适应EtherCAT/CANopen协议三相伺服电机直流伺服电机直线伺服音圈电机
如何开发高性能直流伺服电机驱动控制器?
需要熟悉高性能单片机(至少是ARM或DSP水平的),需要掌握空间磁场矢量控制FOC,需要掌握运动轨迹算法……此外需要花大量的时间进行调试,可能开发出来的性能不尽人意,比如定位不准,速度误差大,驱动电机发热严重等问题,还有可能反反复复设计PCB板-调试代码…….总之短时间开发稳定可靠的伺服驱控系统会比较困难。
幸好有了德国Trinamic 在嵌入式运动控制领域的全球领导者,将其可靠、稳定的运动控制算法集成在硬件里面,使客户达到降低成本目的的同时,花最少的时间,最小的工作量开发出可靠,卓越的电机运动控制系统。
为了让工程师现实在三天内完成开发伺服系统的目的,Trinamic开发出一款全球首款片载伺服控制系统的芯片TMCM1690-MotionCookie™
TMCC160-MotionCookie™集成了一个强大的门驱、Cortex-M4微处理器内核、基于固件实现的空间磁场矢量控制FOC。使硬件设计变的尽可能的简单和保持器件尽可能的少量。片载系统的TMCC160-MotionCookie™包括了嵌入式运动控制系统的所有核心组件。提供支持CANopen,EtherCAT和TMCL三种固件的芯片,用户只需要跟进自己的功率需要增加功率管,接上电源和上位主控就可以控制伺服电机了。
面对一些欧美进口伺服驱动价格比价高,用户自己开发对工程师技能要求比较高,对平台性能要求也比较高的诸多问题,德国Trinamic Motion Control公司推出一款可媲美进口欧美伺服品牌的低成本芯片级解决方案- TMCM1690
TMCM1690只需要用户根据自己的电机功率需求增加功率管,便可实现性能卓越的伺服控制系统,集成了伺服控制和协议栈。TMCM1690集成了Cortex-M微处理器内核,FOC算法,以及TMCL/CANopen/EtherCAT COE的应用层协议栈,此外还可支持程序存储,实现脱机运行。无需用户做任何底层的代码开发,一颗芯片等同于一款伺服控制系统。
TMCM1690是伺服系统的用户降低成本的最佳选择方案,满足用户三天内实现伺服开发,如需更多详情可VX:gavysz。
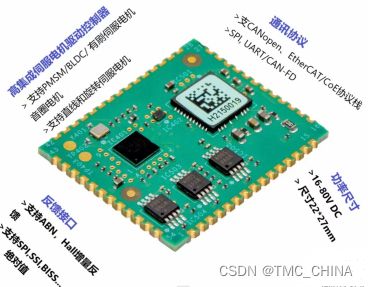
- TMCM1690功能介绍
TMCM-1690 是 单 轴 FOC 伺 服 电 机 控 制 模 块 集 成 预 驱 适 合 三 相 B L D C / P M S M 和 D C 有 刷 伺 服 电 机 , 带 有 高 达 1.5A 栅 极 驱 动 电 流 和 +60V (+48 V nominal) 供 电 . 提 供 了 UART (RS232-/RS485- ready), CAN 和 EtherCAT® 通讯接口支持TMCL, CANopen, 或 CANopen-over-EtherCAT 通讯协议.
TMCM-1690 支持增量编码器, 数字霍尔编码器, 和 绝 对 值 编 码 器 作 为 位 置 反 馈 。
功能特点:
• 电压范围+10 ... +60V DC
• 集 成 齐 全 的 适 合 B L D C / P M S M 、 D C 电 机 的 F O C 伺 服 控制 器 和 栅 极 驱 动
• 0.5A/1.0A/1.5A g栅极驱动电流
• 高 达 120kHz PWM 频 率
• 板载电流检测运放
• 支 持 UART (RS232/RS485-ready), CAN 和 EtherCAT® 通讯接口
• 支 持 增 量 编 码 器 (ABN), 数字HALL sensors, 绝 对 值 SPI编码器
• 参 考 开 关 输 入 、刹车、原点信号输入
• 封 装 尺 寸 27mm x 22.5mm
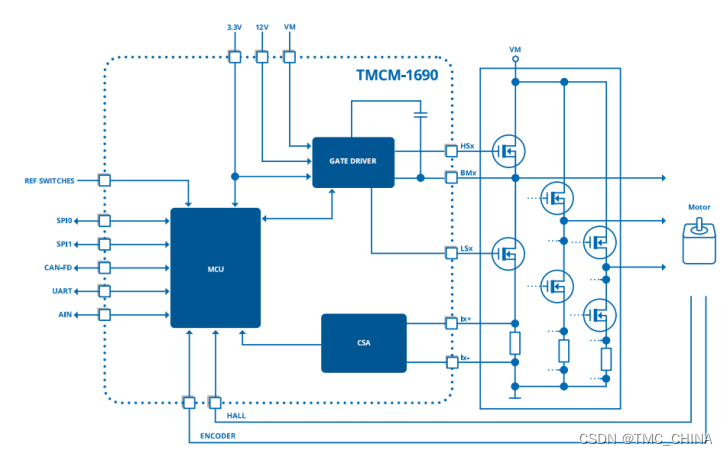
功能框图:
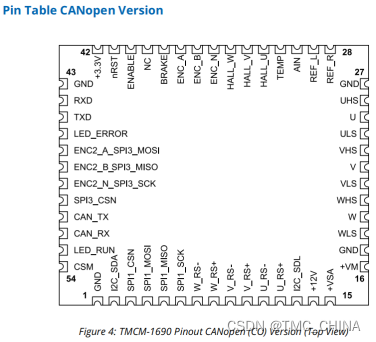
引脚定义:

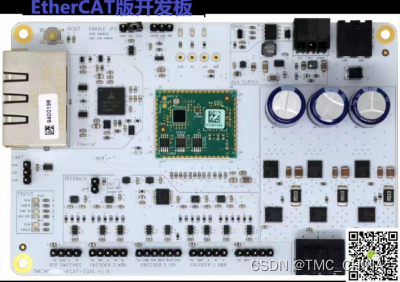
Trinamic为TMCM1690提供2款开源开发板分别为TMCM1690-CAN-EVAL和TMCM1690-ETHERCAT-EVAL版本,如需了解更多信息可加VX:gavysz

TMCM1690视频使用教程:
TMCM1690视频介绍:伺服片载EtherCAT,CANopen,RS485,SPI,IIC通讯;支持三相BLDC、PMSM直流有刷直线伺服和音圈电机;霍尔/ABN/SPI编码器反馈_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1ju4y1K761/
https://www.bilibili.com/video/BV1ju4y1K761/
如需更多支持可加VX:gavysz
BLDC、PMSM伺服电机片载模块TMCM1690配置方法支持双编码器反馈直线电机旋转电机绝对值编码器反馈_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV13B42167nK/?spm_id_from=333.337.search-card.all.click&vd_source=bc83e86415b4e55d53161956722fdda3
https://www.bilibili.com/video/BV13B42167nK/?spm_id_from=333.337.search-card.all.click&vd_source=bc83e86415b4e55d53161956722fdda3