目录
一、RT-Thread主要功能组件
二、内核组件
2.1 概述
2.2 API
三、设备驱动
3.1 概述
3.2 API
四、通信组件
4.1 概述
4.4 API
五、网络组件
5.1 概述
5.2 API
5.3 补充:MQTT协议
六、文件系统
6.1 概述
6.2 API
七、GUI 组件
7.1 概述
7.2 API
一、RT-Thread主要功能组件
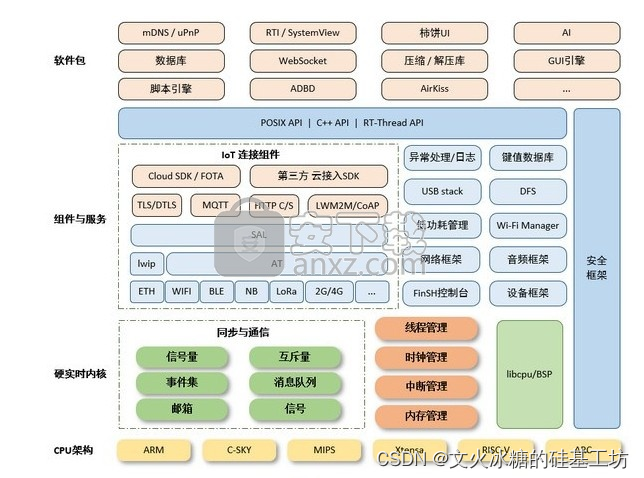
RT-Thread(Real-Time Thread)是一个开放源代码的实时操作系统,主要针对嵌入式系统和物联网应用设计。RT-Thread 提供了一系列的功能组件,以满足不同应用的需求。以下是 RT-Thread 的主要功能组件:
-
内核组件:
- 线程调度:实现多线程切换和调度功能。
- 信号量:用于线程间同步和互斥访问共享资源。
- 事件:用于线程间的事件通知和等待。
- 互斥锁:提供线程间对共享资源的互斥访问。
- 定时器:用于定时任务和延时操作。
- 信号量、互斥锁和事件都是实时操作系统中常见的同步机制。
-
设备驱动:
- GPIO:用于控制和读取通用输入输出端口。
- UART、SPI、I2C:用于串行和并行总线的通信。
- 网络协议栈:支持多种网络协议,如 TCP/IP、UDP、HTTP 等。
- 文件系统:支持常见的文件系统,如 FAT、YAFFS、ROMFS 等。
-
网络组件:
- TCP/IP 协议栈:提供网络通信和连接管理功能。
- LwIP:支持轻量级的网络通信协议。
- MQTT:支持物联网通信协议 MQTT。
-
通信组件:
- 消息队列:用于线程间的消息传递与通信。
- 邮箱:用于线程间的消息传递与通信,支持阻塞操作。
-
文件系统:
- FAT 文件系统:用于支持存储设备上的文件操作。
- YAFFS 文件系统:用于嵌入式设备上的闪存操作。
- ROMFS 文件系统:用于将文件系统编译进应用程序镜像。
-
GUI 组件:
- 绘图库:支持图形界面的绘制和显示功能。
- 控件库:提供常见的用户界面控件,如按钮、文本框、列表等。
除了以上功能组件,RT-Thread 还提供了许多其他的支持,如软件包管理器、调试组件、GUI 库等。这些组件可以根据具体的应用需求进行选择和配置,以构建适合的嵌入式系统或物联网应用
二、内核组件
2.1 概述
RT-Thread 内核提供了许多内核组件,用于进行任务调度、线程管理、系统时钟、内存管理、设备驱动和通信等方面的功能支持。以下是一些常用的内核组件的详解:
-
任务调度器(Scheduler):负责管理系统中的所有线程,并按照优先级决定线程执行顺序。RT-Thread 提供了多种调度算法,如优先级调度、时间片调度和抢占式调度,以满足不同应用场景的需求。
-
内存管理器(Memory Manager):提供了动态内存分配和释放的接口,应用程序可以使用内存管理器来申请和释放内存块。RT-Thread 支持多种内存管理策略,包括固定大小内存块池、堆内存管理等。
-
设备驱动框架(Device Driver Framework):提供了统一的设备驱动接口,使应用程序可以方便地访问各种硬件设备。RT-Thread 的设备驱动框架支持字符设备、块设备、网络设备、GPIO 设备等多种设备类型,并提供了相应的设备驱动接口函数。
-
通信机制:RT-Thread 提供了多种线程间通信的机制,包括信号量(Semaphore)、邮箱(Mailbox)、互斥锁(Mutex)、事件(Event)等。这些机制可以帮助不同线程之间进行同步和通信,实现数据的安全共享和协作处理。
-
定时器(Timer):用于定时触发某个特定的事件,在 RT-Thread 中,定时器可以用来延时执行任务、周期性地触发某个操作、定时检测任务等。
-
文件系统(File System):RT-Thread 支持多种文件系统,包括 FAT 文件系统和 YAFFS2 文件系统,应用程序可以通过文件系统接口对文件进行读写和管理。
-
系统时钟(System Clock):RT-Thread 提供了系统时钟管理的功能,可以配置系统的时钟源、时钟频率和中断处理等。通过系统时钟功能,可以实现精确的时间控制和时间片计算。
这些内核组件提供了丰富的功能和接口,使得开发者可以构建灵活、高效的嵌入式应用程序。具体的使用方法和详细介绍可以参考 RT-Thread 的官方文档和相应的模块代码。
