最近有上传一些入门的免积分的资料,方便大家上手进行仿真分析。注意查收。还在继续更新中。
继续回到咱们的电机控制系列模块解析(第六篇)—— 观测器
1、无位置传感器控制背景
这方面的文献比较多,直接引用一些文献里的背景知识:
无论在传动系统中的永磁同步电动机是采用矢量控制、直接转矩控制或是其它控制方法,电机的速度和转子的磁极位置信息是必不可少的,这一般是利用光电编码器或者旋转变压器等机械传感器来采集相关信息,在实际应用中会带来以下一系列问题:
传感器的轴向长度在永磁电机的整个轴向长度中会占一定比例,这就加大了电机的轴向空间尺寸和体积,提高了电机成本。对于一些小容量、低成本永磁无刷电机驱动系统中,使用高精度、高响应的速度或位置传感器将显著增加系统的安装和维护成本。
机械传感器安装必须考虑同心度问题,任何安装不当将影响测量精度,而且与电机同轴相连会对电机的驱动轴产生一定程度摩擦,改变了系统静动态特性,同时增加了电机转子轴上的转动惯量。
机械传感器中都带有信号解码电路和连接电缆,例如位置检测转换电路、通讯电路等,永磁同步电动机经常性运行在恶劣环境中,这就使得电路及电缆极易受到高温、潮湿及电磁干扰等因素的影响,破坏了传感器的精确度,降低了可靠性,这要求研发人员必须考虑传感器失效下运行情况。
为克服使用机械传感器带来的一系列缺陷,研究人员开发出一种新的无传感器控制技术,这种技术是利用电机绕组中变量如定子电流、定子电压等来估算转子位置和速度,由于具有高可靠性、低成本特点,可以替代传统电机传动系统中的机械传感器,一经推出就迅速成为电机控制技术领域的研究热点。
2、无位置传感器控制算法
这方面内容后续还会继续介绍,在这里先开始一点简单的综述,然后从最简单的观测器开始入手来熟悉电机控制中的无位置传感器控制算法。
2.1 综述
无位置传感器控制算法主要应用于电机控制系统中,当没有物理位置传感器(如霍尔效应传感器、光电编码器等)时,通过其他方法估计电机转子的位置。以下是一些常见的无位置传感器控制算法:
-
反电动势检测法:当电机启动或改变运行状态时,定子绕组会产生反电动势。通过对三相电压信号进行处理,可以提取出与转子位置相关的正弦和余弦分量,从而确定转子的绝对或相对位置。
-
滑模观测器(SMO, Sliding Mode Observer):滑模观测器利用电机数学模型以及电压和电流测量值,构建一个非线性系统,设计适当的切换函数使得系统在滑动面上稳定工作,从系统的动态响应中推算出转子位置信息。
-
