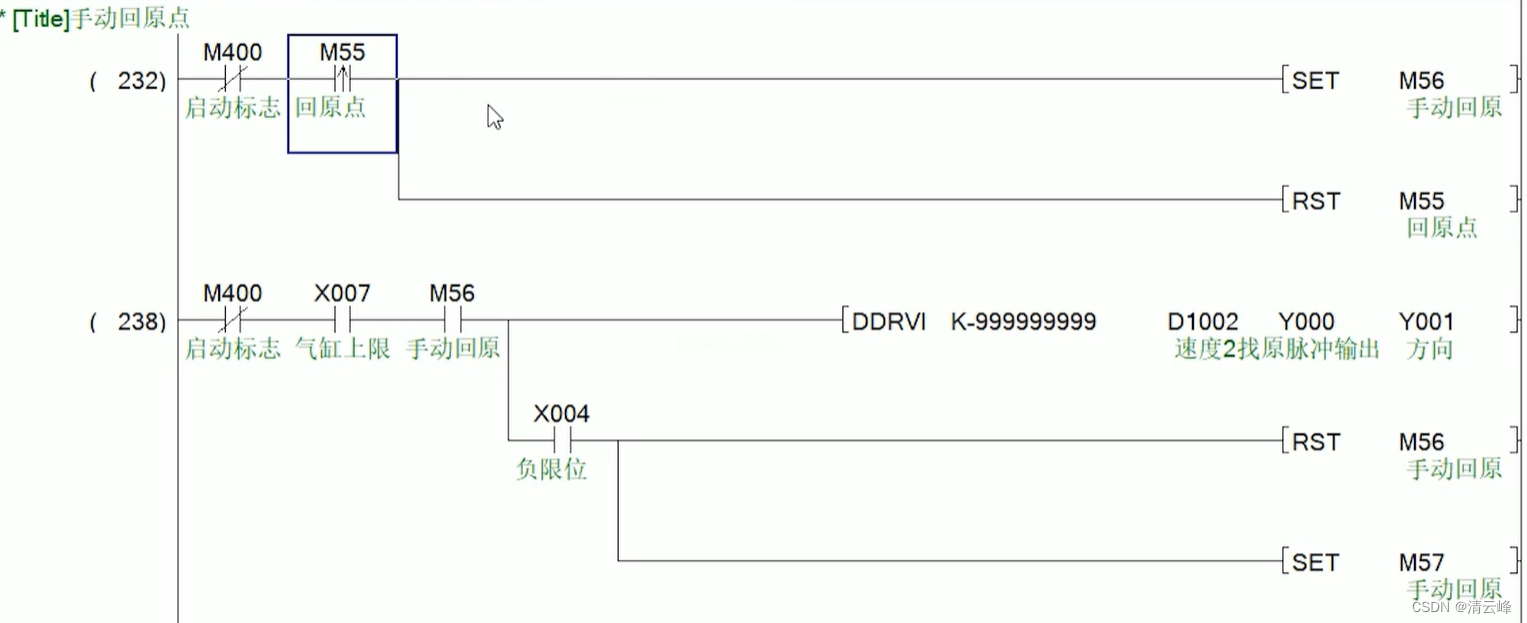
有些应用中不需要使用回原点指令
news2026/2/15 17:09:30
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1369479.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
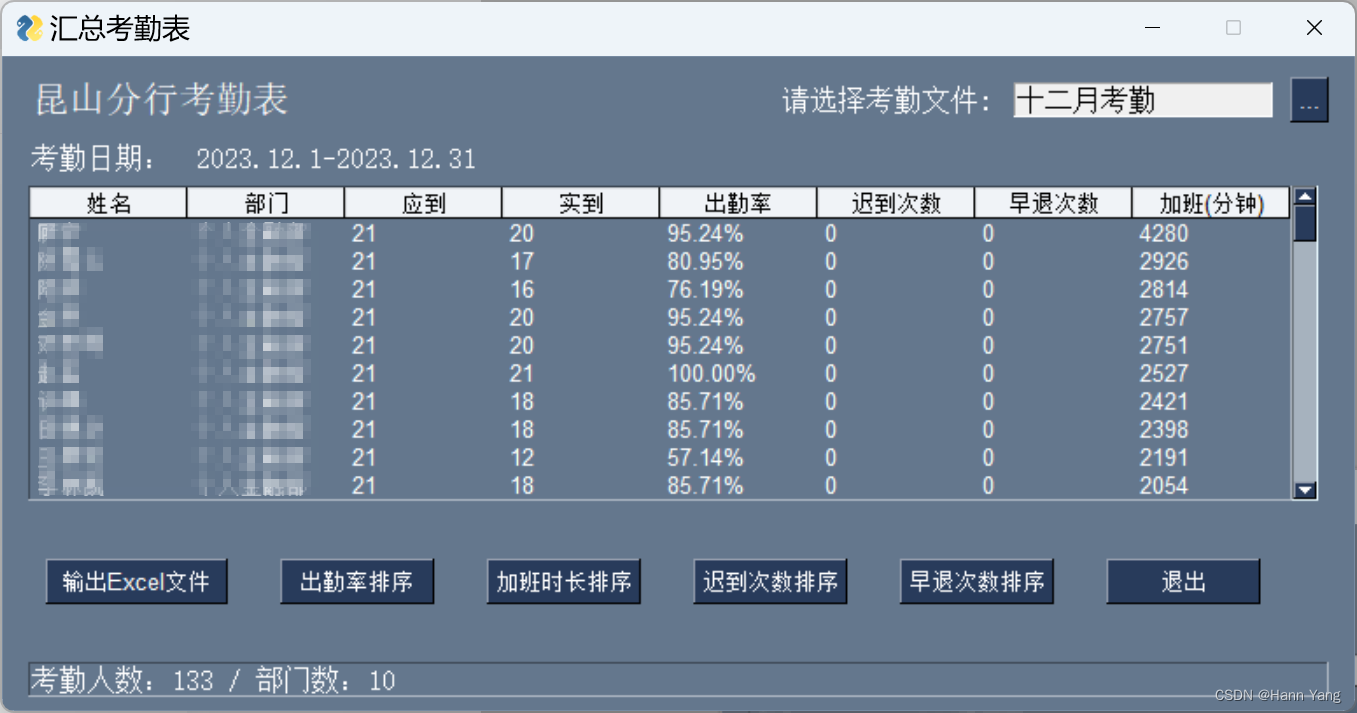
Python异步编程|PySimpleGUI界面读取PDF转换Excel
目录
实例要求
原始pdf文件格式
输出xls文件格式
运行界面
完整代码
代码分析
遍历表格
布局界面
控件简介
写入表格
表格排序
事件循环
异步编程 实例要求
使用PySimpleGUI做一个把单位考勤系统导出的pdf文件合并输出Excel的应用,故事出自࿱…

Java web设计:在线微友圈网站
项目背景
微友圈是一个基于Java Web开发的社交网络平台,旨在为用户提供一个轻松互动、分享生活和交流观点的在线社区。随着社交网络的普及,人们更加渴望与朋友、家人以及其他志同道合的人保持联系并分享彼此的生活点滴。微友圈的目标是打造一个简洁、高…