2.2 API
RT-Thread 是一款开源的嵌入式实时操作系统(RTOS),提供了多个内核组件和 API,用于开发嵌入式系统的各个方面。以下是一些常用的 RT-Thread 内核组件和相应的 API:
-
线程管理(Thread):RT-Thread 提供了一套完整的线程管理机制,使用 API 可以创建、删除和控制线程的运行。常用的 API 有:
rt_thread_create():创建一个线程并指定其执行函数、优先级等参数。rt_thread_delete():删除一个线程。rt_thread_startup():启动一个线程使其开始运行。rt_thread_yield():主动放弃当前线程的执行权。
-
信号量(Semaphore):RT-Thread 提供了信号量机制,用于实现线程之间的同步和互斥。常用的 API 有:
rt_sem_init():初始化一个信号量。rt_sem_take():获取一个信号量,如果信号量计数为 0,则阻塞等待。rt_sem_release():释放一个信号量,增加信号量的计数。
-
互斥锁(Mutex):RT-Thread 提供了互斥锁机制,用于实现线程之间的互斥访问。常用的 API 有:
rt_mutex_init():初始化一个互斥锁。rt_mutex_take():获取一个互斥锁,如果锁被占用,则阻塞等待。rt_mutex_release():释放一个互斥锁。
-
邮箱(Mailbox):RT-Thread 提供了邮箱机制,用于线程之间的消息传递。常用的 API 有:
rt_mb_init():初始化一个邮箱。rt_mb_send():向邮箱发送一条消息。rt_mb_recv():从邮箱接收一条消息,如果邮箱为空,则阻塞等待。
-
定时器(Timer):RT-Thread 提供了定时器机制,用于定时触发特定的操作。常用的 API 有:
rt_timer_create():创建一个定时器。rt_timer_start():启动一个定时器。rt_timer_stop():停止一个定时器。
-
内存管理(Memory):RT-Thread 提供了内存管理的 API,用于动态分配和释放内存。常用的 API 有:
rt_malloc():动态分配内存。rt_free():释放动态分配的内存。
除了上述内核组件和 API,RT-Thread 还提供了许多其他组件和 API,如设备驱动、文件系统、网络协议栈等,以满足不同应用场景的需求。
需要注意的是,在使用 RT-Thread 的内核组件和 API 时,需要参考 RT-Thread 官方文档,并按照相关的编程规范进行正确的调用和处理,以确保系统的稳定性和可靠性。
三、设备驱动
3.1 概述
RT-Thread 提供了一个灵活且易用的设备驱动框架,用于开发和管理各种硬件设备的驱动。该框架旨在简化设备驱动的开发流程,提高设备驱动的可复用性和可移植性。以下是 RT-Thread 设备驱动框架的一些重要概念和组件:
-
设备结构体(struct device):RT-Thread 设备驱动框架使用结构体来表示设备。设备结构体包含了设备的名称、类型、状态等信息,并通过函数指针提供了设备操作的接口函数。
-
设备驱动注册(rt_device_register):设备驱动注册是将设备与设备驱动程序关联起来的过程。通过调用
rt_device_register函数,可以将设备结构体和相应的设备驱动程序进行关联,并将设备注册到 RT-Thread 设备驱动框架中。 -
设备操作函数(read、write、control 等):设备操作函数是设备驱动程序中定义的用于操作设备的函数,如读取设备数据、写入设备数据、设备控制等。设备操作函数是通过设备结构体中的函数指针进行调用的。
-
设备号(dev_num):设备号是用于唯一标识设备的数字或符号,可以通过设备号来唯一地识别和访问设备。
-
设备管理(rt_device_open、rt_device_close):设备管理函数负责设备的打开和关闭操作。通过调用
rt_device_open函数,可以打开设备并准备开始设备操作;通过调用rt_device_close函数,可以关闭设备并释放相关资源。 -
设备文件系统(Device Filesystem):RT-Thread 提供了设备文件系统(设备文件描述符)来统一管理设备的访问。应用程序可以通过打开和关闭设备文件描述符来访问设备。
