二叉搜索树的性质
二叉搜索树(BST)是一种特殊的二叉树,它具有以下性质:
-
每个节点都有一个键(或值),并且每个节点最多有两个子节点。
-
左子树上所有节点的键都小于其根节点的键。
-
右子树上所有节点的键都大于其根节点的键。
-
左右子树也都是二叉搜索树。

二叉搜索树的常见方法
1. 插入节点(Insertion)
插入操作是将一个新的键值对添加到二叉搜索树中。插入过程需要保证树的二叉搜索属性:节点的左子树只包含小于节点键的节点,节点的右子树只包含大于节点键的节点。

2. 搜索节点(Search)
搜索操作用于在二叉搜索树中查找一个键。如果键存在,返回对应的节点;否则,返回nullptr或一些标志值表示键不存在。
3. 删除节点(Deletion)
删除操作涉及三种情况:
-
叶子节点:直接删除。
-
一个子节点:删除节点并用其子节点替代。
-
两个子节点:用其右子树的最小节点(或左子树的最大节点)替代该节点,然后删除那个最小(或最大)节点。

4. 遍历(Traversal)
二叉树的遍历通常有三种方式:前序(Pre-order)、中序(In-order)和后序(Post-order)遍历。对于二叉搜索树,中序遍历会按照键的升序访问所有节点。
二叉搜索树的中序遍历
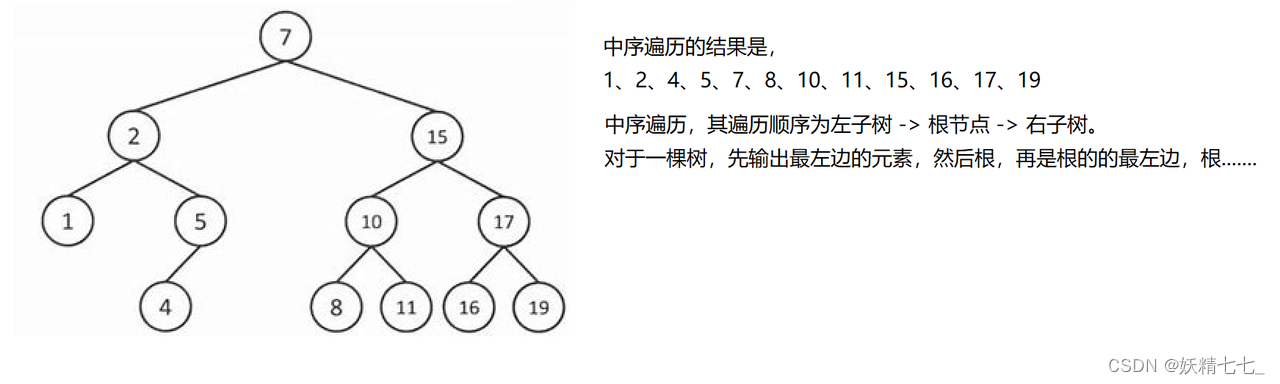
二叉搜索树(Binary Search Tree,BST)的中序遍历是指按照从小到大的顺序访问树中的所有节点。这种遍历方式是一种有序遍历,因为BST的性质保证了中序遍历的结果是有序的。
中序遍历,其遍历顺序为左子树 -> 根节点 -> 右子树。对于每一个小的单元,其左子树的值比根节点的值小,右子树的值比根节点的值大。中序遍历过程中,对于每一个单元都保证了值的从小到大输出。而对于单元的输出顺序,又满足最左边即最小的单元,依次变大。所以二叉搜索树的中序遍历,输出的结果就是值的升序序列。
二叉搜索又称作排序二叉树。因为其中序遍历输出的结果的有序的。
5. 查找最小和最大键(Finding Minimum and Maximum Key)
在二叉搜索树中查找最小和最大键很简单:沿左子树一直向下遍历可以找到最小键,而沿右子树一直向下遍历可以找到最大键。
6. 高度和深度(Height and Depth)
树的高度是从根节点到最远叶子节点的最长路径上的边数。树的深度是从根节点到某节点的路径上的边数。计算树的高度通常通过递归实现。
二叉搜索树的简单实现
#include <iostream>
using namespace std;
template<class T>
struct BSTNode {
BSTNode(const T& x = T())
: left(nullptr)
, right(nullptr)
, data(x)
{}
BSTNode<T>* left;
BSTNode<T>* right;
T data;
};
// 假设:树中节点的值域唯一
template<class T>
class BinarySearchTree {
typedef BSTNode<T> Node;
public:
BinarySearchTree()
: root(nullptr)
{}
~BinarySearchTree() {
Destroy(root);
}
bool Insert(const T& data) {
// 1. 空树---
// 新插入的节点应该是跟节点
if (nullptr == root) {
root = new Node(data);
return true;
}
// 2. 树非空
// a. 找待插入节点在树中的位置--->按照二叉搜索树的性质
Node* cur = root;
Node* parent = nullptr;
while (cur) {
parent = cur;
if (data < cur->data)
cur = cur->left;
else if (data > cur->data)
cur = cur->right;
else
return false;
}
// 树中不存在值为data的节点
// b. 插入新节点
cur = new Node(data);
if (data < parent->data)
parent->left = cur;
else
parent->right = cur;
return true;
}
Node* Find(const T& data)const {
Node* cur = root;
while (cur) {
if (data == cur->data)
return cur;
else if (data < cur->data)
cur = cur->left;
else
cur = cur->right;
}
