文章目录
- 开闭运算,腐蚀膨胀的亮点问题
- 灰度图像的开闭运算,腐蚀膨胀的亮点问题
- 算子
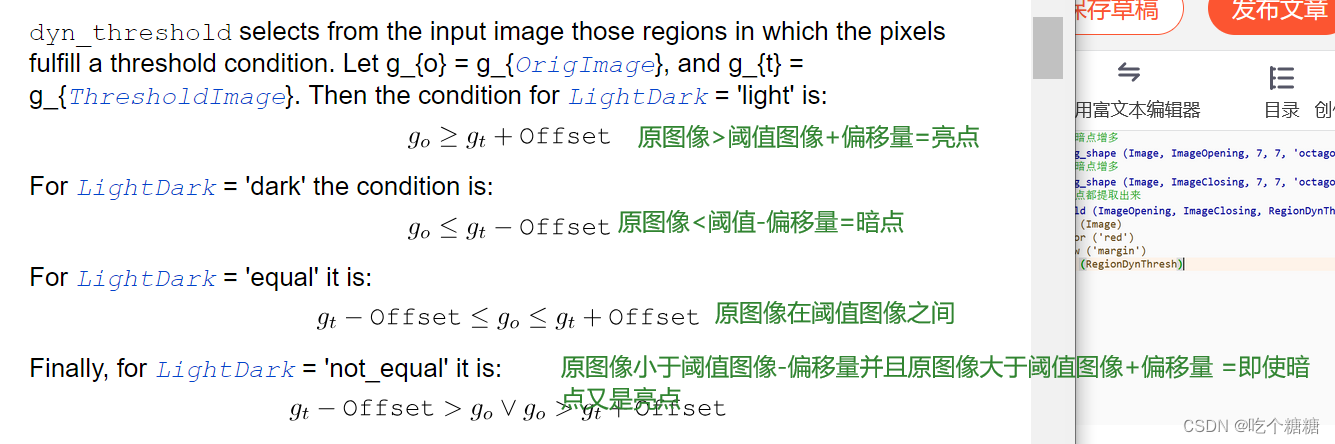
- 二值化算子
- Halcon blob+特征处理的方法检测缺陷
- Halcon Blob+特征+差分的方法检测缺陷
- Halcon 极坐标变换(环形先转换坐标)+blob+特征
- Halcon Blob+局部二值化+特征提取缺陷检测
- Halcon blob+灰度差分+特征缺陷检测案例
- Halcon 定位(blob求角度)+特征
- Halcon 定位(模板匹配)+测量
- Halcon 拟合方法的求缺陷
- Halcon OCV光学字符检测
- OCV 模板创建
- OCV 字符质量缺陷识别
- OCV 字符缺陷检测展示案例
开闭运算,腐蚀膨胀的亮点问题
开运算先进行腐蚀操作再进行膨胀操作,通常可以消除小的亮点(暗点变多)区域并使边缘更加清晰,因此亮点通常会减少。而闭运算先进行膨胀操作再进行腐蚀操作,可以填补亮点中间的空洞并使其更加连通,因此亮点通常会增多(暗点减少)。
腐蚀和膨胀也是形态学处理中常用的基本操作,它们分别可以缩小或消除亮点区域(腐蚀),或扩大或连接亮点区域(膨胀)。在进行开运算时,腐蚀操作会消除较小的亮点区域,膨胀操作会尝试连接亮点并填充它们之间的空隙;在进行闭运算时,膨胀操作会连接较小的亮点区域并填充它们之间的空隙,腐蚀操作会消除边缘部分使得亮点更加连通和光滑。
灰度图像的开闭运算,腐蚀膨胀的亮点问题
对于灰度图像进行开闭运算时,腐蚀和膨胀操作的影响与二值图像略有不同。在灰度图像中,腐蚀和膨胀操作会改变亮度值而不仅仅是亮点的数量。
在开运算中,先进行腐蚀操作再进行膨胀操作。腐蚀操作会使亮区域的亮度值降低,从而减小亮点的尺寸和强度(暗点变多)。然后,膨胀操作会试图恢复亮区域的亮度值,但由于先前的腐蚀操作的影响,亮点可能不会完全恢复到原始的尺寸和强度。因此,在灰度图像中进行开运算可能会导致亮点数量减少,并且亮点的尺寸和强度也可能减小。
相反,在闭运算中,先进行膨胀操作再进行腐蚀操作。膨胀操作会使亮区域的亮度值增加,从而增大亮点的尺寸和强度(暗点减少)。然后,腐蚀操作会试图消除边缘部分并使亮点更加连通和光滑。因此,在灰度图像中进行闭运算通常会导致亮点数量增多,并且亮点的尺寸和强度也可能增加。
算子
二值化算子
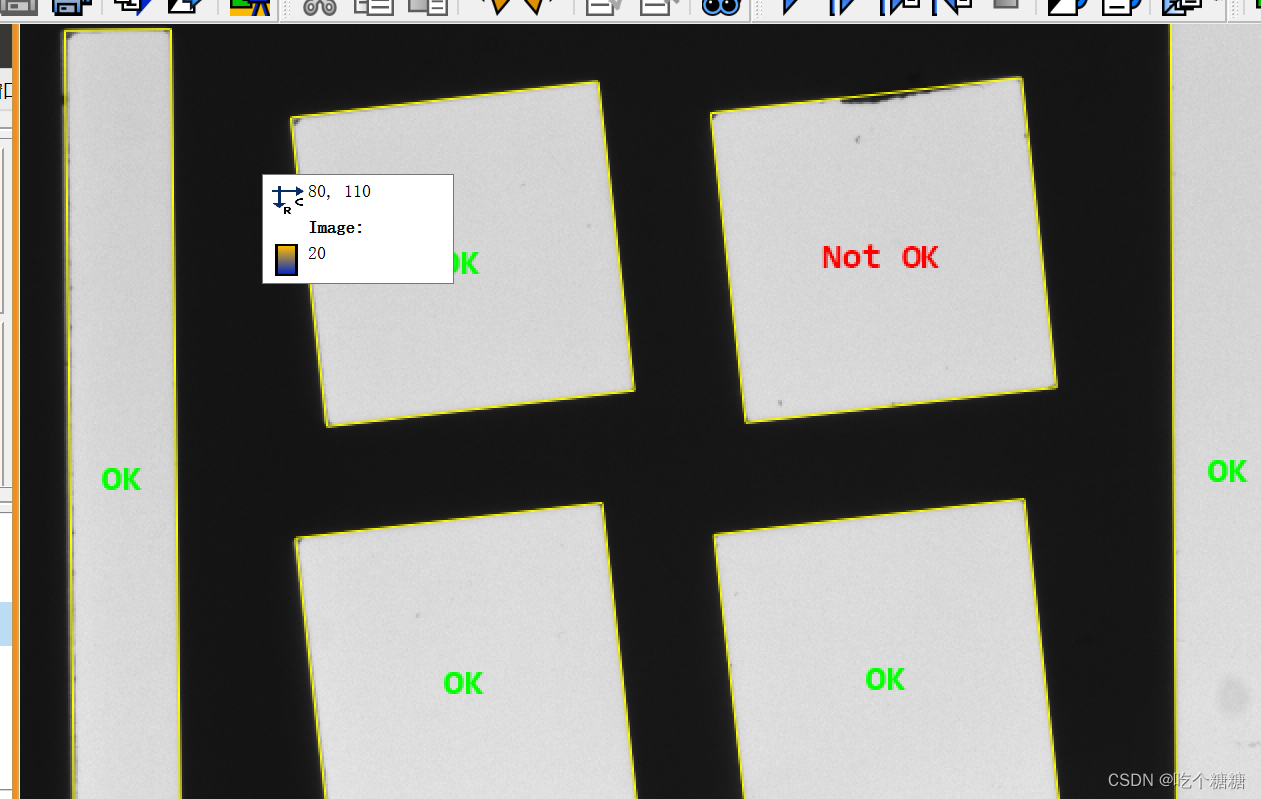
Halcon blob+特征处理的方法检测缺陷
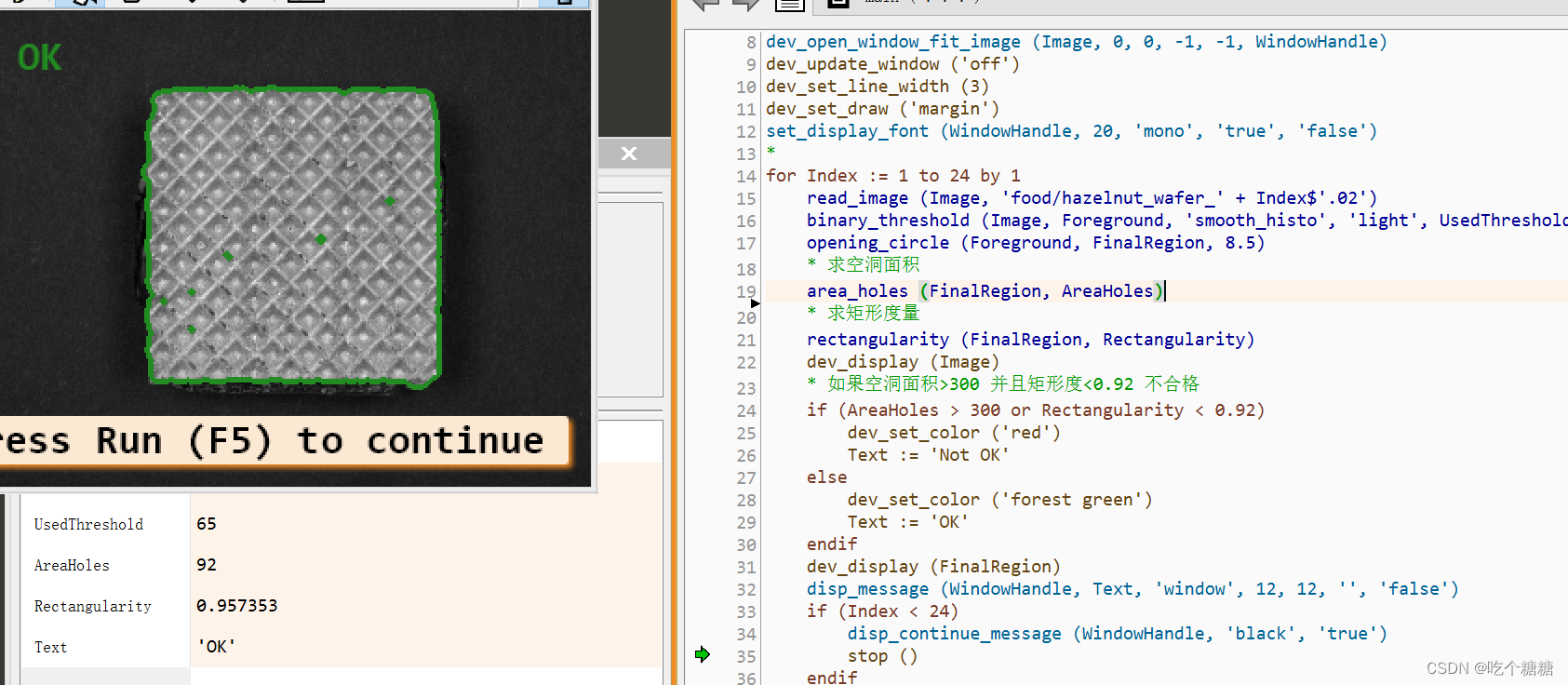
* This example demonstrates a quality inspection on hazelnut wavers.
* Using the morphology tools the waver is extracted and examined
* according to a few shape features like Rectangularity and AreaHoles.
* This program also shows the use of the operator area_holes.
*
read_image (Image, 'food/hazelnut_wafer_01')
dev_close_window ()
dev_open_window_fit_image (Image, 0, 0, -1, -1, WindowHandle)
dev_update_window ('off')
dev_set_line_width (3)
dev_set_draw ('margin')
set_display_font (WindowHandle, 20, 'mono', 'true', 'false')
*
for Index := 1 to 24 by 1
read_image (Image, 'food/hazelnut_wafer_' + Index$'.02')
binary_threshold (Image, Foreground, 'smooth_histo', 'light', UsedThreshold)
opening_circle (Foreground, FinalRegion, 8.5)
* 求空洞面积
area_holes (FinalRegion, AreaHoles)
* 求矩形度量
rectangularity (FinalRegion, Rectangularity)
dev_display (Image)
* 如果空洞面积>300 并且矩形度<0.92 不合格
if (AreaHoles > 300 or Rectangularity < 0.92)
dev_set_color ('red')
Text := 'Not OK'
else
dev_set_color ('forest green')
Text := 'OK'
endif
dev_display (FinalRegion)
disp_message (WindowHandle, Text, 'window', 12, 12, '', 'false')
if (Index < 24)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
Halcon Blob+特征+差分的方法检测缺陷
闭运算是先进行膨胀操作,再进行腐蚀操作,通常用于填充图像中的小孔洞或连接断开的区域。闭运算可以平滑和闭合图像中的对象边界。
开运算是先进行腐蚀操作,再进行膨胀操作,通常用于去除图像中的小尖峰或细小的对象。开运算可以平滑和消除图像中的噪点。
* fin.hdev: Detection of a fin
*
* 采集
dev_update_window ('off')
read_image (Fins, 'fin' + [1:3])
get_image_size (Fins, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width[0], Height[0], 'black', WindowID)
set_display_font (WindowID, 14, 'mono', 'true', 'false')
for I := 1 to 3 by 1
select_obj (Fins, Fin, I)
dev_display (Fin)
* 分割
*二值化
binary_threshold (Fin, Background, 'max_separability', 'light', UsedThreshold)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (4)
dev_display (Background)
disp_continue_message (WindowID, 'black', 'true')
stop ()
* 使用闭运算把圆形填充,先膨胀在腐蚀
closing_circle (Background, ClosedBackground, 250)
dev_set_color ('green')
dev_display (ClosedBackground)
disp_continue_message (WindowID, 'black', 'true')
stop ()
* 将闭运算得到的图像和原图像做差
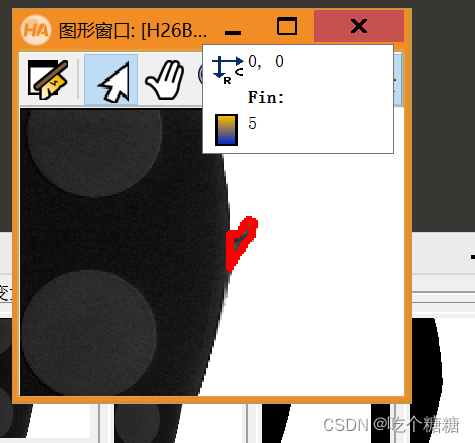
difference (ClosedBackground, Background, RegionDifference)
* 差值区域做开运算去除噪点,先腐蚀在鹏展
opening_rectangle1 (RegionDifference, FinRegion, 5, 5)
dev_display (Fin)
dev_set_color ('red')
dev_display (FinRegion)
* 特征提取
* 获取中心区域的面积,和行列坐标
area_center (FinRegion, FinArea, Row, Column)
if (I < 3)
disp_continue_message (WindowID, 'black', 'true')
stop ()
endif
endfor
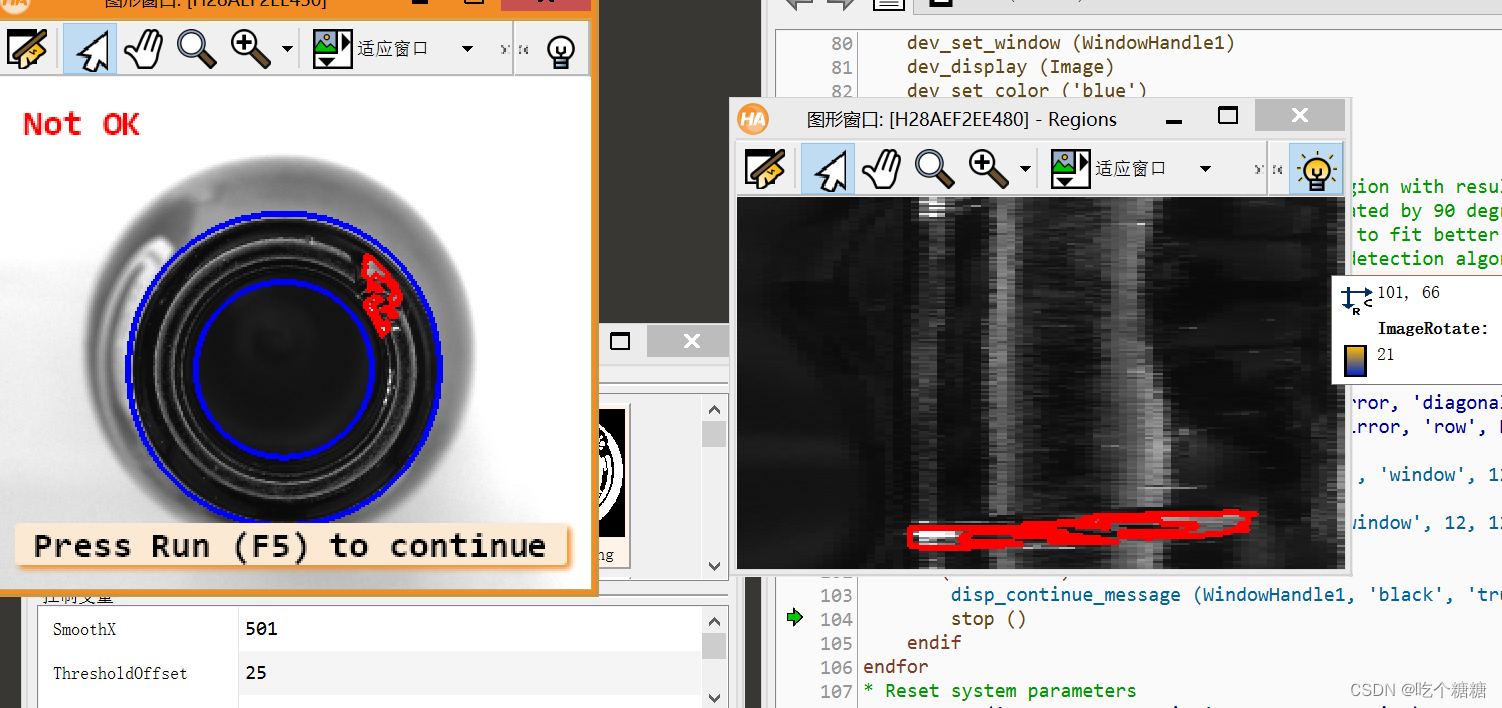
Halcon 极坐标变换(环形先转换坐标)+blob+特征
Halcon 圆环上orc字体识别
* This example checks bottle necks for defects.
* First, the bottle is detected with basic morphology,
* edge detection and circle fitting.
* Then, the neck area is transformed with a polar transformation.
* After that, in the transformed image a dynamic threshold is used
* to detect defects. Finally, the results are displayed.
*
*
* tuning parameters
SmoothX := 501
ThresholdOffset := 25
MinDefectSize := 50
*
* initialization
PolarResolution := 640
RingSize := 70
get_system ('store_empty_region', StoreEmptyRegion)
set_system ('store_empty_region', 'false')
read_image (Image, 'bottles/bottle_mouth_01')
dev_update_off ()
dev_close_window ()
dev_close_window ()
dev_open_window_fit_image (Image, 0, 0, 640, 512, WindowHandle1)
set_display_font (WindowHandle1, 16, 'mono', 'true', 'false')
dev_display (Image)
dev_set_draw ('margin')
dev_set_line_width (3)
dev_open_window_fit_size (0, 648, RingSize, PolarResolution, 150, 512, WindowHandle)
dev_set_draw ('margin')
dev_set_line_width (3)
dev_set_color ('red')
*
* Main loop
*
* Detect defects in bottle necks
for Index := 1 to 16 by 1
read_image (Image, 'bottles/bottle_mouth_' + Index$'.02')
*
* Part 1: Use basic morphology to detect bottle
auto_threshold (Image, Regions, 2)
select_obj (Regions, DarkRegion, 1)
opening_circle (DarkRegion, RegionOpening, 3.5)
closing_circle (RegionOpening, RegionClosing, 25.5)
fill_up (RegionClosing, RegionFillUp)
boundary (RegionFillUp, RegionBorder, 'outer')
dilation_circle (RegionBorder, RegionDilation, 3.5)
reduce_domain (Image, RegionDilation, ImageReduced)
*
* Find the bottle center by fitting a circle to extracted edges
edges_sub_pix (ImageReduced, Edges, 'canny', 0.5, 20, 40)
segment_contours_xld (Edges, ContoursSplit, 'lines_circles', 5, 4, 2)
union_cocircular_contours_xld (ContoursSplit, UnionContours, 0.9, 0.5, 0.5, 200, 50, 50, 'true', 1)
length_xld (UnionContours, Length)
select_obj (UnionContours, LongestContour, sort_index(Length)[|Length| - 1] + 1)
fit_circle_contour_xld (LongestContour, 'ahuber', -1, 0, 0, 3, 2, Row, Column, Radius, StartPhi, EndPhi, PointOrder)
*
* Part 2: Transform the ring-shaped bottle neck region to a rectangle
gen_circle (Circle, Row, Column, Radius)
dilation_circle (Circle, RegionDilation, 5)
erosion_circle (Circle, RegionErosion, RingSize - 5)
difference (RegionDilation, RegionErosion, RegionDifference)
reduce_domain (Image, RegionDifference, ImageReduced)
polar_trans_image_ext (ImageReduced, ImagePolar, Row, Column, 0, rad(360), Radius - RingSize, Radius, PolarResolution, RingSize, 'nearest_neighbor')
*
* Part 3: Find defects with a dynamic threshold
* Note the strong smoothing in x-direction in the transformed image.
scale_image_max (ImagePolar, ImageScaleMax)
mean_image (ImageScaleMax, ImageMean, SmoothX, 3)
dyn_threshold (ImageScaleMax, ImageMean, Regions1, 55, 'not_equal')
connection (Regions1, Connection)
select_shape (Connection, SelectedRegions, 'height', 'and', 9, 99999)
* ignore noise regions
closing_rectangle1 (SelectedRegions, RegionClosing1, 10, 20)
union1 (RegionClosing1, RegionUnion)
* re-transform defect regions for visualization
polar_trans_region_inv (RegionUnion, XYTransRegion, Row, Column, 0, rad(360), Radius - RingSize, Radius, PolarResolution, RingSize, 1280, 1024, 'nearest_neighbor')
*
* Part 4: Display results
* display original image with results
dev_set_window (WindowHandle1)
dev_display (Image)
dev_set_color ('blue')
dev_display (RegionDifference)
dev_set_color ('red')
dev_display (XYTransRegion)
* display polar transformed inspected region with results
* The image and resulting region are rotated by 90 degrees
* only for visualization purposes! (I.e. to fit better on the screen)
* The rotation is NOT necessary for the detection algorithm.
dev_set_window (WindowHandle)
rotate_image (ImagePolar, ImageRotate, 90, 'constant')
dev_display (ImageRotate)
count_obj (RegionUnion, Number)
if (Number > 0)
mirror_region (RegionUnion, RegionMirror, 'diagonal', PolarResolution)
mirror_region (RegionMirror, RegionMirror, 'row', PolarResolution)
dev_display (RegionMirror)
disp_message (WindowHandle1, 'Not OK', 'window', 12, 12, 'red', 'false')
else
disp_message (WindowHandle1, 'OK', 'window', 12, 12, 'forest green', 'false')
endif
if (Index < 16)
disp_continue_message (WindowHandle1, 'black', 'true')
stop ()
endif
endfor
* Reset system parameters
set_system ('store_empty_region', StoreEmptyRegion)
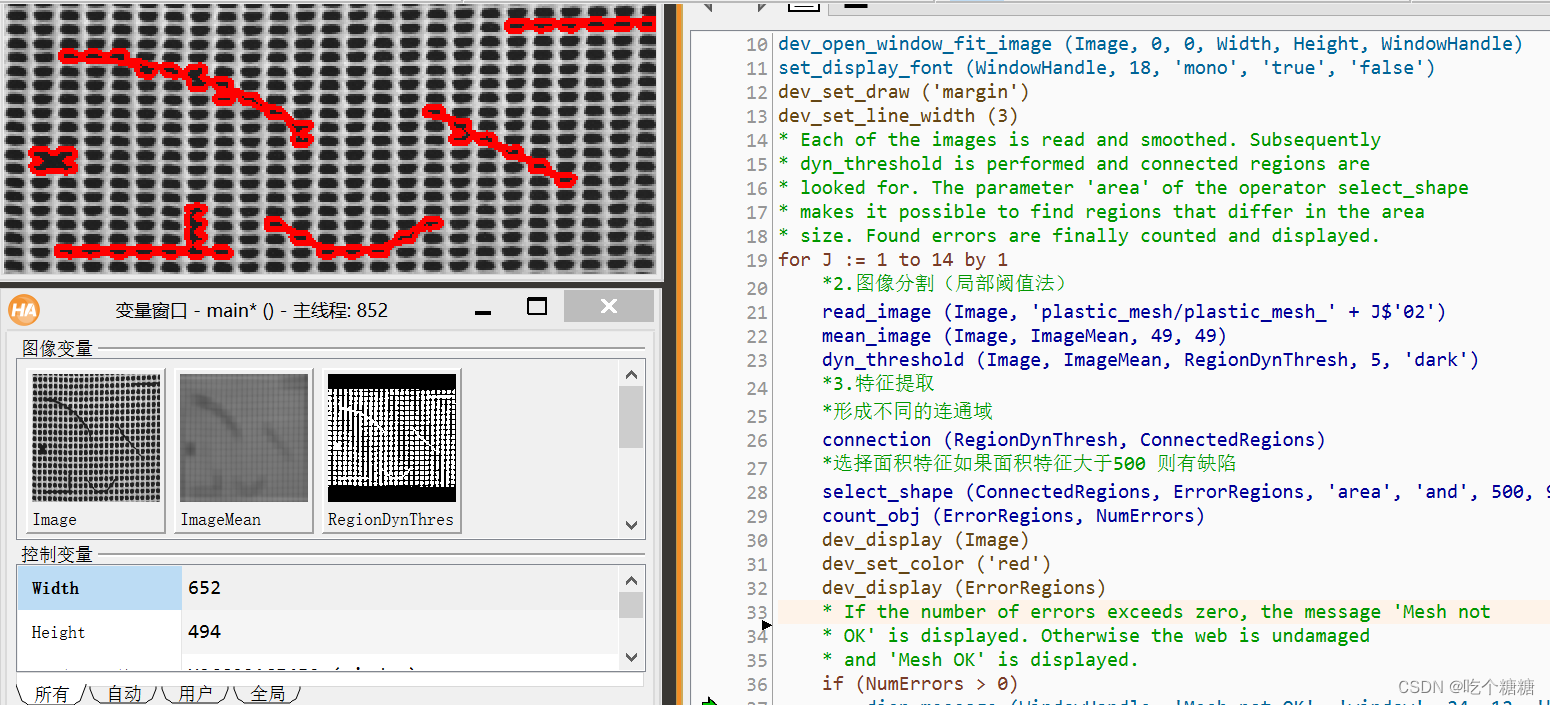
Halcon Blob+局部二值化+特征提取缺陷检测
* The task of this example is to detect defects on a
* web using the operator dyn_threshold. In this way,
* the operator can be used to find textures that
* differ from the rest of the image.
