作者:毕钟诚 施钥 范江龙 张莉曼 陈金凤
单位:中国石油大学(北京)
指导老师:许亚岚 孙琳
世纪全球自然灾害频发,灾后探测重建工作十分重要,极端恶劣的现场探测环境,频发的余震甚至是有毒环境、辐射环境等会导致一些石油化工厂设备破坏原料泄露,容易引发爆炸火灾,增加了的发生二次事故的可能性,严重危害了受难者的生命安全和搜救人员的人身安全。基于此搜救机器人逐渐被重视起来,成为机器人研究中的一个重要领域。本文参考多个不同种类灾区的探测环境,包括火情过后的工厂、地震过后的房屋废墟、山洪过后的淤泥道路等,设计出五种典型的障碍物地形与三种常见的检测物,并将地形与检测物组合,作为六足灾后巡查机器人演示的实际模拟场景,并对机器人巡检演示路径进行了规划。
灾后探测检测六足机器人主要设计为机械结构和电控系统,为实现机械结构的避障和跨越功能,查阅文献发现可选择轮式机器人和腿式机器人,其中轮足机器人灵活性差惯性大,且其PID 调节难以满足复杂环境。因此选择足腿式机器人,同时考虑四足机器人较难实现,对比四足腿式结构,六足机器人稳定性更强更好控制,因此选择六足步态。
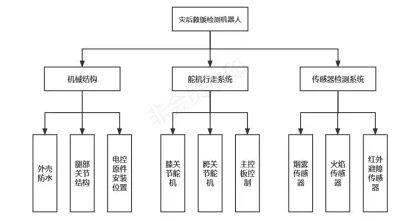
参考仿生学设计为六足机器人,分为”膝关节”和“胯关节”,通过舵机控制完成机器人的“迈腿”和“抬腿”,利用舵机的角度控制机器人抬升和高度,最终腿之间相互配合完成机器人的行走和转弯。控制部分通过主控板控制利用 keil 进行编程,其中主控板利用stm32F01系列,主要控制分为舵机行走系统,传感器检测系统。舵机通过和主控板相连将检测到的信号返回给主控板,主控板接收到信息进行处理从而控制机器人步态,完成机器人行走和避障。传感器通过检测环境中的烟雾和火焰等危险因素,及时报警防止发生二次事故和灾难。
关键词:六组步态;火焰烟雾检测;灾后场景仿真;舵机行走系统
1. 研究目的及背景
1.1 研究背景
21世纪全球环境问题日益严重,自然灾害、工厂事故频发,灾后探测工作一直是减少二次事故的的重要课题。极端恶劣的现场探测环境,频发的余震、危险建筑废墟、有毒环境、辐射环境等,不仅严重影响探测的效率和效果,更极大地威胁探测工作人员的生命安全。同时灾难的发生会导致一些石油化工厂设备破坏原料泄露,容易引发爆炸火灾,增加了的发生二次事故的可能性,严重危害了受难者的生命安全和搜救人员的人身安全,经过1995 年的美国俄克拉荷马州爆炸案、“9.11”事件后,灾后探测机器人才逐渐被重视起来,用于灾害探测的机器人的研究起步于20世纪80年代,成为机器人研究中的一个重要领域。

因此采用探测机器人来代替探测队员在较高危险系数的环境下进行探测,显著地提高了探测队员的安全系数,保障了探测队员的生命安全。要求机器人具有检测灾后环境中的烟雾和火焰的功能,同时检测后及时报警的功能,基于此本文研制六足探测机器人,代替工作人员的进行灾后二次检测,防止发生爆炸等事故造成二次伤害。
1.2 研究现状
沈阳自动化研究所设计研发了一款用于地震搜救的履带式机器人,这款机器人可以通过判断现场环境的复杂情况,选择使用条形或三角形两种行走形态,深入探测人员难以进入的狭小废墟环境中进行地震探测。机器人配备红外传感器和摄像机,可以感知被困人员的温度和呼吸,进而判断被困人员是否存在生命特征,并将信息发送给探测人员。
日本研究专家Satoshi Tadokoro发明了一款名为Snakebot的蛇形机器人,如下图所示,这款机器人长约8 m,主要用于地震探测中的搜索工作。这款机器人由装有动力装置的尼龙绳索进行驱动,深入地震废墟的各个狭窄空间,将摄像机拍摄到的影像传回以供探测人员了解并控制废墟环境的内部情形。