return nullptr;
}
bool Erase(const T& data) {
// 1. 先找data是否存在
Node* cur = root;
Node* parent = nullptr;
while (cur) {
if (data == cur->data)
break;
else if (data < cur->data) {
parent = cur;
cur = cur->left;
} else {
parent = cur;
cur = cur->right;
}
}
// 值为data的节点不存在
if (nullptr == cur)
return false;
// 2. 找到值为data的节点,即cur--->将该节点删除掉
// 删除节点并且保存树的关系
// 有些节点可以直接删除,但是有些节点不能直接删除
// 需要对cur子树分情况讨论
// 1. cur是叶子
// 2. cur只有左孩子
// 3. cur只有右孩子
// 4. cur左右孩子均存在
// 经过图解分析发现:
// 情况1实际可以和情况2或者情况3合并起来
Node* pDelNode = cur;
if (nullptr == cur->left) {
// 说明cur可能是叶子节点,也可能是只有右孩子
if (nullptr == parent) {
// 删除cur刚好是根节点,且根没有左子树
root = cur->right;
} else {
// cur的双亲存在
if (cur == parent->left)
parent->left = cur->right;
else
parent->right = cur->right;
}
} else if (nullptr == cur->right) {
// 说明cur只有左孩子
if (nullptr == parent) {
// cur是根节点且根没有右子树,注意:左子树是一定存在的
root = cur->left;
} else {
if (cur == parent->left)
parent->left = cur->left;
else
parent->right = cur->left;
}
} else {
// 说明cur左孩孩子均存在
// 1. 在cur的子树中找替代节点,并保存其双亲
// 左子树:找最大的即最右侧节点
// 右子树:找最小的即最左侧节点---即中序遍历的第一个节点--和数据结构书本保持一致
pDelNode = cur->right;
parent = cur;
while (pDelNode->left) {
parent = pDelNode;
pDelNode = pDelNode->left;
}
// 2. 将替代节点中的值交给cur
cur->data = pDelNode->data;
// 3. 删除替代节点
if (pDelNode == parent->left)
parent->left = pDelNode->right;
else
parent->right = pDelNode->right;
}
delete pDelNode;
return true;
}
void InOrder() {
_InOrder(root);
cout << endl;
}
private:
void _InOrder(Node* proot) {
if (proot) {
_InOrder(proot->left);
cout << proot->data << " ";
_InOrder(proot->right);
}
}
void Destroy(Node*& proot) {
if (proot) {
Destroy(proot->left);
Destroy(proot->right);
delete proot;
proot = nullptr;
}
}
private:
BSTNode<T>* root;
};
void TestBSTree() {
BinarySearchTree<int> t;
int a[] = { 5, 3, 4, 1, 7, 8, 2, 6, 0, 9 };
for (auto e : a)
t.Insert(e);
t.InOrder();
BSTNode<int>* cur = t.Find(9);
if (cur) {
cout << "9 is in BSTree" << endl;
} else {
cout << "9 is not in BSTree" << endl;
}
cur = t.Find(13);
if (cur) {
cout << "13 is in BSTree" << endl;
} else {
cout << "13 is not in BSTree" << endl;