扩展卡尔曼滤波器(EKF, Extended Kalman Filter):EKF是一种基于概率论的最优估计方法,它将电机视为非线性动态系统,结合电机模型和噪声模型,通过迭代过程实时更新对转子位置和速度的估计。
-
模型参考自适应系统(MRAS, Model Reference Adaptive System):MRAS方法采用两个模型:一个是实际电机模型,另一个是可调参数的参考模型。通过比较这两个模型的输出差异并调整参考模型的参数,以使两者输出尽可能一致,从而得到转子位置的估计值。
-
高频注入法:通过向电机施加高频正弦波或脉冲序列,并分析由此产生的反电动势信号特征,根据其变化规律来估算转子位置。
-
电感估计算法:根据电机定子绕组电感随转子位置变化的特性,通过对定子绕组施加特定频率的交流信号,测量响应电流,从而推断转子位置。
-
磁链观测器:利用电机磁链方程建立观测器,结合电流和电压信号,通过计算求解磁链的变化进而获取转子位置信息。
每种方法都有其优缺点和适用范围,选择哪种算法取决于具体的应用场景、电机类型、控制精度要求及硬件资源等因素。
紧接着,说明一下以上各个方法的优缺点:
1、滑模控制器和观测器是一种误差趋近手段,不同的滑模面函数决定了其误差收敛的不同过程,滑模增益的自适应和滑模方程阶数的增加是滑模两个主要发展方向;
2、模型参考自适应归为自适应控制领域,可根据稳定性分析选择不同的自适应律;
3、智能算法对硬件要求较高,而其稳定性难以证明,且需要一定训练和先验知识。
4、工程上反电势观测器和磁链观测器作为主流基波观测器,有较多细节需深入研究,诸如角度估计、转速估计、参数鲁棒性、偏差校正增益、低通滤波器参数等等。
5、高频注入观测器依赖电机类型,一般要求凸极比大于1.5(为重载磁饱和问题留有一定裕量)IPM(或者同步磁阻电机)才应用高频注入观测器,且高频注入法的注入电压和注入频率仍依赖IPM电机(或者同步磁阻电机)参数,对于中大功率的电机还有高频噪声问题的存在。
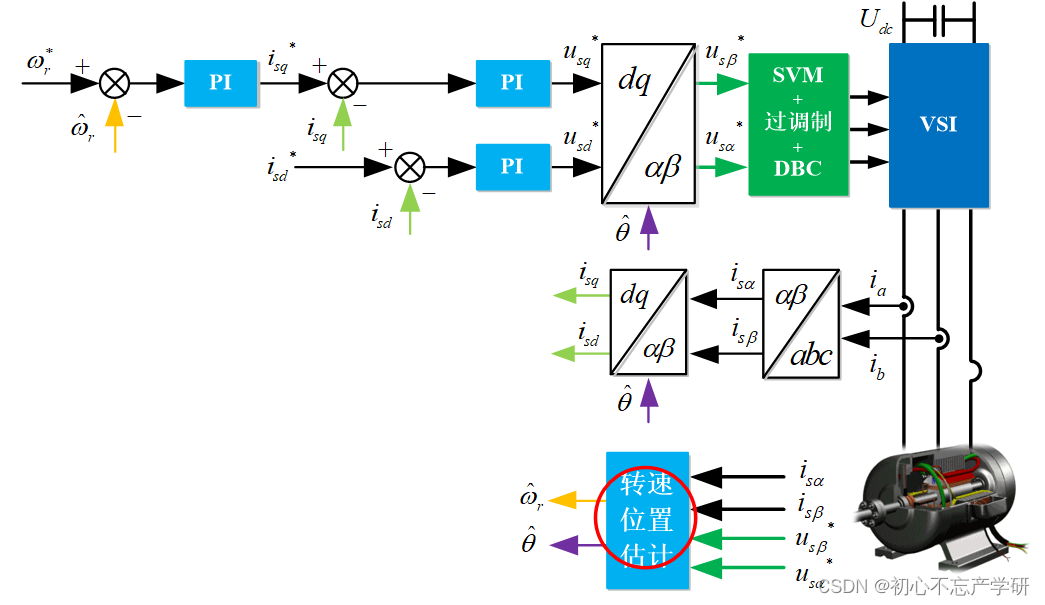
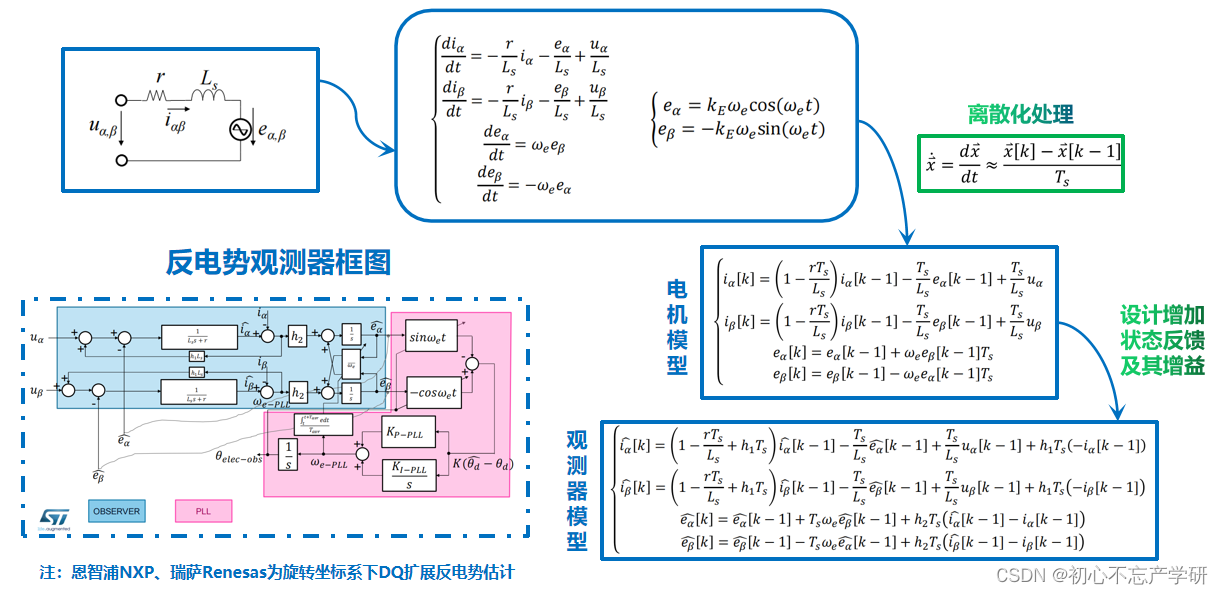
2.2 反电势观测器
基波观测器主要分为反电势观测器和磁链观测器两种。
反电势观测器(Back Electromotive Force, BEMF Observer)是一种用于无位置传感器电机控制的算法,它通过分析电机内部产生的反电动势信号来估计电机转子的位置信息。在永磁同步电机(PMSM)、无刷直流电机(BLDC)等应用中,通常需要实时知道转子的位置以进行精确的磁场定向控制(FOC)。
