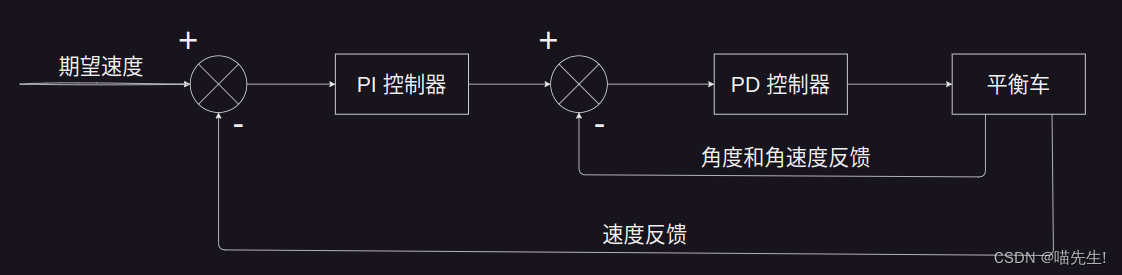
- 转向环只使用单级PID控制
-
功能包说明
- robo 包含平衡车模型,控制器配置文件和launch文件
- balancing_car_control
- controller.cpp 控制算法部分
- sensor.cpp 传感器感知部分
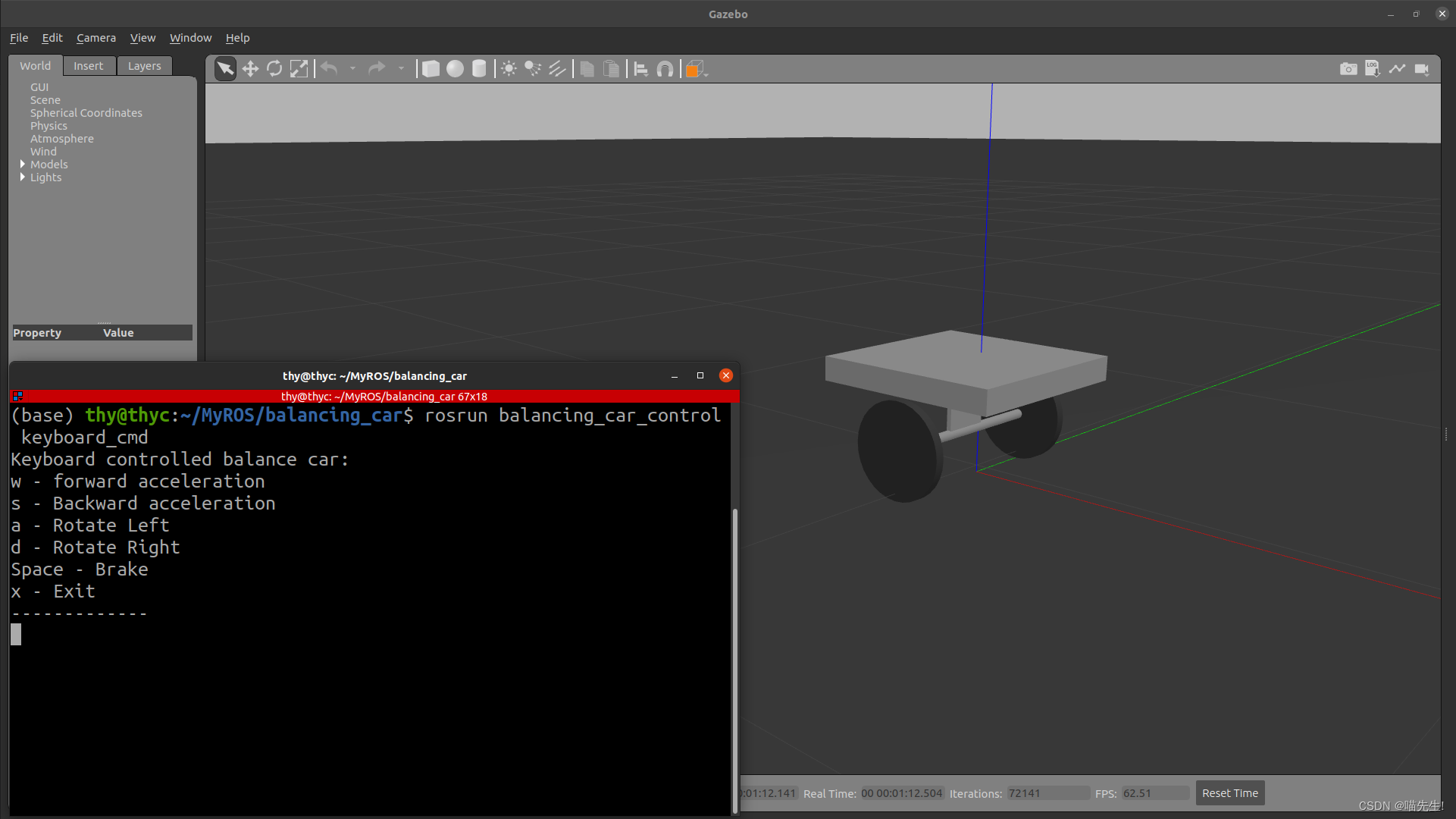
- keyboard_cmd.cpp 键盘运动控制部分
- 在该工程的根目录编译项目: catkin_make
- 刷新环境变量: source devel/setup.bash
- 运行主体: roslaunch robo car.launch
- 运行键盘控制节点: rosrun balancing_car_control keyboard_cmd
按键 功能 w,s 前后运动 a,d 左右转向 空格 停车 x 退出该节点 - PID参数还未调到最佳,但是也能用







![[项目设计] 从零实现的高并发内存池(三)](https://img-blog.csdnimg.cn/direct/6384886187d1479bb02dc9309581e80c.png)