}
t.Erase(7);
t.InOrder();
t.Erase(0);
t.InOrder();
t.Erase(5);
t.InOrder();
}
int main() {
TestBSTree();
}代码解析
BSTNode 结构体定义
template<class T> struct BSTNode { BSTNode(const T& x = T()) : left(nullptr) , right(nullptr) , data(x) {} BSTNode<T>* left; BSTNode<T>* right; T data; };
这段代码定义了一个模板结构体 BSTNode,用于表示二叉搜索树(BST)的节点。
template<class T>:这是一个模板声明,声明了一个模板类型 T,它表示节点中存储的数据类型。
BSTNode(const T& x = T()):这是结构体的构造函数,用于初始化节点对象。它接受一个参数 x,默认值为类型 T 的默认构造值。这样设计使得创建节点对象时,可以不传入参数,默认构造出一个具有默认值的节点。
left(nullptr) 和 right(nullptr):这两行初始化了节点的左右子节点指针,初始值为 nullptr,表示这个节点暂时没有左右子节点。
data(x):这一行初始化了节点中存储的数据 data,其值为构造函数传入的参数 x。
BSTNode<T>* left; 和 BSTNode<T>* right;:这两行定义了指向左右子节点的指针,它们的类型为 BSTNode<T>*,即指向 BSTNode 类型的指针。这样的设计使得可以构建二叉树的数据结构,通过这些指针连接各个节点。
T data;:这一行定义了节点中存储的数据成员 data,其类型为模板参数 T,表示节点存储的数据类型。
BinarySearchTree 类定义
template<class T> class BinarySearchTree { typedef BSTNode<T> Node; public: BinarySearchTree() : root(nullptr) {} ~BinarySearchTree() { Destroy(root); } // 其他成员函数... private: BSTNode<T>* root; };
这段代码定义了一个模板类 BinarySearchTree,用于表示二叉搜索树(BST)。
template<class T>:这是一个模板声明,声明了一个模板类型 T,它表示树中存储的数据类型。
typedef BSTNode<T> Node;:这行代码定义了一个别名 Node,它表示 BSTNode<T> 类型,即树节点的类型。
BinarySearchTree() : root(nullptr) {}:这是类的默认构造函数。在其中,根节点 root 被初始化为 nullptr,表示空树。
~BinarySearchTree() { Destroy(root); }:这是类的析构函数。它调用了私有成员函数Destroy(root),用于销毁整棵树。通过递归的方式,首先销毁根节点的子树,然后销毁根节点本身。这样可以确保释放树中所有节点占用的内存,避免内存泄漏。
BSTNode<T>* root;:这一行定义了一个指针成员 root,用于指向树的根节点。这个指针的类型为BSTNode<T>*,即指向 BSTNode 类型的指针,其中 T 是模板参数,表示节点存储的数据类型。
插入操作 (Insert 函数)
bool Insert(const T& data) { // 1. 空树--- // 新插入的节点应该是跟节点 if (nullptr == root) { root = new Node(data); return true; } // 2. 树非空 // a. 找待插入节点在树中的位置--->按照二叉搜索树的性质 Node* cur = root; Node* parent = nullptr; while (cur) { parent = cur; if (data < cur->data) cur = cur->left; else if (data > cur->data) cur = cur->right; else return false; } // 树中不存在值为data的节点 // b. 插入新节点 cur = new Node(data); if (data < parent->data) parent->left = cur; else parent->right = cur; return true; }
这是一个公有成员函数 Insert,用于向二叉搜索树中插入新节点。它接收一个参数 data,表示要插入的节点的数据。