2. 场景设计
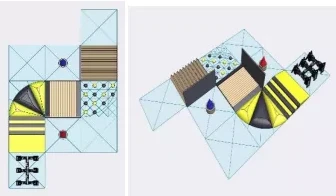
本文参考多个不同种类灾后的探测环境,包括火情过后的工厂、地震过后的房屋废墟、山洪过后的淤泥道路等,设计出五种典型的障碍物地形与三种常见的检测物,并将地形与检测物组合,作为六足灾后巡查机器人演示的实际模拟场景,并对机器人巡检演示路径进行了规划。
2.1 障碍物地形设计
本文设计的六足灾后巡检救援机器人目的是可以克服多种障碍地形,这里对五种灾后常见的障碍地形从样式、尺寸与选材三个方面进行拟定,并对这些地形的设计进行合理解释说明。
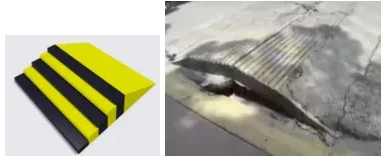
2.1.1 斜面阶梯组合路障
地震后灾区路面承受应力易发生各种形变,其中斜面与阶梯为灾后常见障碍物地形,本文将斜面障碍物与阶梯障碍物组合,设计出了长40cm,宽40cm,最大高度10cm,倾斜角约为15°的斜面阶梯组合路障。此组合障碍以斜面的最低点为起点,沿着斜面向上,达到最大高度,然后沿着五级台阶逐渐下降,台阶均匀分布,每个台阶高 2cm,宽 4cm,长40cm。斜面阶梯组合路障选用硬质合成橡胶材料,其设计图与现场地形对比如下图所示:
2.1.2 软质沟壑路障
洪水或者火场扑灭后地形松软,多为泥沙地质,这与软质沟壑路障的特点相似。选用聚丙烯软质泡沫材料,区域设计以半径为40cm,角度为90°的扇形,扇形边缘高度为2cm,即为最低高度。沿着扇形的边缘按照角度旋转,每15°达到最高高度10cm,继续旋转15°达到最低高度,循环三次通过软质沟壑路障。其设计如图与现场地形图对比如下所示:

2.1.3 组合圆柱体路障
当前村庄的部分建筑结构还是木制的,建筑在经历泥石流、地震或者其他自然灾害后发生房屋倒塌,其留下的建筑废墟存在多条规则圆柱形滚木,木质结构受雨水侵蚀极易发生断裂变形,所以在灾后救援中会给救援人员带来困难,结合圆柱体路障的设计就是模拟该废墟场景。运用15个直径为2cm,长为40cm的圆柱体,和两个相同的棱柱组成。棱柱的长为40cm,底面的直角边分别为3cm和5cm。两边是棱柱,中间是15个圆柱体彼此相切。组合圆柱体路障的圆柱选用木头材质,棱柱选用硬质合成橡胶材料,其设计如图与现场地形图对比如下所示:

2.1.4 仿石砾路障
全球地震频发,地震灾害造成的人员伤亡和经济损失十分惨重。地震后的现场多为凹凸不平的地面,地面上可能出现瓦砾、石块、砖头、土块、各类尖锐细小的金属碎块等多种障碍物。仿石砾路障就是模拟震后铺满瓦砾石块的凹凸不平的地面。仿石砾路障选用自然中的石块(碳酸钙和二氧化硅组成)材质,其设计如图与现场地形图对比如下所示:

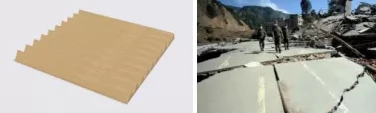
2.1.5 组合三棱柱路障
在地震灾难或者火灾灾难中,硬质地面受地面震动或高温炙烤会形成各种沟壑,地面呈现出凹凸不平状态,有时连续的跨度为救援带来了很大的困难,组合三棱柱路障就是使用10根侧边为边长4cm的等边三角形,总长40cm的三角木条拼接而成的模拟场景,材质是木条。其设计如图与现场地形图对比如下图所示:
2.2 被检测物设计
本文设计的六足灾后巡检救援机器人在克服众多障碍物的过程中,要检测到一些物体或者信号,这时就需要对信号进行接受和检测,同时将信号进行传输,那么这个过程对检测性能是比较高的,检测性能即是在检测到被检测物时,机器人做出的信号接收。下面对被检测物进行设计和说明。
灾难中,电力破环都会引起火灾的发生,较大的火势很容易被检测到,而较小的火势往往可能被忽略,那么机器人对明火的检测显得尤为重要,本文将木制圆柱体和红色木制圆锥体结合体模拟明火。当机器人在路径上前行时,检测到此被检测物,即检测到明火。其设计如下图所示:

据测定,每吸入 1 毫升烟雾,可带进 50 亿烟尘颗粒,加上干热的烟雾刺激,都可破坏呼吸道防御系统,引起咽炎甚至肺癌。在灾难发生后,因此机器人在检测过程中对烟雾的检测十分重要,本文将木制圆柱体和蓝色木制圆锥体结合体模拟烟雾。当机器人在路径上前行时,检测到此被检测物,即检测到烟雾。其设计如下图所示:

从下图中观测到机器人的巡检路径,首先进入斜面阶梯组合路障,检测到右侧有明火接收信号,蜂鸣器被触发后报警;紧接着进入软质沟壑路障,在前进的过程中旋转90°后进入圆柱体组合路障,圆柱体的表面较为光滑,左侧出现烟雾,蜂鸣器再次被触发后报警;然后继续前进进入凹凸不平的仿石砾路障,在前进的过程中逆时针旋转90°进入最后的组合三棱柱路障,跨越高低不同的区域。在巡查的过程中,根据六足灾后巡查机器人发出的报警,可以判断灾区内的环境状况,这样救援队就可以按照机器人给出的信号对灾区的具体情况实行相应的救援措施。

3. 技术路线
3.1 机械结构方案
为实现避障和跨越功能,本文通过文献发现可选择轮式机器人和腿式机器人,其中轮足机器人灵活性差、惯性大,且其PID 调节难以满足复杂环境,因此选择足腿式机器人,同时考虑四足机器人较难实现,同时对比四足腿式结构六足机器人稳定性更强更好控制,因此选择六足步态。
防爆探测六足机器人主要设计为机械结构和电控系统,机械结构主要六足机器人腿部的机构设计,包括腿部关节设计和上层电控板搭建,通过舵机控制完成机器人的“迈腿”和“抬腿”,控制舵机的角度控制机器人抬升和高度,最终舵机之间相互配合完成机器人的行走和转弯。
3.2 检测系统方案
为满足搜救工作机器人核心搭载主控板,通过主控板控制机器人的全部功能和动作,控制系统包括机器人的舵机系统和检测系统,舵机和主板相连控制机器人的行走策略,传感器和主板相连发送数据,并通过检测环境中的烟雾和火焰等危险因素,及时报警防止发生二次事故和灾难。
4. 技术实现
4.1 机械结构
4.1.1 步态选择
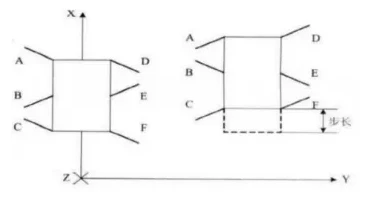
六足步行机器人的步态是多样的,其中三角步态是六足步行机器人实现步行的典型步态。一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。6条腿分布在身体的两侧,身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架,依靠大腿前后划动实现支撑和摆动过程,这就是典型的三角步态行走法,如下图所示。图中机器人的髋关节在水平和垂直方向上运动。此时B、D、F 脚为摆动脚,A、C、E 脚原地不动,只是支撑身体向前。由于身体重心低,不用协调 Z向运动,容易稳定,本文也参考此步态作为机器人行走算法。
4.1.2 结构实现
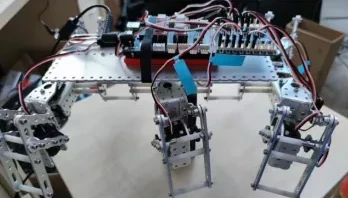
参考仿生学,观察蜘蛛的运动形态,将防爆炸机器人设计为六足步态,主要的爬行机构为机器人“腿”部结构,主要为“胯”关节和“膝”关节。考虑到车轮结构的惯性大以及灵敏度不够,选择舵机配合铝片作为行走机构。考虑到控制和操作的简单性,其中动力机构选择舵机进行控制。同时仿制人的关节设计为两个舵机配合完成“抬腿”和“伸腿”的动作。每条腿两个舵机,共 12 个舵机作为驱动进行控制。具体设计结构如下图所示:
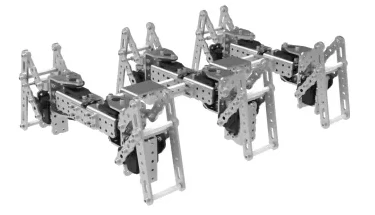
如图,舵机通过和铝片配合构成机器人的“腿”结构,通过上部舵机旋转控制腿的抬起动作,通过左右舵机控制腿的“迈开”动作,六条腿相互配合完成行走动作。
4.2 传感器检测系统
控制部分主要通过主控板控制利用keil进行编程,其中主控板利用stm32F01系列,主要控制分为舵机行走系统,传感器检测系统,和遥控器通讯系统。传感器通过和主控板相连将检测到的信号返回给主控板,主控板接收到信息进行处理从而控制机器人步态,完成机器人行走和避障。其中地震环境复杂多变,因此需要不同传感器进行相互配合进行传输信号。
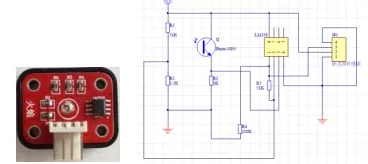
4.2.1 火焰传感器
火焰传感器是机器人专门用来搜寻火源的传感器,当然火焰传感器也可以用来检测光线的亮度,利用红外线对对火焰非常敏感的特点,使用特制的红外线接受管来检测火焰,然后把火焰的亮度转化为高低变化的电平信号,输入到中央处理器中,中央处理器根据信号的变化做出相应的程序处理。火焰传感器既可以作为数字量传感器使用,也可以作为模拟量传感器使用,如下图所示:
传感器和主板链接,将采集到的信号发送到主控板,主控板接受之后判断信息,将火焰传感器开关信号输出引脚与扩展板的PA0接口连接:在串口助手中可以读取到数据。传感器触发输出0,否则输出1。低电平时传感器触发。 从而操控机器人行走。
将传感器接入PA1,通过串口助手查看传感器数值,传感器触发状态下数值接近0,非触发状态下接近1024。观察串口监视器的模拟量输出。将传感器接在扩展板的PA0接口上,直流电机接在A口上。工作温度为-25摄氏度~85摄氏度,在使用过程中应注意火焰探头离火焰的距离不能太近,以免造成损坏。火焰传感器采集数据时,既可以数字量采集,也可以模拟量采集。
4.2.2 温湿度传感器
探索者温湿度传感器,如下图所示,采用DHT11数字温湿度检测模块,是一款含有已校准数字信号输出的温湿度复合传感器,传感器包括一个电阻式感湿元件和一个NTC测温元件,具有品质卓越、抗干扰能力强、性价比极高等优点。相对湿度和温度测量,全部校准,数字输出,卓越的长期稳定性,超低能耗。温湿度传感器对时序的要求比较高。