*1.采集图像
dev_update_window ('off')
read_image (Image, 'plastic_mesh/plastic_mesh_01')
dev_close_window ()
get_image_size (Image, Width, Height)
dev_open_window_fit_image (Image, 0, 0, Width, Height, WindowHandle)
set_display_font (WindowHandle, 18, 'mono', 'true', 'false')
dev_set_draw ('margin')
dev_set_line_width (3)
* Each of the images is read and smoothed. Subsequently
* dyn_threshold is performed and connected regions are
* looked for. The parameter 'area' of the operator select_shape
* makes it possible to find regions that differ in the area
* size. Found errors are finally counted and displayed.
for J := 1 to 14 by 1
*2.图像分割(局部阈值法)
read_image (Image, 'plastic_mesh/plastic_mesh_' + J$'02')
mean_image (Image, ImageMean, 49, 49)
dyn_threshold (Image, ImageMean, RegionDynThresh, 5, 'dark')
*3.特征提取
*形成不同的连通域
connection (RegionDynThresh, ConnectedRegions)
*选择面积特征如果面积特征大于500 则有缺陷
select_shape (ConnectedRegions, ErrorRegions, 'area', 'and', 500, 99999)
count_obj (ErrorRegions, NumErrors)
dev_display (Image)
dev_set_color ('red')
dev_display (ErrorRegions)
* If the number of errors exceeds zero, the message 'Mesh not
* OK' is displayed. Otherwise the web is undamaged
* and 'Mesh OK' is displayed.
if (NumErrors > 0)
disp_message (WindowHandle, 'Mesh not OK', 'window', 24, 12, 'black', 'true')
else
disp_message (WindowHandle, 'Mesh OK', 'window', 24, 12, 'black', 'true')
endif
* If the sequence number of the image to be inspected is
* lower than 14, the request to press 'Run' to continue appears.
* If the last image is read, pressing 'Run' will clear the SVM.
if (J < 14)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
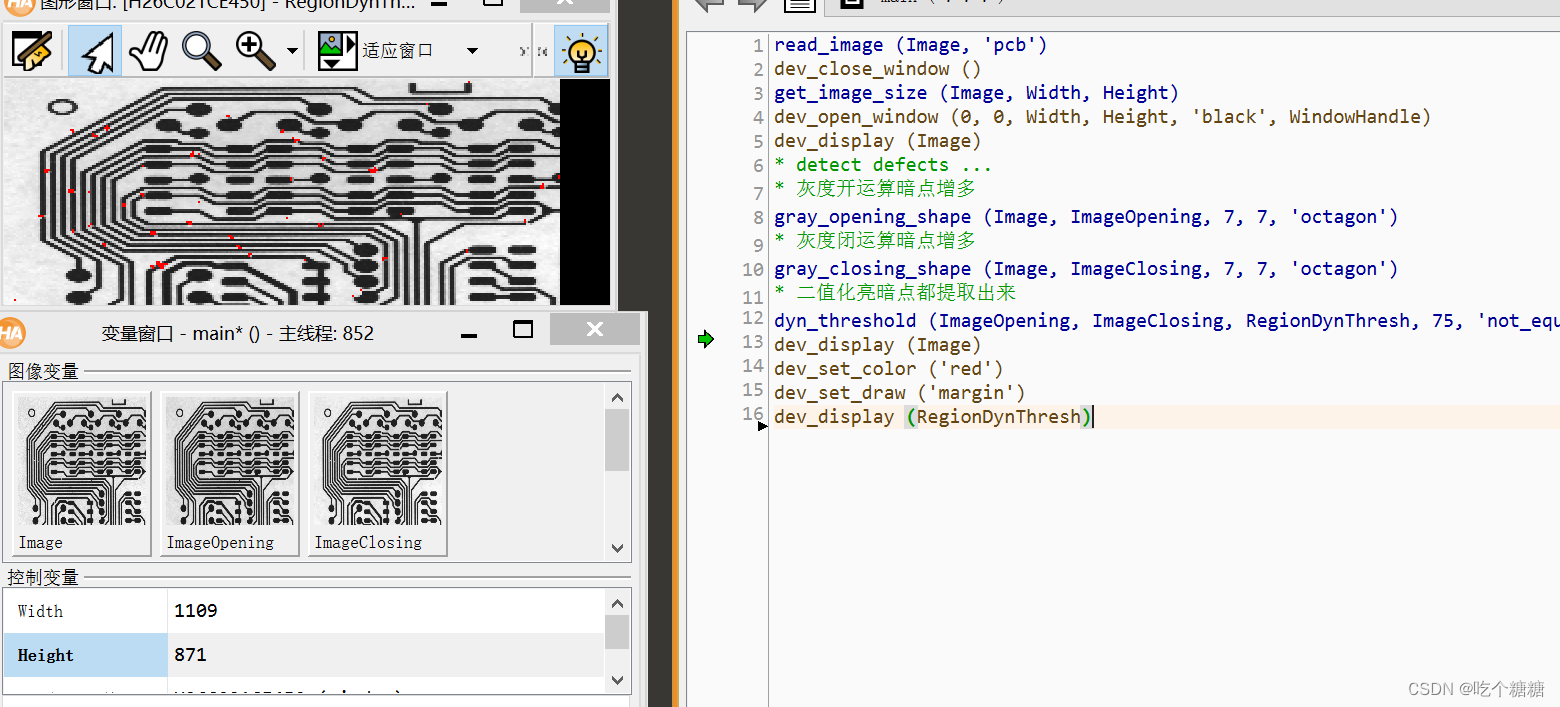
Halcon blob+灰度差分+特征缺陷检测案例
read_image (Image, 'pcb')
dev_close_window ()
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_display (Image)
* detect defects ...
* 灰度开运算暗点增多
gray_opening_shape (Image, ImageOpening, 7, 7, 'octagon')
* 灰度闭运算暗点增多
gray_closing_shape (Image, ImageClosing, 7, 7, 'octagon')
* 二值化亮暗点都提取出来,两个图像相减
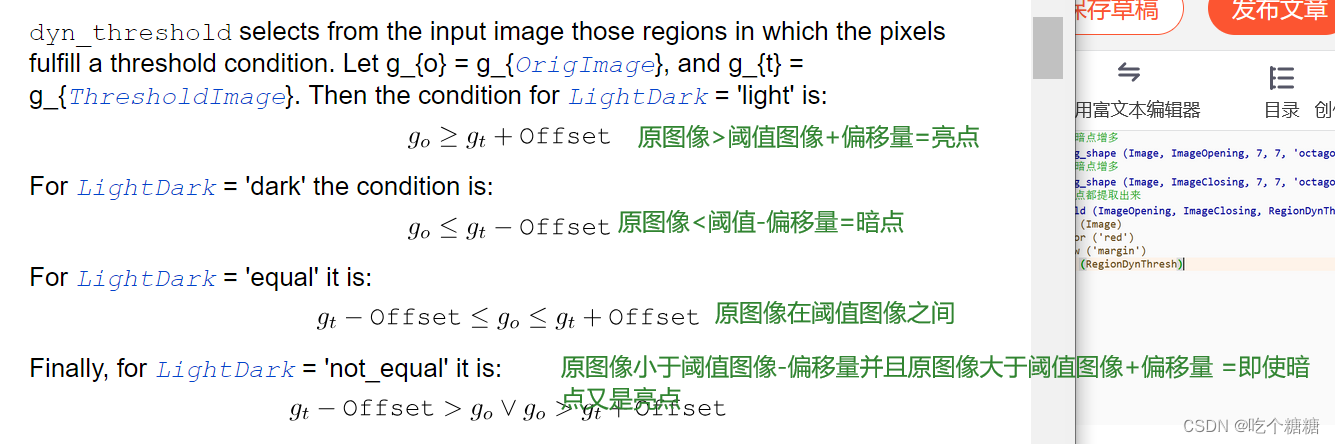
dyn_threshold (ImageOpening, ImageClosing, RegionDynThresh, 75, 'not_equal')
dev_display (Image)
dev_set_color ('red')
dev_set_draw ('margin')
dev_display (RegionDynThresh)
Halcon 定位(blob求角度)+特征
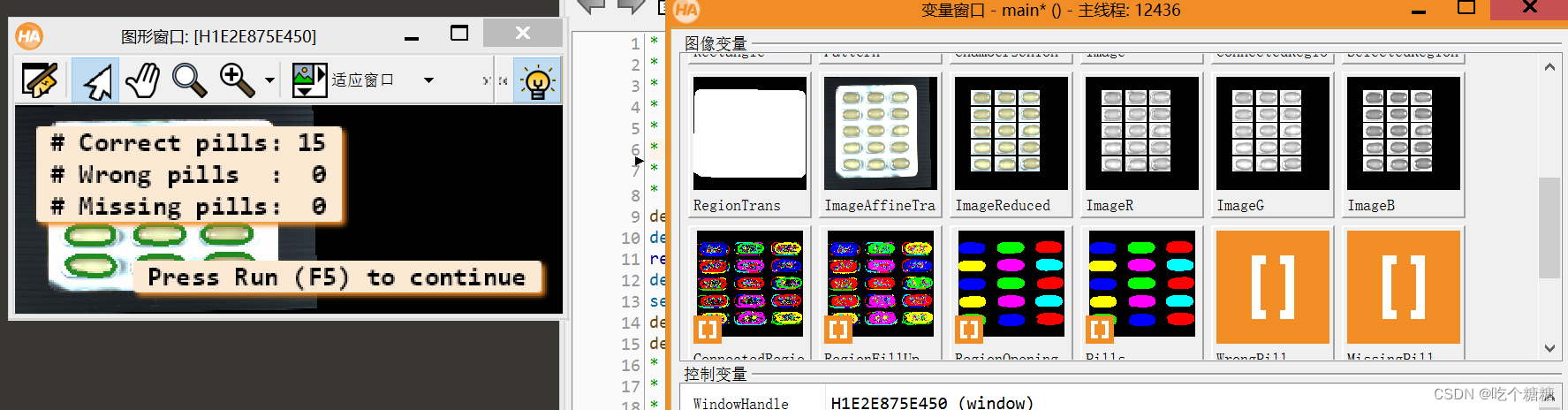
思路:先读取图片,读取一个没有缺陷的图片,进行图片的仿射运算,获取每一个药片的位置,在读取一个可能有缺陷的图片,进行仿射运算,获取每一个药片的位置,之后进行相交,面积小于0(有缺陷),面积大于0判断灰度值的区间,在区间内有缺陷,在区间外没有缺陷
* This example demonstrates an application from the pharmaceutical
* industry. The task is to check the content of automatically filled
* blisters. The first image (reference) is used to locate the chambers
* within a blister shape as a reference model, which is then used to
* realign the subsequent images along to this reference shape. Using
* blob analysis the content of each chamber is segmented and finally
* classified by a few shape features.
* 1.采集图像
dev_close_window ()
dev_update_off ()
read_image (ImageOrig, 'blister/blister_reference')
dev_open_window_fit_image (ImageOrig, 0, 0, -1, -1, WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_set_draw ('margin')
dev_set_line_width (3)
*
* In the first step, we create a pattern to cut out the chambers in the
* subsequent blister images easily.
* 2.定位求标准位置(blob分析)
*获取一个bgr通道
access_channel (ImageOrig, Image1, 1)
*二值化
threshold (Image1, Region, 90, 255)
*凸性转换
shape_trans (Region, Blister, 'convex')
*求区域角度
orientation_region (Blister, Phi)
*求区域的中心点行列坐标面积
area_center (Blister, Area1, Row, Column)
*形成仿射变换矩阵
vector_angle_to_rigid (Row, Column, Phi, Row, Column, 0, HomMat2D)
*对图像求仿射变换
affine_trans_image (ImageOrig, Image2, HomMat2D, 'constant', 'false')
*产生一个空的物体
gen_empty_obj (Chambers)
for I := 0 to 4 by 1
*行
Row := 88 + I * 70
for J := 0 to 2 by 1
*列
Column := 163 + J * 150
*形成一个空的矩形区域
gen_rectangle2 (Rectangle, Row, Column, 0, 64, 30)
*存储图像
concat_obj (Chambers, Rectangle, Chambers)
endfor
endfor
*对区域求仿射变换
affine_trans_region (Blister, Blister, HomMat2D, 'nearest_neighbor')
*区域求差(药板和药片求差) 药板-药片=药板的骨架部分
difference (Blister, Chambers, Pattern)
*将药片合并
union1 (Chambers, ChambersUnion)
*获取药板区域的角度
orientation_region (Blister, PhiRef)
PhiRef := rad(180) + PhiRef
*获取药板区域的面积,行列坐标
area_center (Blister, Area2, RowRef, ColumnRef)
*
*
* Each image read will be aligned to this pattern and reduced to the area of interest,
* which is the chambers of the blister
* 3.缺陷检测,在标准的位置抠药片和原来的区域数组求交集来判断
Count := 6
for Index := 1 to Count by 1
read_image (Image, 'blister/blister_' + Index$'02')
threshold (Image, Region, 90, 255)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 5000, 9999999)
shape_trans (SelectedRegions, RegionTrans, 'convex')
*
* Align pattern along blister of image
* 仿射变换将位置摆正
orientation_region (RegionTrans, Phi)
area_center (RegionTrans, Area3, Row, Column)
vector_angle_to_rigid (Row, Column, Phi, RowRef, ColumnRef, PhiRef, HomMat2D)
affine_trans_image (Image, ImageAffineTrans, HomMat2D, 'constant', 'false')
*
* Segment pills
* 将仿射变换的区域和药片数组的区域裁剪出来
reduce_domain (ImageAffineTrans, ChambersUnion, ImageReduced)
* 获取三色通道
decompose3 (ImageReduced, ImageR, ImageG, ImageB)
* 均值和方差二值化
var_threshold (ImageB, Region, 7, 7, 0.2, 2, 'dark')
* 连接单个区域
connection (Region, ConnectedRegions0)
*闭运算
closing_rectangle1 (ConnectedRegions0, ConnectedRegions, 3, 3)
*填充
fill_up (ConnectedRegions, RegionFillUp)
*特征提取选择区域面积
select_shape (RegionFillUp, SelectedRegions, 'area', 'and', 1000, 99999)
*开运算
opening_circle (SelectedRegions, RegionOpening, 4.5)
* 将开运算的区域精选连接
connection (RegionOpening, ConnectedRegions)
*特征提取筛选出面积
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 1000, 99999)
*将筛选出的特征的图像进行凸性处理
shape_trans (SelectedRegions, Pills, 'convex')
*
* Classify segmentation results and display statistics
*获取药板中的药片数量
count_obj (Chambers, Number)
*产生一个药片缺陷的容器
gen_empty_obj (WrongPill)
*产生一个没有药片的容器
gen_empty_obj (MissingPill)
for I := 1 to Number by 1
*选择标准药片
select_obj (Chambers, Chamber, I)
*标准药片和读取的药片求交集
intersection (Chamber, Pills, Pill)
*获取相交药片的行列坐标,面积
area_center (Pill, Area, Row1, Column1)
*如果面积大于0
if (Area > 0)
*求最大最小灰度值
min_max_gray (Pill, ImageB, 0, Min, Max, Range)
*如果灰度值小于3800大于60
if (Area < 3800 or Min < 60)
*错误的药片
concat_obj (WrongPill, Pill, WrongPill)
endif
else
*如果面积小于0 没有药片
concat_obj (MissingPill, Chamber, MissingPill)
endif
endfor
* 显示
dev_clear_window ()
dev_display (ImageAffineTrans)
dev_set_color ('forest green')
count_obj (Pills, NumberP)
count_obj (WrongPill, NumberWP)
count_obj (MissingPill, NumberMP)
dev_display (Pills)
if (NumberMP > 0 or NumberWP > 0)
disp_message (WindowHandle, 'Not OK', 'window', 12, 12 + 600, 'red', 'true')
else
disp_message (WindowHandle, 'OK', 'window', 12, 12 + 600, 'forest green', 'true')
endif
*
Message := '# Correct pills: ' + (NumberP - NumberWP)
Message[1] := '# Wrong pills : ' + NumberWP
Message[2] := '# Missing pills: ' + NumberMP
*
Colors := gen_tuple_const(3,'black')
if (NumberWP > 0)
Colors[1] := 'red'
endif
if (NumberMP > 0)
Colors[2] := 'red'
endif
disp_message (WindowHandle, Message, 'window', 12, 12, Colors, 'true')
dev_set_color ('red')
dev_display (WrongPill)
dev_display (MissingPill)
if (Index < Count)
disp_continue_message (WindowHandle, 'black', 'true')
endif
stop ()
endfor
Halcon 定位(模板匹配)+测量
* In this example a fill level check for the
* pharmaceutical industry is demonstrated. The task is
* to check for the fill level of each single nose drop ampoule.
* To do so, we first locate each ampoule head by applying
* shape-based matching, then we find the fill level
* by measuring the gray level change using a 1D Measuring.