首先检查树是否为空。如果树为空(即根节点 root 为 nullptr),则将新节点直接作为根节点插入,并返回 true。
如果树非空,则需要找到新节点在树中的插入位置。根据二叉搜索树的性质,如果新节点的值小于当前节点的值,则应该往左子树方向查找插入位置;如果新节点的值大于当前节点的值,则应该往右子树方向查找插入位置。通过循环遍历直到找到合适的插入位置。
找到插入位置后,根据新节点的值与其父节点的值的比较结果,确定将新节点插入到父节点的左子树还是右子树。然后创建新节点,并将其连接到父节点相应的子树中。最后返回 true,表示插入操作成功。
查找操作 (Find 函数)
Node* Find(const T& data)const { Node* cur = root; while (cur) { if (data == cur->data) return cur; else if (data < cur->data) cur = cur->left; else cur = cur->right; } return nullptr; }
这是一个公有成员函数 Find,用于在二叉搜索树中查找具有特定值的节点。它接收一个参数 data,表示要查找的节点的值,并返回指向该节点的指针。
首先将当前节点指针 cur 初始化为根节点 root。然后开始一个循环,该循环会在树中查找目标节点,直到遇到空节点为止。
在循环中,首先检查当前节点的值是否等于目标值 data。如果相等,则找到了目标节点,直接返回当前节点指针。如果目标值小于当前节点的值,则应该继续在左子树中查找;反之,则在右子树中查找。根据比较结果更新当前节点指针 cur,继续向下搜索。
如果循环结束时仍未找到目标节点,则说明树中不存在值为 data 的节点,此时返回 nullptr,表示未找到目标节点。
删除操作 (Erase 函数)
bool Erase(const T& data) { // 1. 先找data是否存在 Node* cur = root; Node* parent = nullptr; while (cur) { if (data == cur->data) break; else if (data < cur->data) { parent = cur; cur = cur->left; } else { parent = cur; cur = cur->right; } } // 值为data的节点不存在 if (nullptr == cur) return false; // 2. 找到值为data的节点,即cur--->将该节点删除掉 // 删除节点并且保存树的关系 // 有些节点可以直接删除,但是有些节点不能直接删除 // 需要对cur子树分情况讨论 // 1. cur是叶子 // 2. cur只有左孩子 // 3. cur只有右孩子 // 4. cur左右孩子均存在 // 经过图解分析发现: // 情况1实际可以和情况2或者情况3合并起来 Node* pDelNode = cur; if (nullptr == cur->left) { // 说明cur可能是叶子节点,也可能是只有右孩子 if (nullptr == parent) { // 删除cur刚好是根节点,且根没有左子树 root = cur->right; } else { // cur的双亲存在 if (cur == parent->left) parent->left = cur->right; else parent->right = cur->right; } } else if (nullptr == cur->right) { // 说明cur只有左孩子 if (nullptr == parent) { // cur是根节点且根没有右子树,注意:左子树是一定存在的 root = cur->left; } else { if (cur == parent->left) parent->left = cur->left; else parent->right = cur->left; } } else { // 说明cur左孩孩子均存在 // 1. 在cur的子树中找替代节点,并保存其双亲 // 左子树:找最大的即最右侧节点 // 右子树:找最小的即最左侧节点---即中序遍历的第一个节点--和数据结构书本保持一致 pDelNode = cur->right; parent = cur; while (pDelNode->left) { parent = pDelNode; pDelNode = pDelNode->left; } // 2. 将替代节点中的值交给cur cur->data = pDelNode->data; // 3. 删除替代节点 if (pDelNode == parent->left) parent->left = pDelNode->right; else parent->right = pDelNode->right; } delete pDelNode; return true; }