反电势是当电机旋转时,由于电磁感应原理在定子绕组中自然产生的电压。这个电压与转子的位置和速度直接相关。反电势观测器的工作原理主要包括以下步骤:
电流检测:首先测量流入电机定子绕组的电流。
信号处理:对采集到的电压、电流信号进行坐标变化,将三相交流信号转换为两相静止直交坐标系(α-β 或 D-Q 坐标系)下的信号。
建立观测器模型:基于电机电气模型,设计一个动态系统,该系统能够根据已知的电流和电机参数估计出反电动势分量。
计算转子位置:从观测器得到的反电动势信号中解算(以锁相环为例,或者也可以直接arctan)出转子的位置信息(例如角度θ),并用作控制器中的反馈信号,实现无传感器的磁场定向控制。
总之,反电势观测器是一种重要的无传感器电机控制技术,它使得电机控制系统能够在不依赖昂贵且可能故障的物理位置传感器的情况下,依然能保持较高的控制精度和稳定性。
下面以大家比较熟悉的意法半导体的反电势观测器为例,框图来源于意法半导体的应用手册,这里我以图示的过程展示反电势观测器的公式推导。
2.3 磁链观测器
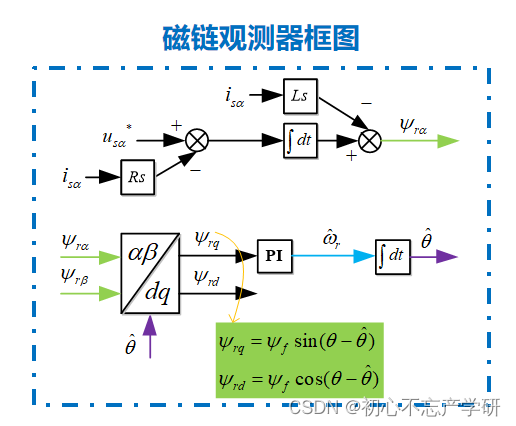
磁链观测器(Flux Observer)是一种用于电机控制的算法,它通过实时分析电机定子侧的电压和电流信号来估计电机内部的磁链值,进而确定转子的位置和速度信息。
在永磁同步电机中,由于永磁体的存在,会在电机内部产生恒定的磁链,这个磁链与转子的位置直接相关。磁链观测器的工作原理主要包括以下几个步骤:
电压和电流测量:首先,通过电流传感器获取流入电机定子绕组的三相电流信号,并结合电源施加到电机的电压信号。
坐标变换:将采集到的三相电压和电流信号转换为适合分析的坐标系。
构建观测器模型:基于电机数学模型构建观测器以实时估计磁链值。
转子位置和速度计算:从估计出的磁链信号中可以解算出转子相对于定子的角位置(以锁相环为例,或者也可以直接arctan),同时可估算出转子的速度。
磁链观测器对于实现高精度的FOC至关重要,它可以替代物理位置传感器,降低系统成本并提高系统的可靠性。
对比磁链观测器的不同形式:
1)静止坐标系下的磁链-电压方程;
2)旋转坐标系下的磁链-电流方程;
3)混合磁链-电压-电流模型;
4)非线性规划磁链方程;
5)有源磁链概念方程......
还有一些其他改进的磁链观测器后续继续进行解析。
但是即使是上图最普通的磁链观测器,在开发过程中,仍然有很多地方需要考虑,如下所述: