前言
我打算使用realsence的左右连个摄像头去自己标定配准、然后计算距离的,就需要找s、下载包。
没成想,这个455的左右摄像头是红外的
步骤
- 安装sdk:
Intel RealSense SDK 2.0 – Intel RealSense Depth and Tracking cameras
尽量在win上安装,ubuntu步骤真的要吐
- 安装python包或者其他包
pip install pyrealsense2
- 启动代码
代码
RGB
如果设备是旧版本,支持左右rgb的话
import pyrealsense2 as rs
import cv2
import numpy as np
# 创建一个 Realsense 管道
pipeline = rs.pipeline()
# 配置管道以启用左右两个摄像头
config = rs.config()
#config.enable_device_from_file("path/to/bag/file.bag") # 如果从录制文件中读取,请提供文件路径
config.enable_stream(rs.stream.left)
config.enable_stream(rs.stream.right)
# 启动管道
pipeline.start(config)
try:
while True:
# 等待获取一帧数据
frames = pipeline.wait_for_frames()
# 获取左右两个摄像头的帧数据
left_frame = frames.get_color_frame()
right_frame = frames.get_color_frame()
# 在这里可以对左右两个帧数据进行处理
# 显示左右两个摄像头的图像
left_image = np.asanyarray(left_frame.get_data())
right_image = np.asanyarray(right_frame.get_data())
cv2.imshow('Left Camera', left_image)
cv2.imshow('Right Camera', right_image)
# 按下 q 键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
# 关闭管道并且清理资源
pipeline.stop()
cv2.destroyAllWindows()infrared
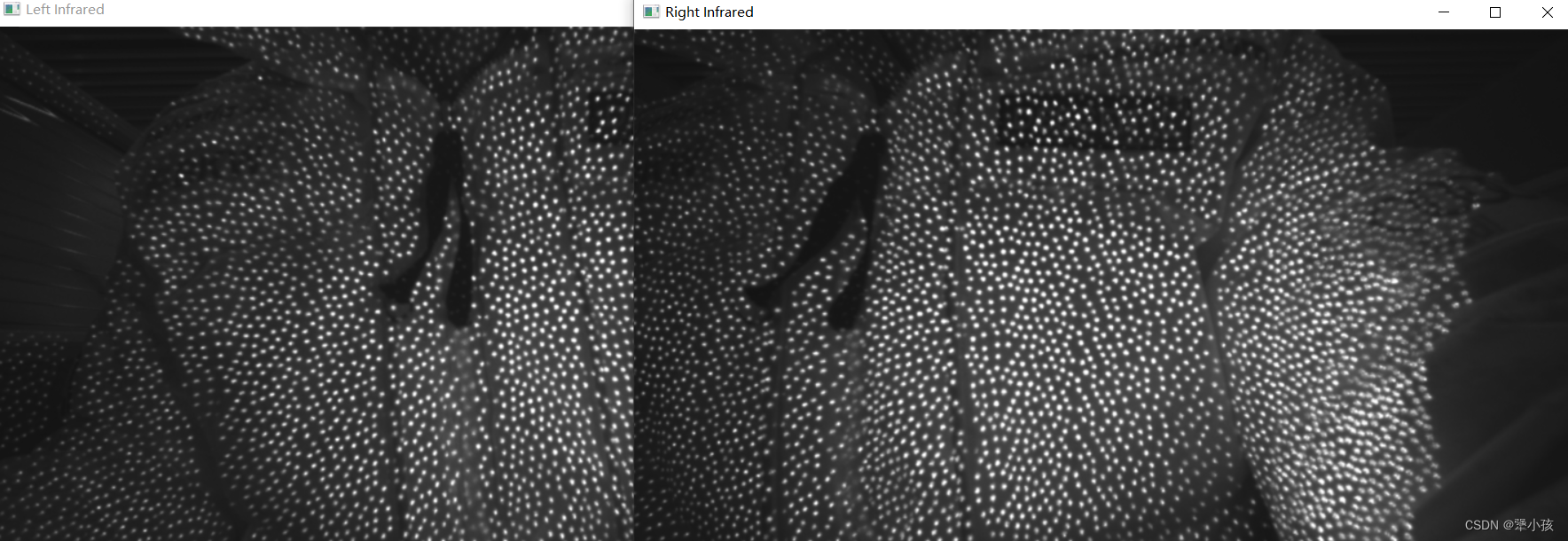
如果不支持rgb,只能红外了
import pyrealsense2 as rs
import numpy as np
import cv2
# 创建一个 Realsense 管道
pipeline = rs.pipeline()
# 配置管道以启用左右两个摄像头(红外流)
config = rs.config()
config.enable_device_from_file("path/to/bag/file.bag") # 如果从录制文件中读取,请提供文件路径
config.enable_stream(rs.stream.infrared, 1) # 左侧红外流
config.enable_stream(rs.stream.infrared, 2) # 右侧红外流
# 启动管道
pipeline.start(config)
try:
while True:
# 等待获取一帧数据
frames = pipeline.wait_for_frames()
# 获取左右两个红外流的帧数据
left_frame = frames.get_infrared_frame(1)
right_frame = frames.get_infrared_frame(2)
# 在这里可以对左右两个帧数据进行处理
# 将红外流的帧数据转换为图像
left_image = np.asanyarray(left_frame.get_data())
right_image = np.asanyarray(right_frame.get_data())
# 显示左右两个红外流的图像
cv2.imshow('Left Infrared', left_image)
cv2.imshow('Right Infrared', right_image)
# 按下 q 键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
# 关闭管道并且清理资源
pipeline.stop()
cv2.destroyAllWindows()