这是一个公有成员函数 Erase,用于删除二叉搜索树中值为 data 的节点。它接收一个参数 data,表示要删除的节点的值,并返回一个布尔值,表示删除操作是否成功。
首先在树中找到值为 data 的节点。通过循环遍历,如果当前节点的值等于目标值 data,则找到了目标节点;如果目标值小于当前节点的值,则继续在左子树中查找;反之,则在右子树中查找。如果循环结束时,当前节点为空,则说明树中不存在值为 data 的节点,直接返回 false 表示删除失败。
在找到目标节点后,根据不同情况进行删除操作:
如果目标节点是叶子节点或者只有一个子节点,直接删除该节点并将其子节点连接到其父节点上。
如果目标节点有两个子节点,则需要找到它的后继节点(右子树中的最小节点)或者前驱节点(左子树中的最大节点)来替代它,保持二叉搜索树的有序性。将后继/前驱节点的值复制到目标节点上,然后再删除后继/前驱节点。
最后,释放被删除节点的内存并返回 true 表示删除成功。
中序遍历 (InOrder 和 _InOrder 函数)
void InOrder() { _InOrder(root); cout << endl; } private: void _InOrder(Node* proot) { if (proot) { _InOrder(proot->left); cout << proot->data << " "; _InOrder(proot->right); } }
这段代码实现了二叉搜索树的中序遍历,并提供了一个公有成员函数 InOrder() 用于调用中序遍历,并提供了一个私有辅助函数 _InOrder(Node* proot) 用于实际执行递归的中序遍历操作。
InOrder() 是一个公有成员函数,用于对二叉搜索树进行中序遍历。它调用了私有成员函数_InOrder(Node* proot) 来执行中序遍历操作,传入根节点 root 作为参数,并在遍历结束后输出换行符,以便在打印完所有节点后换行。
_InOrder(Node* proot) 是一个私有成员函数,用于实际执行递归的中序遍历操作。它接收一个参数proot,表示当前子树的根节点。在函数体内,先判断当前节点是否为空,如果不为空,则递归地对左子树进行中序遍历 _InOrder(proot->left),然后输出当前节点的值 cout << proot->data << " ";,最后递归地对右子树进行中序遍历 _InOrder(proot->right)。
这样,通过调用 InOrder() 函数,可以完成对整棵二叉搜索树的中序遍历,并按照升序打印出各个节点的值。
销毁树 (Destroy 函数)
void Destroy(Node*& proot) { if (proot) { Destroy(proot->left); Destroy(proot->right); delete proot; proot = nullptr; } }
这段代码实现了一个递归函数 Destroy,用于销毁二叉搜索树。
这是一个公有成员函数 Destroy,用于销毁二叉搜索树。它接收一个参数 proot,表示当前子树的根节点的引用。这里使用引用是因为在函数中会修改根节点的指针,将其置为 nullptr。
首先检查当前节点是否为空,如果为空,则表示当前子树已经被销毁或者是空树,直接返回。如果不为空,则执行销毁操作。
递归调用 Destroy 函数,分别对当前节点的左子树和右子树进行销毁操作。通过递归,可以先销毁左子树,再销毁右子树,最后再销毁当前节点,从而实现对整棵树的销毁。
在递归回溯的过程中,当左右子树都被销毁之后,对当前节点进行销毁操作。首先释放当前节点占用的内存,然后将当前节点指针置为 nullptr,以避免出现悬空指针。这里使用了引用 Node*& proot,使得在函数外部调用 Destroy 函数后,根节点的指针也会被置为 nullptr,从而确保树被正确销毁。
这样,通过调用 Destroy 函数,可以销毁整棵二叉搜索树,释放所有节点占用的内存。
结尾
最后,感谢您阅读我的文章,希望这些内容能够对您有所启发和帮助。如果您有任何问题或想要分享您的观点,请随时在评论区留言。
同时,不要忘记订阅我的博客以获取更多有趣的内容。在未来的文章中,我将继续探讨这个话题的不同方面,为您呈现更多深度和见解。
谢谢您的支持,期待与您在下一篇文章中再次相遇!






![第十四章[面向对象]:14.3:实例属性](https://img-blog.csdnimg.cn/img_convert/ca8ae8a1466c25d3d6a9860100f895bc.jpeg)