*
* 1.采集图像
dev_close_window ()
dev_update_off ()
read_image (Image, 'ampoules/ampoules_01')
get_image_size (Image, Width, Height)
dev_open_window_fit_image (Image, 0, 0, -1, -1, WindowHandle)
dev_set_line_width (2)
dev_set_draw ('margin')
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
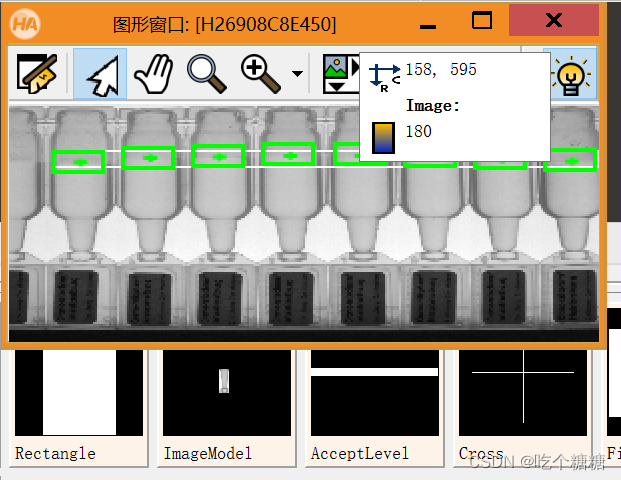
* 2.定位找到参考线
* Create a model for the ampoule head to align the measure handle
*产生一个矩形
gen_rectangle1 (Rectangle, 230, 280, 317, 330)
* 矩形裁剪
reduce_domain (Image, Rectangle, ImageModel)
* 创建模板
create_shape_model (ImageModel, 'auto', 0, 0, 'auto', 'auto', 'use_polarity', 'auto', 'auto', ModelID)
*
* Initialize the measure handle
* 初始化测量矩形
gen_measure_rectangle2 (0, 0, rad(90), 75, 20, Width, Height, 'bilinear', MeasureHandle)
Tolerance := 15
*
* Determine the fill level
NumImages := 8
for Index := 1 to NumImages by 1
* 读取图片
read_image (Image, 'ampoules/ampoules_' + Index$'.2d')
ColumnEdges := []
FillLevelHeight := []
* 查找模板
find_shape_model (Image, ModelID, 0, 0, 0.7, 0, 0.1, 'least_squares', 0, 0.9, Row, Column, Angle, Score)
* 平均行
MeanRow := mean(Row)
* 参考线 =平均水平坐标-160
RefLevel := MeanRow - 160
* Display tolerance area
dev_display (Image)
dev_set_line_width (1)
dev_set_color ('white')
* 产生一个参考矩形,参考矩形的中间的线为参考线
gen_rectangle2 (AcceptLevel, RefLevel, mean(Column), 0, 30 + (max(Column) - min(Column)) / 2, Tolerance)
* 绘制矩形
dev_display (AcceptLevel)
dev_set_line_width (2)
* 3.形成测量矩形找液面边缘
* Determine fill level of each ampoule
Errors := 0
for Idx := 0 to |Score| - 1 by 1
* 移动到测量点,行=参考的基准-135,列模板匹配到的列
translate_measure (MeasureHandle, MeanRow - 135, Column[Idx])
* Search for the topmost edge
* 测量边
measure_pos (Image, MeasureHandle, 2, 7, 'all', 'first', RowEdge, ColumnEdge, Amplitude, Distance)
FillLevelHeight := [FillLevelHeight,RowEdge]
ColumnEdges := [ColumnEdges,ColumnEdge]
* 生成亚像素轮廓
gen_cross_contour_xld (Cross, RowEdge, ColumnEdge, 15, 0)
* 绘制矩形
gen_rectangle2 (FillLevel, RowEdge, ColumnEdge, 0, 28, 20)
* 4.计算参考线和边缘之间的距离
* 判断是否合格,水平高度 - 矩形的高度 >= 15 不合格
if (abs(FillLevelHeight[Idx] - RefLevel) >= Tolerance)
* 产生一个矩形
gen_rectangle2 (ChamberSingle, MeanRow - 133, Column[Idx], 0, 35, 90)
* 产生十字
gen_cross_contour_xld (Cross, FillLevelHeight[Idx], ColumnEdges[Idx], 15, 0)
gen_rectangle2 (FillLevel, FillLevelHeight[Idx], ColumnEdges[Idx], 0, 28, 20)
Errors := Errors + 1
dev_set_color ('red')
dev_display (ChamberSingle)
disp_message (WindowHandle, 'NG', 'image', FillLevelHeight[Idx] - 50, ColumnEdges[Idx] - 10, 'red', 'false')
else
disp_message (WindowHandle, 'OK', 'image', FillLevelHeight[Idx] - 50, ColumnEdges[Idx] - 10, 'green', 'false')
dev_set_color ('green')
endif
dev_display (FillLevel)
dev_display (Cross)
endfor
*
* Check, whether the fill level is within the allowed range - does not deviate too much
* from average fill level
*
* Display statistics
*显示
if (Errors > 0)
disp_message (WindowHandle, Errors + ' BAD', 'window', 10, 12, 'red', 'true')
else
disp_message (WindowHandle, 'All OK', 'window', 10, 12, 'forest green', 'true')
endif
if (Index < NumImages)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
Halcon 拟合方法的求缺陷
* This example program shows how fit_rectangle2_contour_xld can be used to
* detect manufacturing errors of punched holes in a metal part. The errors
* show up as small protrusions of the metal into the hole. They can be detected
* by fitting rectangles to the edges of the hole robustly (i.e., with outlier
* suppression) and the calculating the distances of the edges to the rectangle
* sides using dist_rectangle2_contour_points_xld. Since the corners of the
* holes are slightly rounded, some extra processing must be performed to
* disregard the corners in the check for errors.
* 1.图像的采集
dev_update_off ()
read_image (Image, 'punched_holes')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
dev_display (Image)
* Since the metal part is backlit, the processing speed can be increased
* significantly by constructing a ROI for the subpixel-precise edge extraction
* that is as small as possible. This can easily be achieved by thresholding and
* morphology.
* 2.预处理(逼近边缘图像,进行抠图1.手画 2.blob分析)
fast_threshold (Image, Region, 128, 255, 10)
* 求区域内边界
boundary (Region, Border, 'inner')
* 矩形膨胀
dilation_rectangle1 (Border, EdgeROI, 7, 7)
* 抠图
reduce_domain (Image, EdgeROI, ImageReduced)
* Perform the edge extraction.
* 边缘亚像素处理
edges_sub_pix (ImageReduced, Edges, 'canny', 1.7, 40, 120)
* Remove edge fragments that are too short.
* 选择需要的区域周长 500以上
select_shape_xld (Edges, RectangleEdges, 'contlength', 'and', 500, 100000)
* Fit rectangles to the holes' edges using the outlier suppression of Tukey.
* 拟合最小外接矩形
fit_rectangle2_contour_xld (RectangleEdges, 'tukey', -1, 0, 0, 3, 2, Row, Column, Phi, Length1, Length2, PointOrder)
* Create rectangles with the fitted parameters for visualization purposes.
* 形成一个拟合的矩形区域
gen_rectangle2_contour_xld (Rectangles, Row, Column, Phi, Length1, Length2)
dev_set_color ('yellow')
dev_display (Rectangles)
* Check whether the holes are OK.
* 求轮廓上的点和最小外接矩形上的点之间的距离
count_obj (RectangleEdges, Number)
for I := 0 to Number - 1 by 1
*选择获取轮廓
select_obj (RectangleEdges, RectangleEdge, I + 1)
* Get the contour's coordinates.
* 获取亚像素轮廓上的点的坐标
get_contour_xld (RectangleEdge, Rows, Cols)
* Create a rectangle with the appropriate rectangle parameters.
*产生一个亚像素轮廓矩形
gen_rectangle2_contour_xld (Rect, Row[I], Column[I], Phi[I], Length1[I], Length2[I])
* Get the coordinates of the rectangle's corners.
*获取产生亚像素轮廓点的坐标 (获取坐标点的四个顶点,最后一个点回到原点,一共5个点)
get_contour_xld (Rect, RowC, ColC)
* Calculate the distances of all the contour points to the four corners of the
* rectangle.
* 勾股定理求两点之间的距离
D1 := sqrt((Rows - RowC[0]) * (Rows - RowC[0]) + (Cols - ColC[0]) * (Cols - ColC[0]))
D2 := sqrt((Rows - RowC[1]) * (Rows - RowC[1]) + (Cols - ColC[1]) * (Cols - ColC[1]))
D3 := sqrt((Rows - RowC[2]) * (Rows - RowC[2]) + (Cols - ColC[2]) * (Cols - ColC[2]))
D4 := sqrt((Rows - RowC[3]) * (Rows - RowC[3]) + (Cols - ColC[3]) * (Cols - ColC[3]))
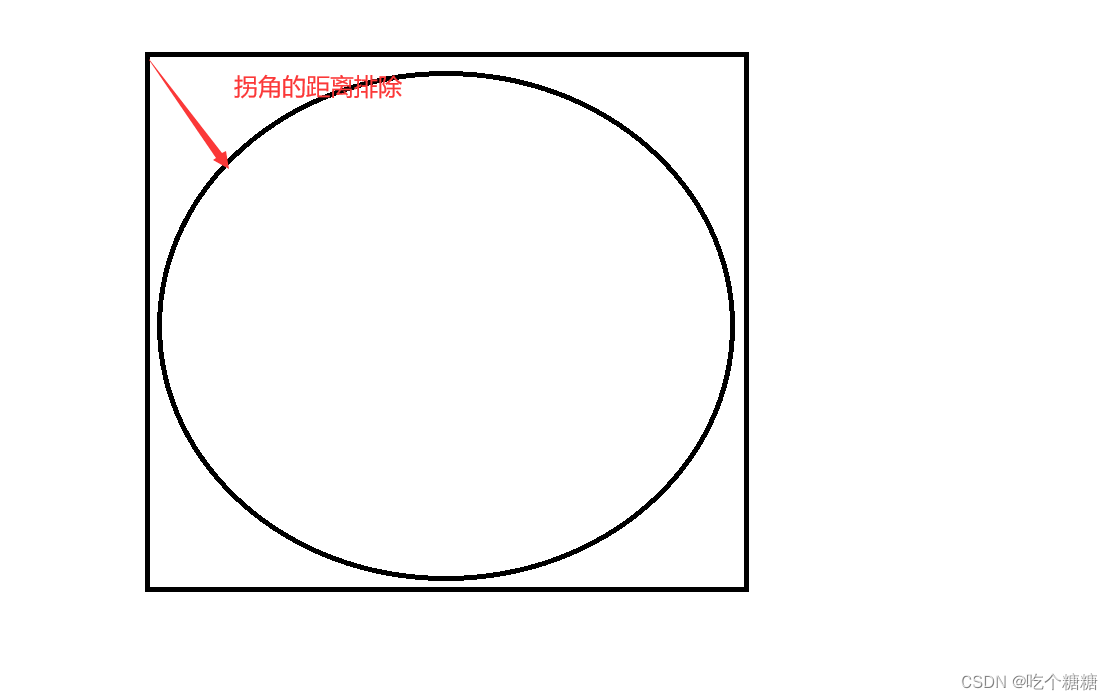
* The distance of the contour points to the corners of the rectangle is given
* by the minimum of the four distances. This distance is used to exclude
* contour points that are too close to the corners from the check for errors.
*点到轮廓的最小距离(点到四个顶点的距离)
DistCorner := min2(min2(D1,D2),min2(D3,D4))
* Calculate the distances of the contour points of the rectangle.
* 求轮廓上的点到最小外接矩形边的距离
dist_rectangle2_contour_points_xld (RectangleEdge, 0, Row[I], Column[I], Phi[I], Length1[I], Length2[I], Dist)
* Check whether the hole is OK by examining the distances of the contour
* points to the rectangle. A hole is OK if all points that lie more than seven
* pixels from the corners have a distance of less than one pixel to the fitted
* rectangle. To do so, we could use the following code:
* RectangleOK := true
* for J := 0 to |Dist| - 1 by 1
* if (DistCorner[J] > 7.0 and Dist[J] > 1.0)
* RectangleOK := false
* break
* endif
* endfor
* A much faster way to do this in HDevelop is to generate a mask that
* contains 0 for all points that should not be taken into account and 1
* otherwise. To do so, we subtract the minimum distance of 7.0 from the
* distances to the corners and take the maximum of 0.0 and the resulting
* values. This sets all the distances that are too close to the corners to 0.
* To set all other values to 1, we can simply take the sign of the values.
*去除矩形的四个角上的点
*sgn为符号函数将DistCorner - 7.0>0的值设置为1 ,如果没有>0的就为0, -7.0 为了排除拐角的距离
Mask := sgn(max2(DistCorner - 7.0,0.0))
* We can now multiply the distances to the rectangle with the mask and
* check whether the maximum distance is smaller than the maximum allowed
* distance of 1.0.
* 如果max(Dist * Mask)<= 1.0则为正常,否则有缺陷
RectangleOK := max(Dist * Mask) <= 1.0
* Display whether the hole is OK.
if (RectangleOK)
dev_set_color ('green')
get_string_extents (WindowHandle, 'OK', Ascent, Descent, Width, Height)
set_tposition (WindowHandle, Row[I] - Height / 2, Column[I] - Width / 2)
write_string (WindowHandle, 'OK')
else
dev_set_color ('red')
get_string_extents (WindowHandle, 'Not OK', Ascent, Descent, Width, Height)
set_tposition (WindowHandle, Row[I] - Height / 2, Column[I] - Width / 2)
write_string (WindowHandle, 'Not OK')
endif
endfor
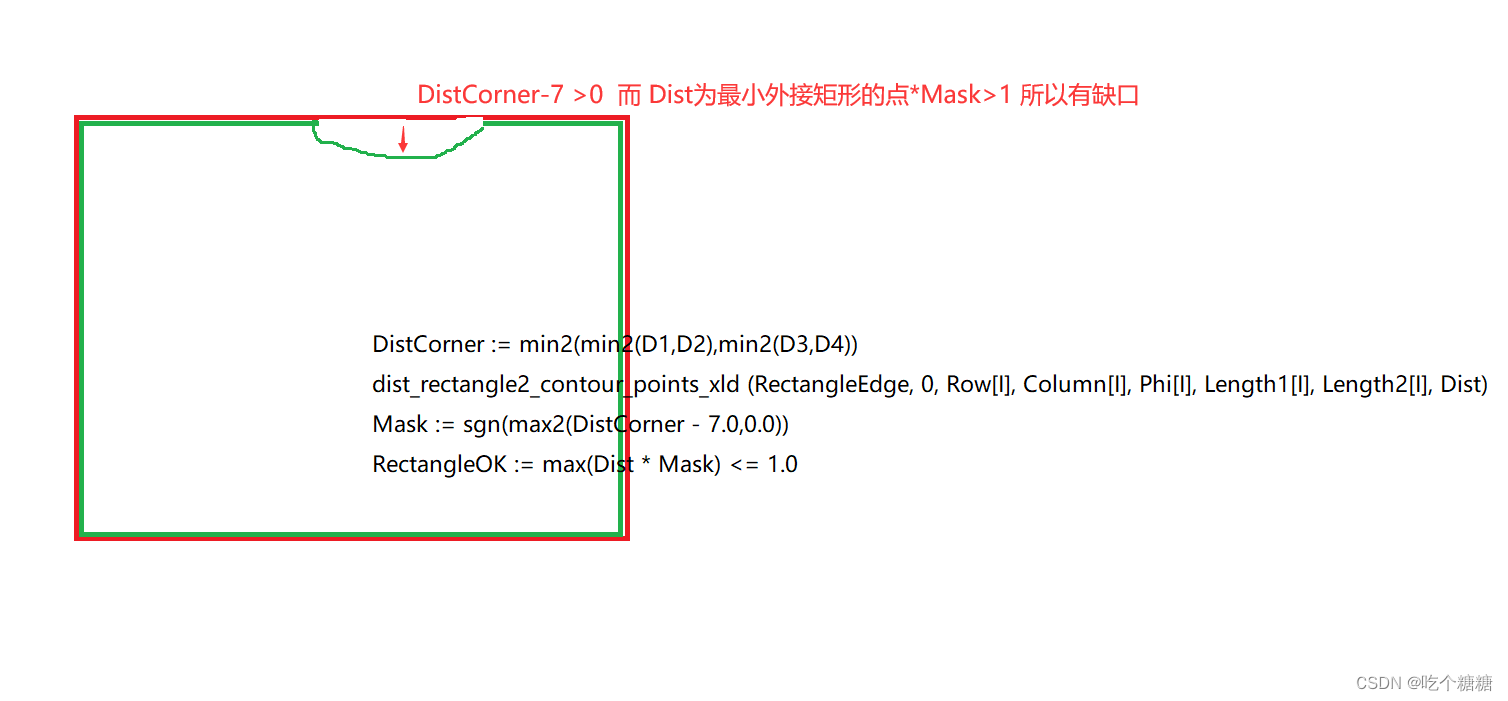
Mask := sgn(max2(DistCorner - 7.0,0.0))排除拐角的距离
Halcon OCV光学字符检测
OCV 模板创建
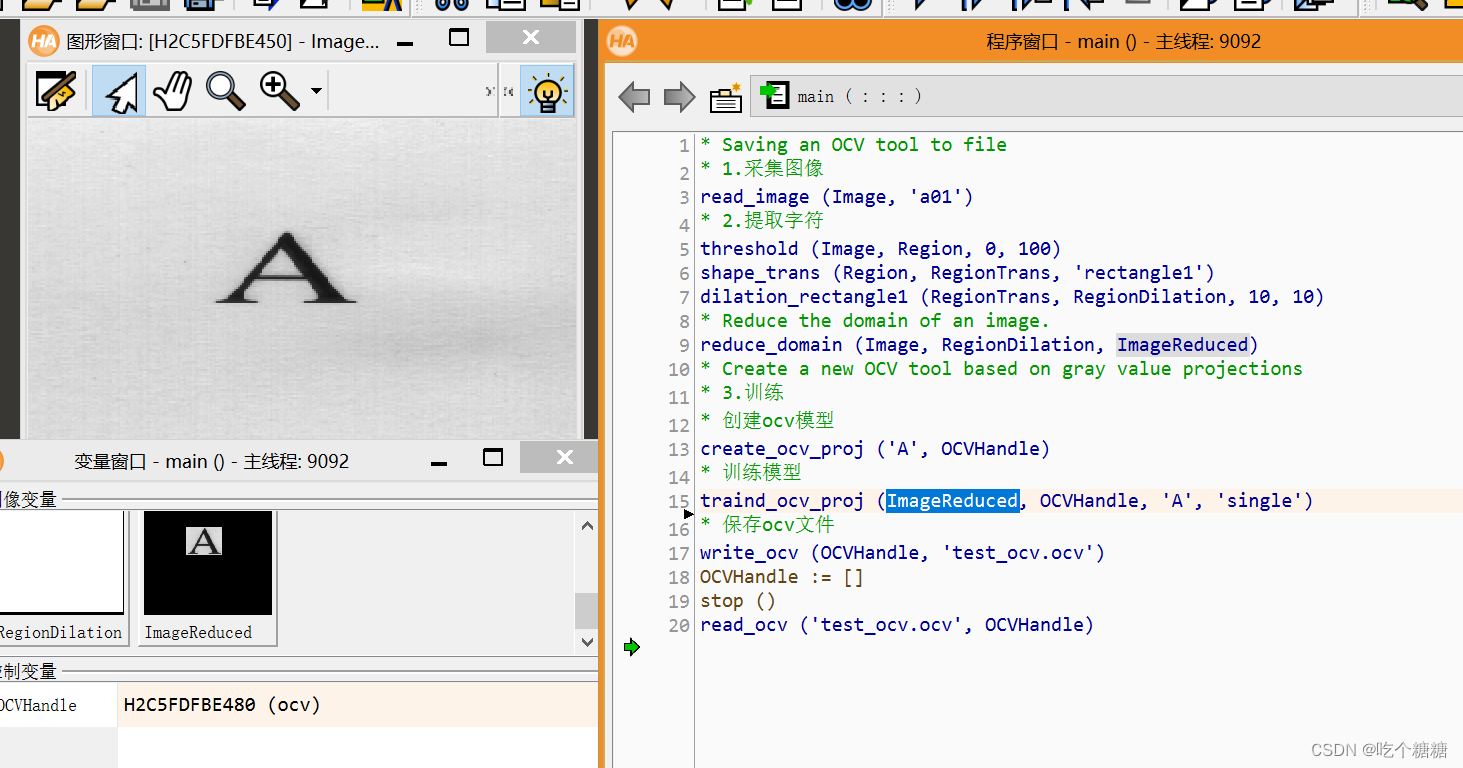
* Saving an OCV tool to file
* 1.采集图像
read_image (Image, 'a01')
* 2.提取字符
threshold (Image, Region, 0, 100)
shape_trans (Region, RegionTrans, 'rectangle1')
dilation_rectangle1 (RegionTrans, RegionDilation, 10, 10)
* Reduce the domain of an image.
reduce_domain (Image, RegionDilation, ImageReduced)
* Create a new OCV tool based on gray value projections
* 3.训练
* 创建ocv模型
create_ocv_proj ('A', OCVHandle)
* 训练模型
traind_ocv_proj (ImageReduced, OCVHandle, 'A', 'single')
* 保存ocv文件
write_ocv (OCVHandle, 'test_ocv.ocv')
OCVHandle := []
stop ()
read_ocv ('test_ocv.ocv', OCVHandle)
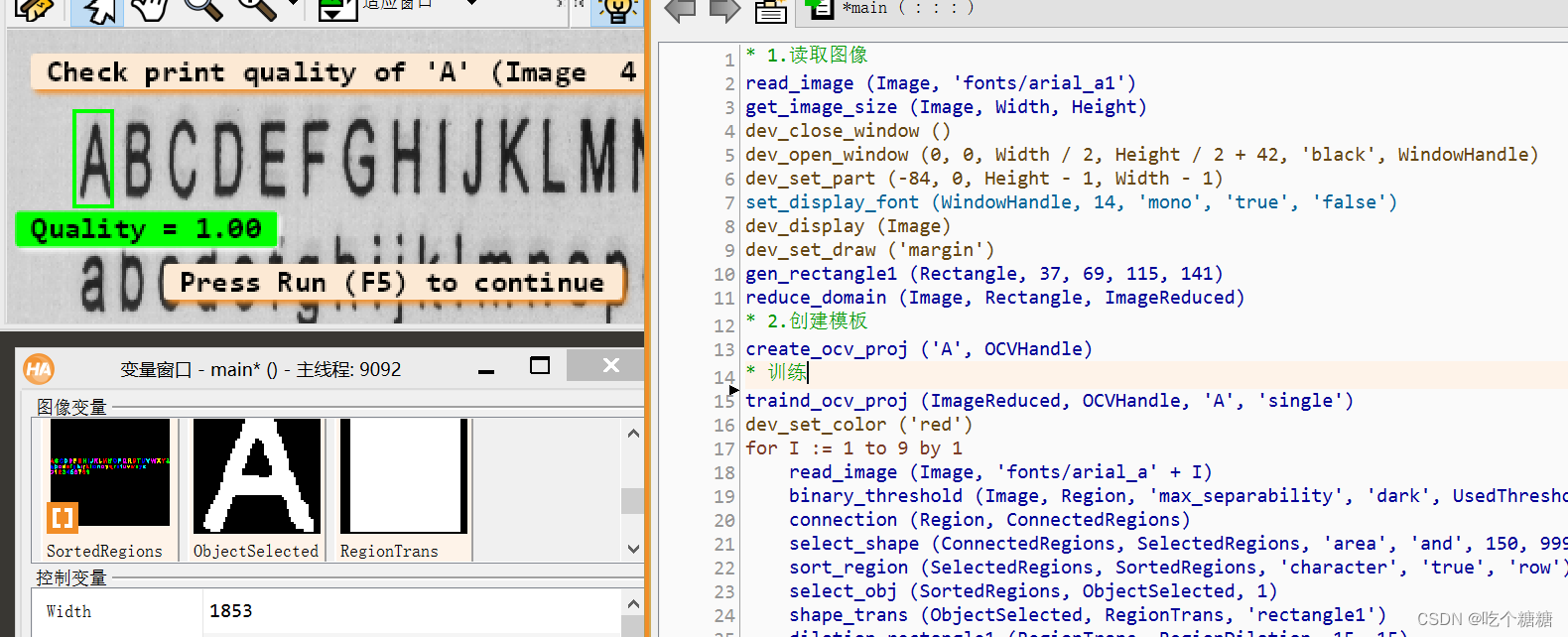
OCV 字符质量缺陷识别
* 1.读取图像
read_image (Image, 'fonts/arial_a1')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width / 2, Height / 2 + 42, 'black', WindowHandle)
dev_set_part (-84, 0, Height - 1, Width - 1)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_display (Image)
dev_set_draw ('margin')
gen_rectangle1 (Rectangle, 37, 69, 115, 141)
reduce_domain (Image, Rectangle, ImageReduced)
* 2.创建模板
create_ocv_proj ('A', OCVHandle)
* 训练
traind_ocv_proj (ImageReduced, OCVHandle, 'A', 'single')
dev_set_color ('red')
for I := 1 to 9 by 1
read_image (Image, 'fonts/arial_a' + I)
binary_threshold (Image, Region, 'max_separability', 'dark', UsedThreshold)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 150, 99999)
sort_region (SelectedRegions, SortedRegions, 'character', 'true', 'row')
select_obj (SortedRegions, ObjectSelected, 1)
shape_trans (ObjectSelected, RegionTrans, 'rectangle1')
dilation_rectangle1 (RegionTrans, RegionDilation, 15, 15)
reduce_domain (Image, RegionDilation, ImageReduced)
* Quality 获取字符质量
do_ocv_simple (ImageReduced, OCVHandle, 'A', 'true', 'true', 'true', 'true', 5, Quality)
* Display quality 质量大于0.9合格
if (Quality > 0.9)
Color := 'green'
elseif (Quality > 0.7)
Color := 'yellow'
else
Color := 'red'
endif
dev_display (Image)
dev_set_color (Color)
dev_set_line_width (2)
dev_display (RegionDilation)
disp_message (WindowHandle, 'Check print quality of \'A\' (Image ' + I + ' of 9)', 'window', 12, 12, 'black', 'true')
disp_message (WindowHandle, 'Quality = ' + Quality$'.2f', 'image', 120, 12, 'black', Color)
if (I < 9)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
OCV 字符缺陷检测展示案例
read_image (Image, 'a01')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_display (Image)
threshold (Image, Region, 0, 100)
shape_trans (Region, RegionTrans, 'rectangle1')
dilation_rectangle1 (RegionTrans, RegionDilation, 10, 10)
reduce_domain (Image, RegionDilation, ImageReduced)
create_ocv_proj ('A', OCVHandle)
traind_ocv_proj (ImageReduced, OCVHandle, 'A', 'single')
dev_set_color ('red')
for add := -20 to 20 by 1
scale_image (Image, ImageScaled, 1, add)
reduce_domain (ImageScaled, RegionDilation, ImageReduced)
do_ocv_simple (ImageReduced, OCVHandle, 'A', 'true', 'true', 'true', 'true', -1, Quality)
set_tposition (WindowHandle, 24, 12)
write_string (WindowHandle, 'Intensity change = ' + add + ' Quality = ' + Quality)
stop ()
endfor
for scale := 0.8 to 1.2 by 0.025
scale_image (Image, ImageScaled, scale, 0)
reduce_domain (ImageScaled, RegionDilation, ImageReduced)
do_ocv_simple (ImageReduced, OCVHandle, 'A', 'true', 'true', 'true', 'true', -1, Quality)
set_tposition (WindowHandle, 24, 12)
write_string (WindowHandle, 'Intensity scale = ' + scale + ' Quality = ' + Quality)
stop ()
endfor
for Length := 1 to 17 by 1
gen_rectangle1 (Rectangle, 150, 145, 150 + 5, 145 + Length)
paint_region (Rectangle, Image, ImageError, 210, 'fill')
reduce_domain (ImageError, RegionDilation, ImageReduced)
do_ocv_simple (ImageReduced, OCVHandle, 'A', 'true', 'true', 'true', 'true', -1, Quality)
set_tposition (WindowHandle, 24, 12)
write_string (WindowHandle, 'Length of rectangle = ' + Length + ' Quality = ' + Quality)
stop ()
endfor