RT-Thread 设备驱动框架还支持许多其他特性,如设备的中断处理、DMA(直接内存访问)支持、设备电源管理等。开发者可以根据具体的硬件设备的需求,使用 RT-Thread 设备驱动框架来实现相应的设备驱动程序。
关于 RT-Thread 设备驱动框架的更详细的说明和使用方法,您可以参考 RT-Thread 官方文档和相应的示例代码。
3.2 API
RT-Thread 提供了丰富的设备驱动组件和相应的 API,用于与外部设备进行交互和控制。以下是一些常用的 RT-Thread 设备驱动组件和 API:
-
设备框架(Device Framework):RT-Thread 的设备驱动基于设备框架,通过统一的设备接口封装了各种设备的驱动。开发者可以根据设备框架提供的 API 进行设备的注册、打开、关闭和读写等操作。
-
串口驱动(UART):RT-Thread 提供了串口设备的驱动接口,用于与外部设备进行串口通信。常用的串口驱动 API 有:
rt_device_register():注册一个串口设备。rt_device_open():打开一个串口设备。rt_device_read():从串口设备读取数据。rt_device_write():向串口设备写入数据。
-
SPI 驱动:RT-Thread 提供了 SPI 设备的驱动接口,用于与外部设备进行 SPI 通信。常用的 SPI 驱动 API 有:
rt_device_register():注册一个 SPI 设备。rt_device_open():打开一个 SPI 设备。rt_device_read():从 SPI 设备读取数据。rt_device_write():向 SPI 设备写入数据。
-
I2C 驱动:RT-Thread 提供了 I2C 设备的驱动接口,用于与外部设备进行 I2C 通信。常用的 I2C 驱动 API 有:
rt_device_register():注册一个 I2C 设备。rt_device_open():打开一个 I2C 设备。rt_device_read():从 I2C 设备读取数据。rt_device_write():向 I2C 设备写入数据。
-
GPIO 驱动:RT-Thread 提供了 GPIO 设备的驱动接口,用于控制和读取外部设备的 GPIO 引脚。常用的 GPIO 驱动 API 有:
rt_device_register():注册一个 GPIO 设备。rt_device_open():打开一个 GPIO 设备。rt_device_control():控制 GPIO 设备的输入输出状态。
上述只是一些常见的设备驱动组件和 API,RT-Thread 还提供了其他许多设备驱动,如网络设备驱动、文件系统驱动等,以满足不同的应用需求。
需要根据具体的硬件和应用需求,在 RT-Thread 官方文档中查找相应的设备驱动组件和 API 的具体使用方法和接口说明。
四、通信组件
4.1 概述
RT-Thread 提供了多个通信组件,用于实现线程间的消息传递与通信。以下是一些常用的 RT-Thread 通信组件:
-
消息队列(Message Queue):消息队列用于实现线程间的异步消息传递。它可以存储多个消息,每个消息可以是不同的数据类型。线程可以通过发送和接收消息来进行通信。RT-Thread 提供了
rt_mq_create()、rt_mq_send()和rt_mq_recv()等函数来创建消息队列,发送和接收消息。 -
邮箱(Mailbox):邮箱也可以实现线程间的消息传递与通信。每个邮箱可以存储一个数据类型的消息。发送线程将消息发送到邮箱中,接收线程可以从邮箱中接收消息。RT-Thread 提供了
rt_mb_create()、rt_mb_send()和rt_mb_recv()等函数来创建邮箱,发送和接收消息。 -
信号量(Semaphore):信号量用于线程间的同步和互斥访问共享资源。一个线程可以通过等待信号量来阻塞自己,直到另一个线程释放信号量为止。RT-Thread 提供了
rt_sem_create()、rt_sem_take()和rt_sem_release()等函数来创建信号量,等待和释放信号量。 -
事件(Event):事件用于线程间的事件通知和等待。一个线程可以等待一个或多个事件的发生,另一个线程可以触发事件。RT-Thread 提供了
