本期文章分享TI毫米波雷达实测4D点云生成的代码,包含距离、速度、水平角度、俯仰角度,可用于日常学习。
处理流程包含:数据读取和解析、MTI、距离估计、速度估计、非相干累积、2D-CFAR、水平角估计、俯仰角估计、点云生成、坐标转换等内容。
雷达天线布局如下所示:

本代码以IWR6843为例,目标是行人,后续,可以修改用于1243、1443、1843等型号的雷达。
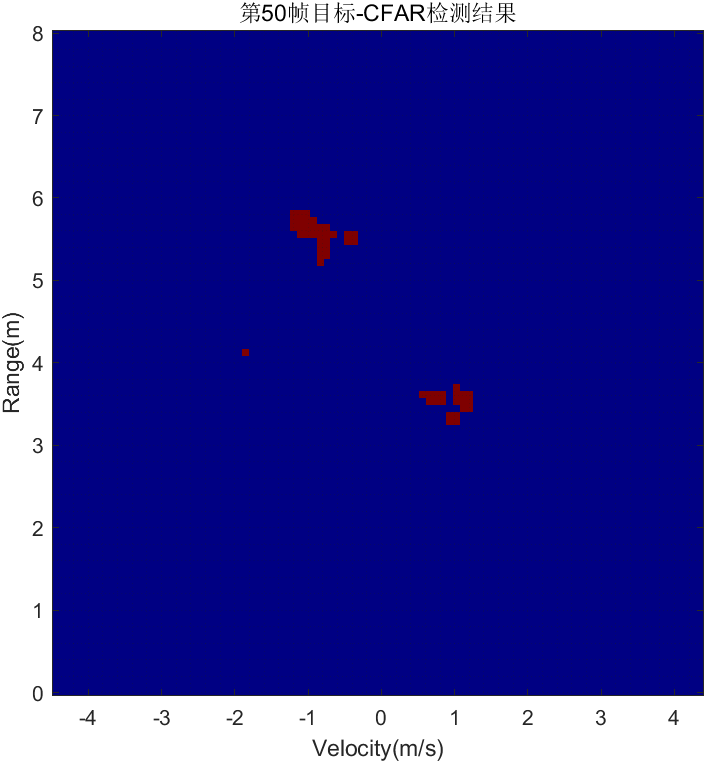
CFAR检测结果如下,这里采集的数据是两个行人目标,CFAR显示的结果比较好:
4D点云显示结果如下:
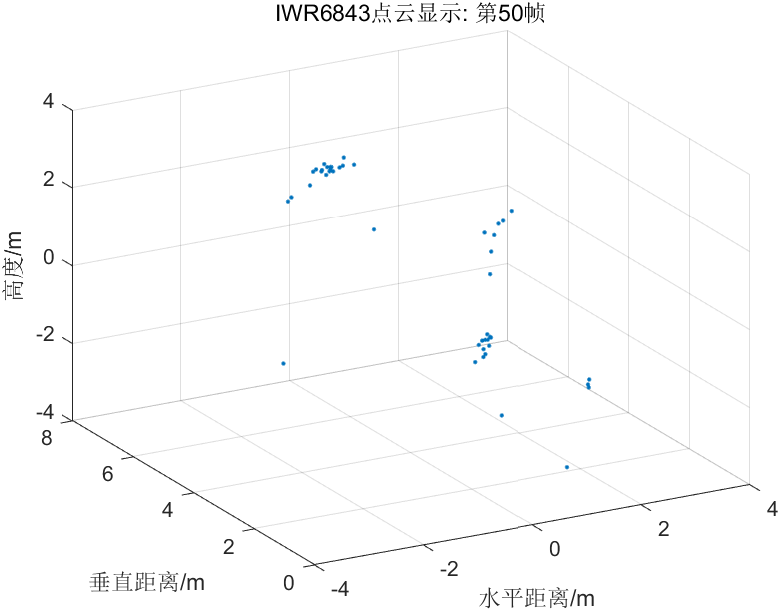
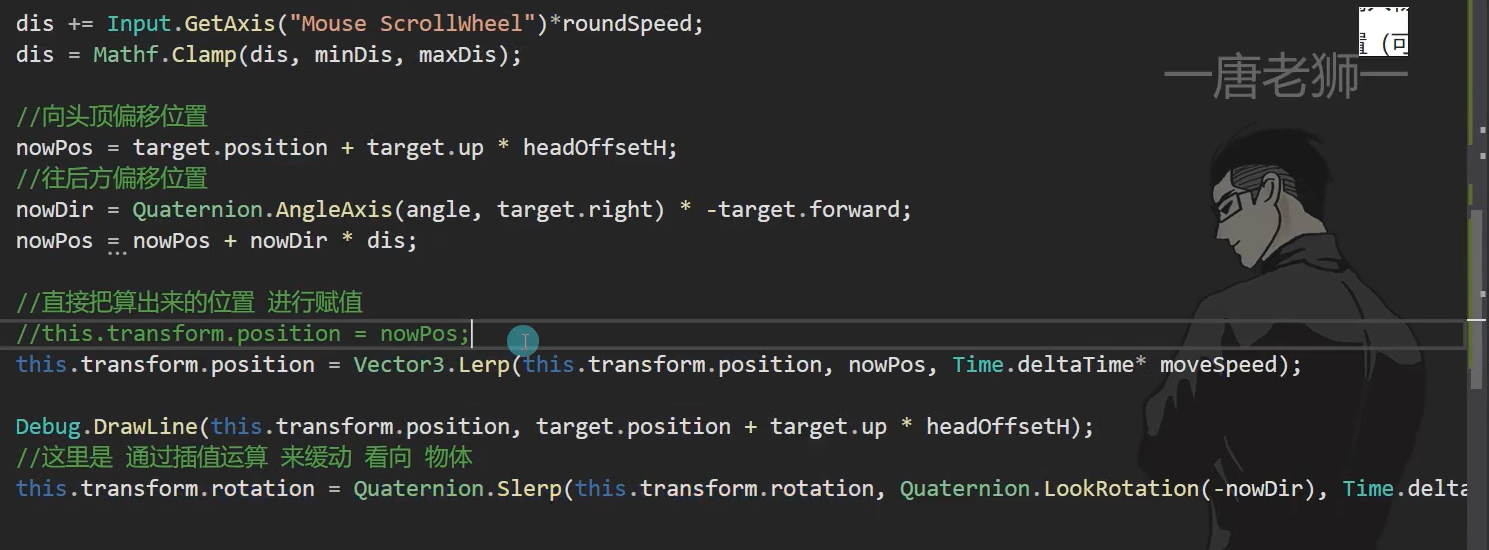
点云显示域坐标转换部分代码:
%% 4D点云生成
disp(strcat(['=====','点云生成','=====']));
pcd_x = targetPerFrame.rangeSet .* cosd(targetPerFrame.elevationSet) .* sind(targetPerFrame.azimuthSet);
pcd_y = targetPerFrame.rangeSet .* cosd(targetPerFrame.elevationSet) .* cosd(targetPerFrame.azimuthSet);
pcd_z = targetPerFrame.rangeSet .* sind(targetPerFrame.elevationSet);
figure(1);
plot3(pcd_x,pcd_y,pcd_z,'.');
xlabel('水平距离/m');ylabel('垂直距离/m');zlabel('高度/m');title(['IWR6843点云显示: 第',num2str(frame_id),'帧']);grid on
xlim([-4,4]);ylim([0,8]);zlim([-4,4])
view([-80,-80,60]);
代码和数据下载链接:https://mbd.pub/o/bread/ZZqUkp1q