传感器和主板链接,将采集到的信号发送到主控板,主控板接受之后判断信息,从而操机器人行走。写程序的时候数据的采集必须间隔1s以上,不然采集会失败。
4.2.3 近红外传感器
近红外传感器,如下图所示,是一种开关量传感器,主要用于机器人避障、跟随,目标、障碍等物体的检测。它可以检测到前方是否有物体存在,当检测到有物体存在时,传感器输出口会输出低电平;在未检测到前方有物体时,传感器输出口会输出一个高电平。主控芯片可根据传感器采集的电平高低做出相应的动作指令。

近红外传感器检测数字量,将传感器接在扩展板的PA0接口上,烧录如下程序。在串口助手种可以读取到数据。传感器触发输出0,否则输出1。低电平时传感器触发。效果:接通电源,当近红外传感器检测到障碍物时,控制机器人舵机系统进行驱动,使地震探测机器人避障。
4.3 舵机行走系统
舵机是指在自动驾驶仪中操纵飞机舵面转动的一种执行部件,如下图所示,由电动舵机,由电动机、传动部件和离合器组成。舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小。舵机主要是由外壳、电路板、驱动马达、减速器与位置检测元件所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC 驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。
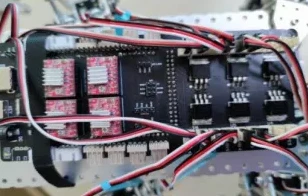
4.4 主控板接线图
舵机控制板并不是机器人的核心,想实现机器人智能化必须要添加另外的主控,本文选择stm32控制板,通过和舵机和传感器进行通讯,将舵机和不同的传感器均连接主板的引脚,通过引脚进行传输指令,主板控制机器人的巡检任务和检测任务,机器人巡检,当机器人遇到烟雾或者火焰时进行报警即蜂鸣器响动,报警之后进行正常巡检,同时检测过程中如果红外检传感器检测到障碍物,机器人进行转弯避障,避障之后进行正常巡检。本文通过 keil 进行编程,对每条腿的两个电机进行初始化和角度赋值,通过控制抬腿和迈腿的角度控制机器人进行直行和转弯,从而完成巡检任务,如下图所示:
4.5 机器人维护
机器人采用金属外壳,对击打和撞击有一定的保护作用,在不使用的时候利用干燥的防护套进行保护,防止落灰和腐蚀。在部分关节处可以涂润滑油进行维护。
当机器人在复杂环境时,在其腿部关节套上海绵保护装置,减小震动带来的破坏,对机器人结构进行缓冲和保护。
当机器人状态不稳定时,及时断电防止烧坏主控板,同时降低重心进行维稳。
5. 项目创新点
5.1 复杂地形全方位搜索
从仿生学出发,利用蜘蛛爬行的结构和运动原理,制作六足搜救机器人。六足搜救机器人够突破轮式机器人只能在平地行驶的缺陷,适应各类复杂的险境,实现全方位的移动与探索。其灵活性强易于控制,能够代替人类到达地形复杂、危险系数较高的环境中进行探测。同时六足对比四足机器人更加稳定且好控制,采用舵机代替电机不仅在程序上更加简化同时对比电机的耗电更小更有利于机器人续航增加搜救时间。
5.2 进入狭小空间的检测能力
地震发生后由于被困者往往被掩埋在复杂的倒塌结构下,探测队员很难通过狭小的倒塌缝隙,这给探测工作带来一定的困难。本组制作的六足机器人体型小,可以进入的细小缝隙减少搜索探测的死角,实现全方位探测。
5.3 灾后防爆炸检验
灾后往往因为环境的破坏导致经常会有爆炸事故发生,造成二次伤害,因此检测环境中的烟雾和火焰十分重要,本组研制的六足机器人搭载多种传感器能够携带多种传感器,实现对废墟内图、声、气、温等多种检测,可以更有效的发现防止爆炸事故发生,维护人员安全。
5.4 缩短探测时间,提高探测效率
在地震等自然灾害发生后,探测时间是非常紧迫的,这就要求探测队员在短时间内完成大量的废墟搜索检测工作,这给探测队员的体力和精神上带来了极大的考验,小组设计的机器人可以通过电池补给不分昼夜连续工作,同时机器人可以利用装配的摄像头拍摄图像并将实时图像传回手机,让人类在场外也能实时了解现场情况。
6. 研究前景及其发展
通过多次地震灾后环境的搜救实验与演练,目前地震搜索机器人与探测队员在地震探测现场共同参与灾后探测工作。但是机器人的功能仍需不断改进和完善,未来能在地震现场参与更多更复杂的探测工作。
6.1 增强机器人无线传输信号的稳定性
废墟环境十分复杂、空间狭小、障碍物众多,搜救机器人为操作者传回废墟环境信息带来了一定困难。当机器人进入废墟深处,距离操作者较远,且障碍物较多时,传回的信息信号会出现不同程度的衰减,甚至丢失。因此解决通讯问题是非常重要的问题,通过实现和机器人在灾后废墟环境的通讯是解决机器人灾后探测的重要发展课题。
6.2 提高机器人的续航能力
目前地震搜救机器人采用的电池容量较小,连续工作时间较短。研发团队需要从机器人自身功耗角度进行电池优化,延长其工作时间,同时需要设计机器人低电量状态报警模式,以免机器人在废墟内部行进时由于电量耗尽而停止前进。
6.3 提升机器人机械结构优化
对现有探测机器人本体结构进行优化,提高机器人保持平衡的能力,提高机器人面对复杂路面情况的适应能力。目前的地震灾后环境的搜救实验与演练无法模拟所有地震可能发生的废墟环境,当实际环境更为恶劣复杂时,会影响机器人通过废墟时的能力,给探测工作带来较大困难。
6.4 提升机器人交互模式
对机器人的人机交互技术进行优化,提高机器人的可操控性,将操作方式变得更易掌握,增加可视化的操作界面和操作平台。
参考文献
[1] 张涛,尚红,许建华,刘亢,张媛,王金萍.机器人技术在地震废墟搜索探测中的应用[J].自然灾害学报,2012
[2] 万德松,林兵,秦璇,李文闯.基于“树莓派”的六足搜救机器人[J].电子世界,2021
更多详情请见:【S052】六足灾后探测机器人