rt_event_create()、rt_event_send()和rt_event_recv()等函数来创建事件,发送和接收事件。
这些通信组件提供了不同的线程间通信方式,你可以根据实际的需求选择合适的组件来进行线程间的消息传递与通信。使用这些组件可以实现线程的同步、互斥访问共享资源、异步消息传递等功能,提高系统的灵活性和可靠性。
4.4 API
RT-Thread 提供了多种通信组件和相应的 API,用于在系统内部或与外部设备之间进行通信。以下是一些常用的 RT-Thread 通信组件和 API:
-
消息队列(Message Queue):用于在任务间传递消息的机制。常用的消息队列 API 有:
rt_mq_create():创建一个消息队列。rt_mq_send():发送一个消息到指定的消息队列。rt_mq_recv():从指定的消息队列中接收消息。rt_mq_control():控制消息队列的属性。
-
信号量(Semaphore):用于任务间共享资源的同步机制。常用的信号量 API 有:
rt_sem_create():创建一个信号量。rt_sem_take():获取一个信号量。rt_sem_release():释放一个信号量。
-
互斥锁(Mutex):用于任务间对共享资源的互斥访问的同步机制。常用的互斥锁 API 有:
rt_mutex_create():创建一个互斥锁。rt_mutex_take():获取一个互斥锁。rt_mutex_release():释放一个互斥锁。
-
事件标志组(Event Flag):用于任务间同步和事件通知的机制。常用的事件标志组 API 有:
rt_event_init():初始化一个事件标志组。rt_event_send():发送事件给指定的任务。rt_event_recv():等待并接收指定的事件。
-
邮箱(Mailbox):用于在任务间传递数据的机制。常用的邮箱 API 有:
rt_mb_create():创建一个邮箱。rt_mb_send():发送数据到指定的邮箱。rt_mb_recv():从指定的邮箱中接收数据。
上述只是一些常用的通信组件和 API,RT-Thread 还提供了其他许多通信机制,如线程间通信、信号量组、事件组等,以满足不同的应用需求。
五、网络组件
5.1 概述
RT-Thread 提供了一系列网络组件,用于在嵌入式系统中实现网络通信功能。以下是一些常用的 RT-Thread 网络组件:
-
TCP/IP 协议栈:RT-Thread 集成了完整的 TCP/IP 协议栈,包括 IP、TCP、UDP、ICMP 等协议,可以实现基于 TCP/IP 的网络通信。它提供了接口函数和配置选项,可以根据需要进行定制和扩展。
-
LwIP(Lightweight IP):LwIP 是一种轻量级的嵌入式 TCP/IP 协议栈,RT-Thread 集成了 LwIP,并提供了与 RT-Thread 内核的接口,方便使用。LwIP 具有小巧、可移植和高效的特点,适合资源受限的嵌入式系统。
-
网络设备驱动:RT-Thread 提供了一系列的网络设备驱动,用于支持不同网络接口的通信。例如,Ethernet 驱动器用于支持以太网接口,Wi-Fi 驱动器用于支持无线网络接口。这些驱动程序提供了接口函数和配置选项,可以根据具体硬件进行配置和适配。
-
MQTT(MQ Telemetry Transport):MQTT 是一种轻量级的物联网通信协议,RT-Thread 提供了 MQTT 客户端库,用于连接和通信 MQTT 代理服务器。通过 MQTT,可以实现设备间的实时通信和发布/订阅模式的数据传输。
-
HTTP/HTTPS:RT-Thread 提供了 HTTP 和 HTTPS 客户端库,用于实现与 Web 服务器的通信。可以使用 HTTP/HTTPS 客户端库进行网页浏览、数据上传和下载等操作。
-
Socket API:RT-Thread 提供了类似于标准 Socket API 的网络编程接口,可以使用该 API 进行基于 TCP/IP 的网络编程,如创建套接字、发送和接收数据等。
通过这些网络组件,可以在 RT-Thread 上实现各种网络应用,如远程控制、数据采集、远程更新等。具体使用时,可以根据实际需求选择合适的网络组件,并进行相应的配置和调试。
5.2 API
RT-Thread 提供了一系列网络组件和相应的 API,用于支持网络通信和网络协议的实现。以下是一些常用的 RT-Thread 网络组件和 API:
-
网络协议栈(LwIP):RT-Thread 默认使用 LwIP(轻量级 IP 协议栈)作为网络协议栈,用于处理 TCP/IP 网络通信。LwIP 提供了丰富的 API,开发者可以使用这些 API 构建 TCP/IP 应用。常用的 LwIP API 有:
netconn_new():创建一个新的网络连接。netconn_bind():将网络连接绑定到指定的 IP 地址和端口。netconn_listen():开始监听指定的网络连接。netconn_accept():接受一个新的连接请求。netconn_send():向网络连接发送数据。netconn_recv():从网络连接接收数据。
-
Socket API:除了 LwIP,RT-Thread 还支持标准的 Socket API,用于实现基于 TCP/IP 的网络通信。常用的 Socket API 有:
socket():创建一个套接字。bind():将套接字绑定到指定的 IP 地址和端口。listen():开始监听套接字。accept():接受一个新的连接请求。send():向套接字发送数据。recv():从套接字接收数据。
-
MQTT(Message Queuing Telemetry Transport):RT-Thread 提供了 MQTT 客户端库,用于实现 MQTT 协议的消息发布和订阅。常用的 MQTT API 有:
mqtt_client_create():创建一个 MQTT 客户端。mqtt_connect():连接到指定的 MQTT 服务器。mqtt_publish():发布一个 MQTT 消息。mqtt_subscribe():订阅一个 MQTT 主题。mqtt_unsubscribe():取消订阅一个 MQTT 主题。
-
HTTP 客户端:RT-Thread 提供了 HTTP 客户端组件,用于实现 HTTP 协议的客户端功能。常用的 HTTP 客户端 API 有:
httpc_get():发送一个 HTTP GET 请求。httpc_post():发送一个 HTTP POST 请求。httpc_put():发送一个 HTTP PUT 请求。httpc_delete():发送一个 HTTP DELETE 请求。
上述只是一些常用的网络组件和 API,RT-Thread 还提供了其他许多网络相关的组件和协议支持,如 UDP、DHCP、DNS 等,以满足不同的网络应用需求。
5.3 补充:MQTT协议
MQTT(Message Queuing Telemetry Transport)是一种轻量级的、发布订阅模式的消息传输协议,专门用于传输物联网设备之间的实时数据。以下是 MQTT 的一些基本概念:
-
客户端(Client):MQTT 协议中的通信实体,可以是发布者、订阅者或同时兼具两者的设备。
-
代理(Broker):MQTT 网络中的服务器,负责接收和转发消息。
-
主题(Topic):MQTT 消息的分类标识,用于订阅和发布消息。
-
发布者(Publisher):将消息发布到指定主题的客户端。
-
订阅者(Subscriber):订阅特定主题的客户端,可以接收到发布者发送的消息。
在 MQTT 中,客户端可以通过订阅主题来接收感兴趣的消息,也可以通过发布消息到特定主题来将数据发送给订阅者。以下是一些 MQTT 的基本操作:
-
连接(Connect):客户端连接到 MQTT 代理。
-
订阅(Subscribe):客户端向代理订阅一个或多个主题。
-
取消订阅(Unsubscribe):客户端取消订阅一个或多个已订阅的主题。
-
发布(Publish):客户端向指定的主题发布消息。
-
接收(Receive):订阅者接收到发布者发送的消息。
MQTT 协议具有轻量级、低带宽消耗、支持异步通信等特点,适用于资源有限的物联网设备和网络环境。它已被广泛应用于物联网领域,用于设备与设备之间的实时数据传输和通信。
六、文件系统
6.1 概述
RT-Thread 提供了多个文件系统组件,用于在嵌入式系统中实现文件管理和存储功能。以下是一些常用的 RT-Thread 文件系统组件:
-
FAT 文件系统(FATFS):FATFS 是一种常用的文件系统,RT-Thread 提供了对 FATFS 的支持。它能够在嵌入式系统中实现对 SD 卡、FLASH 存储器等存储介质的文件读写和管理。通过使用 FATFS,可以实现文件的创建、删除、读写、移动等操作。
-
ROM 文件系统(ROMFS):ROMFS 是一种只读文件系统,适用于小型系统或只需要读取文件的应用场景。RT-Thread 提供了对 ROMFS 的支持,可以将文件系统镜像固化在系统的只读存储介质中,以提供文件的读取功能。
-
YAFFS 文件系统:YAFFS(Yet Another Flash File System)是一种专为嵌入式系统设计的闪存文件系统。RT-Thread 提供了对 YAFFS 的支持,可以在嵌入式系统中实现对 NAND FLASH 等闪存设备的文件读写和管理。
-
SPIFFS 文件系统:SPIFFS 是一种适用于闪存设备的嵌入式文件系统,它以较低的存储占用和较快的读写速度著称。RT-Thread 提供了对 SPIFFS 的支持,可以在具有 SPI 接口的闪存设备上实现文件读写和管理。
除了上述文件系统组件,RT-Thread 还提供了文件操作相关的接口函数,如文件打开、关闭、读写等,以及目录操作的接口函数,如目录打开、读取、关闭等。这些接口函数可以方便地进行文件和目录的操作。
需要注意的是,文件系统组件需要根据实际需求进行配置和编译,以适配具体的硬件和存储设备。在使用文件系统时,还需要根据文件系统的特性和限制进行合理的使用和管理,以确保文件数据的完整性和一致性。
6.2 API
RT-Thread 提供了多个文件系统组件,用于在嵌入式系统中实现文件系统的功能。以下是一些常用的 RT-Thread 文件系统组件和相应的 API:
-
FAT 文件系统(FFS):RT-Thread 中的默认文件系统,支持 FAT12、FAT16 和 FAT32 格式。它提供了类似于标准 C 文件 API 的一组函数,用于打开、关闭、读取、写入和删除文件等操作。常用的 FFS API 有:
ffs_mount():挂载 FAT 文件系统。ffs_unmount():卸载 FAT 文件系统。ffs_open():打开文件。ffs_close():关闭文件。ffs_read():读取文件内容。ffs_write():写入文件内容。ffs_remove():删除文件。
-
YAFFS 文件系统:RT-Thread 还支持 YAFFS(Yet Another Flash File System)文件系统,用于在闪存设备上存储和管理文件。YAFFS 提供了一组 API 用于对文件进行读写、删除和修改等操作,包括:
yaffs_mount():挂载 YAFFS 文件系统。yaffs_unmount():卸载 YAFFS 文件系统。yaffs_open():打开文件。yaffs_close():关闭文件。yaffs_read():读取文件内容。yaffs_write():写入文件内容。yaffs_remove():删除文件。
-
LittleFS 文件系统:RT-Thread 还支持 LittleFS 文件系统,一个针对嵌入式系统设备的小型、高效的文件系统。LittleFS 提供了一组类似于 POSIX 文件 API 的函数,用于文件的读写操作。常用的 LittleFS API 有:
lfs_mount():挂载 LittleFS 文件系统。lfs_unmount():卸载 LittleFS 文件系统。lfs_open():打开文件。lfs_close():关闭文件。lfs_read():读取文件内容。lfs_write():写入文件内容。lfs_remove():删除文件。
除了上述文件系统组件,RT-Thread 还支持其他一些文件系统,如 TFFS(Tiny Flash File System)、ROMFS(只读文件系统)等。开发者可以根据具体的应用需求选择适合的文件系统来进行文件管理和存储操作。
七、GUI 组件
7.1 概述
RT-Thread 提供了一系列 GUI(图形用户界面)组件,用于在嵌入式系统中实现图形界面显示和交互。以下是一些常用的 RT-Thread GUI 组件:
-
图形核心(Graphic Core):RT-Thread 提供了图形核心,用于管理和绘制界面元素。它提供了屏幕缓冲区、绘图函数、颜色管理等功能,可以实现界面元素的绘制、更新和刷新。
-
控件库(Widget Library):RT-Thread 提供了一系列预定义的控件,如按钮、标签、文本框、进度条、列表框等。这些控件可以快速构建图形界面,实现用户与系统的交互。
-
绘图库(Graphics Library):RT-Thread 提供了绘图库,支持基本的图形绘制功能,如直线、矩形、圆形等。它可以用于自定义控件的绘制,以及实现特殊效果和动画等功能。
-
字体库(Font Library):RT-Thread 提供了多种字体库,支持不同的字体类型和大小。可以根据需要选择合适的字体,用于显示文本内容。
-
触摸屏驱动(Touch Screen Driver):RT-Thread 提供了触摸屏驱动支持,可以实现触摸操作的捕捉和解析。通过触摸屏驱动,可以实现用户在界面上的触摸操作,如点击、滑动等。
-
动画库(Animation Library):RT-Thread 提供了动画库,支持多种动画效果,如淡入淡出、平移、缩放等。可以使用动画库为界面添加动态效果,增强用户体验。
需要注意的是,GUI 组件需要根据实际需求进行配置和使用。在使用 GUI 组件时,还需要根据硬件平台的特性和资源情况,选择合适的图形显示驱动和外设接口。此外,GUI 组件的使用也需要考虑系统资源占用和性能消耗等方面的因素,以保证系统的稳定和响应速度。
综上所述,通过使用 RT-Thread 提供的 GUI 组件,可以在嵌入式系统中实现丰富的图形用户界面和交互功能。
7.2 API
RT-Thread 提供了多个 GUI(图形用户界面)组件,用于嵌入式系统中实现界面显示和交互功能。以下是一些常用的 RT-Thread GUI 组件和相应的 API:
-
GUI Core(guicore):GUI 核心组件提供了基本的绘图和界面管理功能,包括窗口管理、界面刷新、坐标系转换等。常用的 GUI Core API 有:
gui_init():初始化 GUI 系统。gui_draw_line():绘制直线。gui_draw_rectangle():绘制矩形。gui_draw_circle():绘制圆形。gui_set_color():设置画笔颜色。gui_set_font():设置字体。gui_get_pixel():获取指定坐标点的颜色值。gui_refresh():刷新界面。
-
Label(label):Label 组件用于显示文本内容,支持字体、颜色、对齐方式等参数设置。常用的 Label API 有:
label_create():创建 Label 组件。label_set_text():设置文本内容。label_set_font():设置字体。label_set_color():设置文本颜色。
-
Button(button):Button 组件用于创建按钮,支持按键事件响应和状态切换等功能。常用的 Button API 有:
button_create():创建 Button 组件。button_set_text():设置按钮文本内容。button_set_click_event():设置按钮点击事件回调函数。
-
Checkbox(checkbox):Checkbox 组件用于创建复选框,支持选中状态切换和事件回调等功能。常用的 Checkbox API 有:
checkbox_create():创建 Checkbox 组件。checkbox_set_text():设置复选框文本内容。checkbox_set_checked():设置复选框选中状态。checkbox_set_changed_event():设置复选框状态改变事件回调函数。
-
List(list):List 组件用于创建列表,支持滚动显示和选中项操作等功能。常用的 List API 有:
list_create():创建 List 组件。list_add_item():添加列表项。list_set_selected():设置选中项。list_get_selected():获取选中项。
这些是 RT-Thread 中常用的 GUI 组件和相应的 API,开发者可以根据具体需求选择适合的组件来构建用户界面。RT-Thread 还提供了更多的 GUI 组件和功能,可以在 RT-Thread 官方文档中查找更详细的信息

![[ai笔记9] openAI Sora技术文档引用文献汇总](https://img-blog.csdnimg.cn/img_convert/1933948207ead662e694f9205b5a3f3a.png)