OpenAI ChatGPT-4开发笔记2024-01:开发环境
ChatGPT发展一日千里。工具、函数少则数日,多则数月就加入了Deprecated行列不再如预期般工作。元旦闲来无事,用最新的ChatGPT重写一下各种开发场景,全部实测通过。
开发环境:
电脑:两台笔记本:HP和MacBoo…
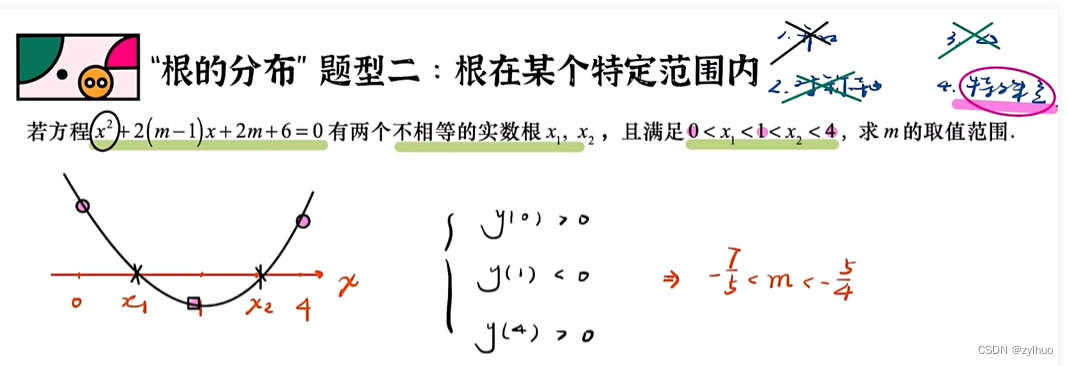
AI-数学-高中-3.二次函数的根的分布问题的解题方法
原作者学习视频:二次】3二次函数根分布问题(中档)_哔哩哔哩_bilibili
一、伟达定理(根与0比较的二次函数) 示例: 二、画图法:
1.开口方向的确定,有的示例可能存在向上、下两种情况…

顺序栈之共享栈实现——C语言
参考书:数据结构教程 第5版 李葆春 P83
#include <stdio.h>
#include <string.h>
#include <stdlib.h>#define MaxSize 10/*共享栈*/
typedef struct
{char data[MaxSize];int top1,top2,len;
}DStack;/*初始化*/
void InitStack(DStack *s){s-…
![[蓝桥杯学习] 树状数组的二分](https://img-blog.csdnimg.cn/direct/b23c16322fa14705bf7b4421eceed3af.png)
[蓝桥杯学习] 树状数组的二分
要解决这个问题,插入和删除可以用STL实现,2操作如果用树状数组实现的话,将数的值作为树状数组的下标,即值域。
树状数组有两种操作,一个是更新某点的值,另一个是求区间和。 mid (lr)/2 ,求和 …
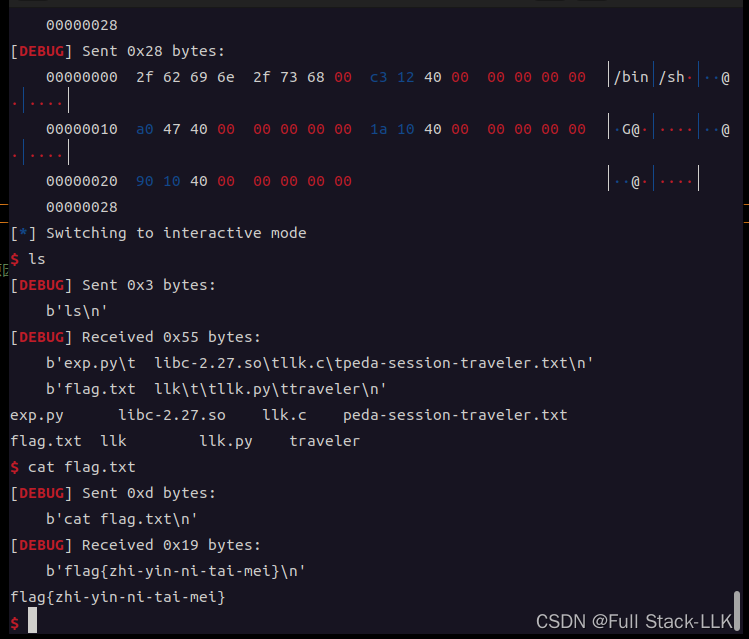
CTF-PWN-栈溢出-中级ROP-【栈迁移】
文章目录 栈迁移具体流程 VNCTF 2023 traveler libc-2.27检查源码main函数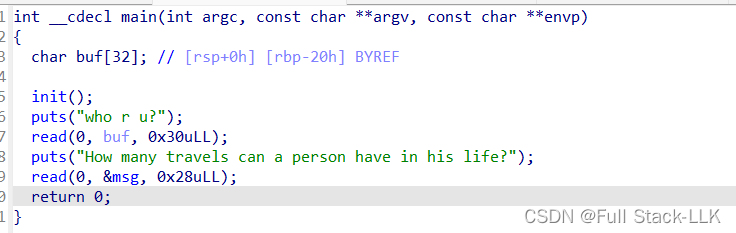全局变量地址局部变量地址 PIE保护开启PIE关闭PIE 思路exp 栈迁移参考 栈迁移参考 栈迁移
顾名思义…
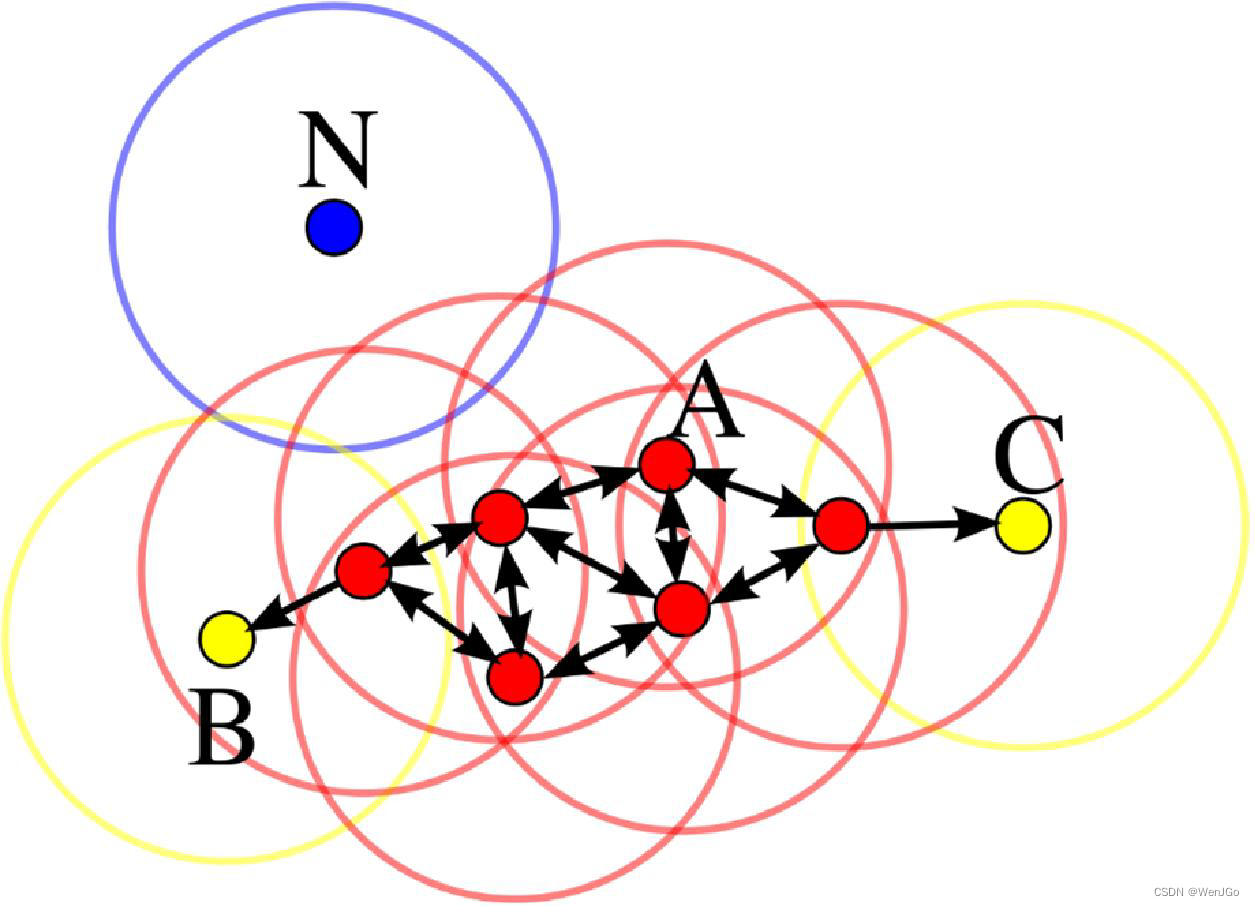
数模学习day10-聚类模型
说明,本文部分图片和内容源于数学建模交流公众号
目录
K-means聚类算法
K-means聚类的算法流程:
图解
算法流程图
评价
K-means算法
基本原则
算法过程
Spss软件操作
K-means算法的疑惑
系统(层次)聚类
算法流程
Sp…
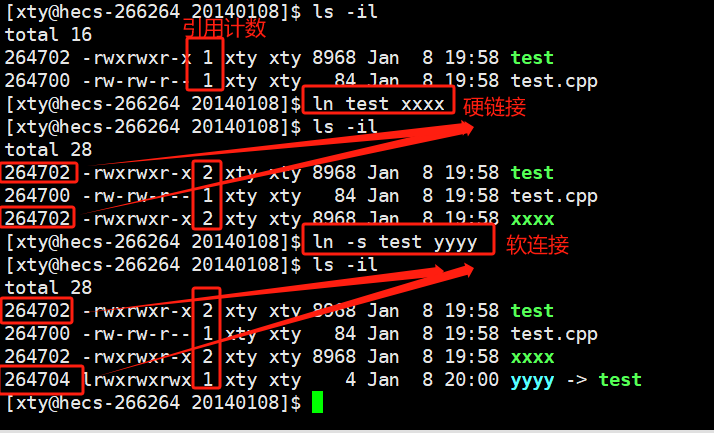
linux系统基础知识-基础IO
IO 概念引入位图的概念IO的系统调用函数openwriteread()close简单使用样例: 文件描述符fd默认文件流stdin/stdout/stderr文件描述符的分配规则 重定向的概念输出重定向输入重定向追加重定向dup2()系统调用总结 文件缓冲区深入理解缓冲区的概念输出缓冲区部分代码解释…

基于ssm的儿童影楼拍摄管理系统的设计与实现+vue论文
基于SSM的儿童影楼拍摄管理系统的设计与实现
摘 要 当下,正处于信息化的时代,许多行业顺应时代的变化,结合使用计算机技术向数字化、信息化建设迈进。以前相关行业对于商品信息的管理和控制,采用人工登记的方式保存相关数据&…
实时云渲染是什么?它的应用方向有哪些?
实时云渲染有三个关键词,"实时"、"云"和"渲染",它们分别表示:同步、云服务器计算和图像生成过程,简单来说就是使用第三方平台快速完成渲染任务,它有两个实用方向: 一、实时渲…
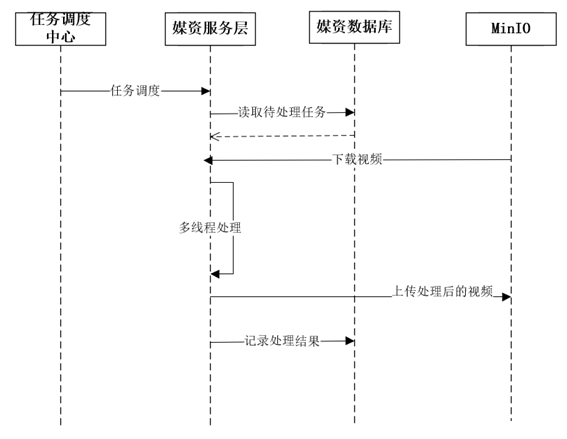
4.4 媒资管理模块 - 分布式任务处理介绍、视频处理技术方案
媒资管理模块 - 视频处理 文章目录 媒资管理模块 - 视频处理一、视频转码1.1 视频转码介绍1.2 FFmpeg 基本使用1.2.1 下载安装配置1.2.2 转码测试 1.3 工具类1.3.1 VideoUtil1.3.2 Mp4VideoUtil1.3.3 测试工具类 二、分布式任务处理2.1 分布式任务调度2.2 XXL-JOB 配置执行器 中…
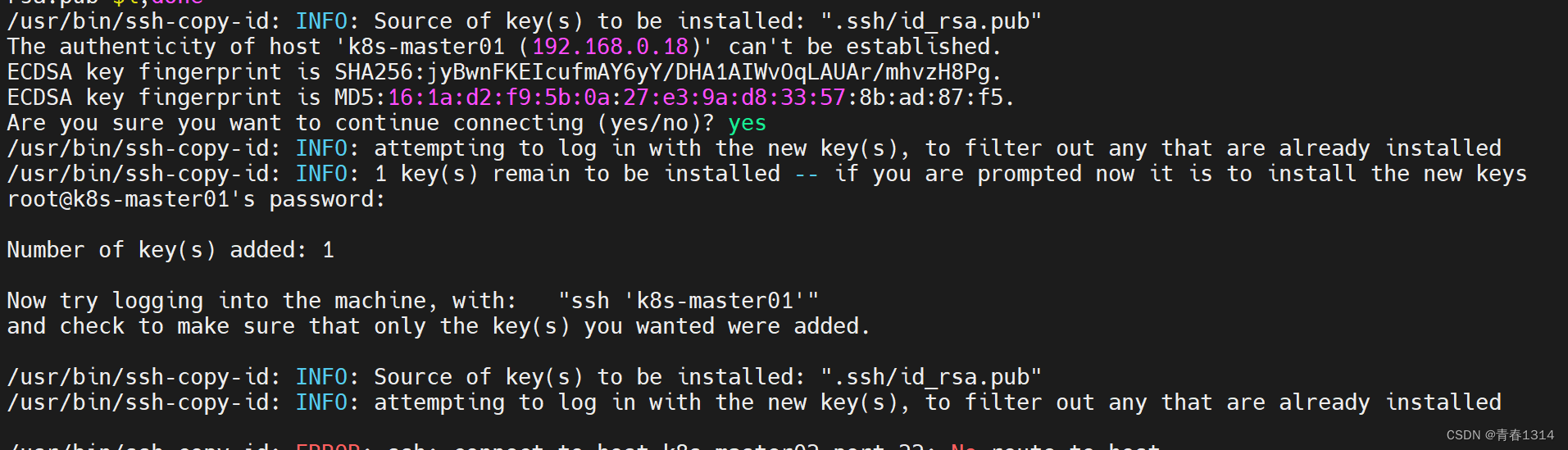
Master01节点免密钥登录其他节点
1、执行命令 ssh-keygen -t rsa,一直敲回车 2、for i in k8s-master01 k8s-node01 k8s-node02;do ssh-copy-id -i .ssh/id_rsa.pub $i;done
输入yes和对应节点密码
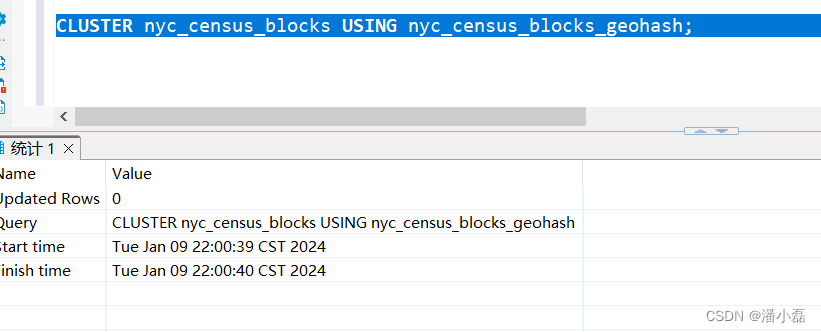
PostGIS教程学习十九:基于索引的聚簇
PostGIS教程学习十九:基于索引的聚簇
数据库只能以从磁盘获取信息的速度检索信息。小型数据库将完全位于于RAM缓存(内存),并摆脱物理磁盘访问速度慢的限制。但是对于大型数据库,对物理磁盘的访问将限制数据库的信息检…
在VS Code中安装Copilot与安装其他扩展的方法一样,只需简单几步
GitHub Copilot是由OpenAI和GitHub开发的人工智能工具。它的目的是通过自动完成代码来帮助开发人员使用集成开发环境(IDE),如Visual Studio Code。它目前仅作为技术预览版提供,因此只有在候补名单上被认可的用户才能访问它。对于用…
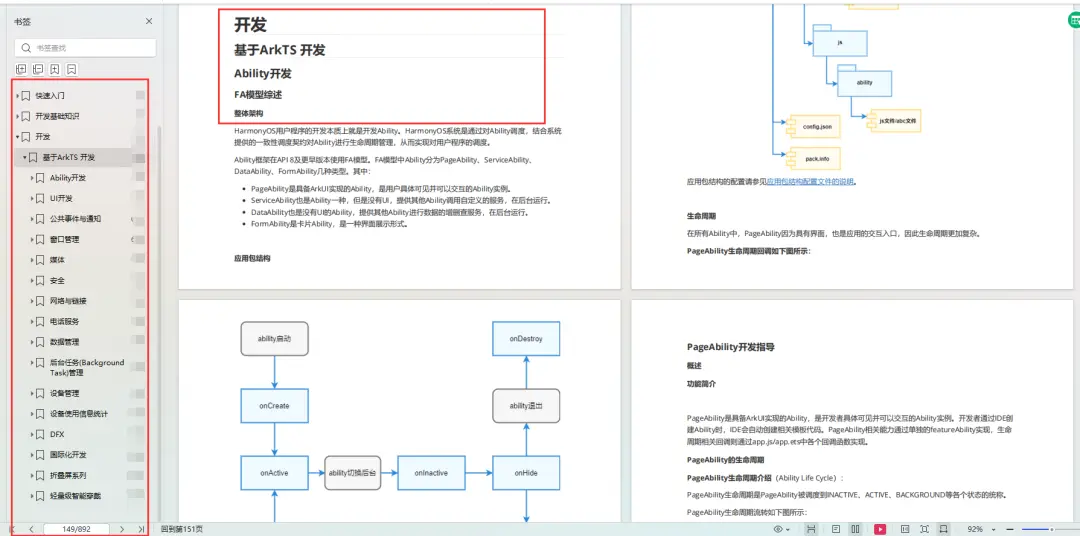
纯血鸿蒙「扩圈」100天,酝酿已久的突围
坦白讲,去年参加华为开发者大会看到HarmonyOS NEXT(仅运行鸿蒙原生应用,所以也称作「纯血鸿蒙」)的时候,小雷也没料想到鸿蒙原生应用生态的发展速度会如此之快。 9月25日,华为正式对外宣布启动HarmonyOS NE…
PTA✨C语言 就不告诉你
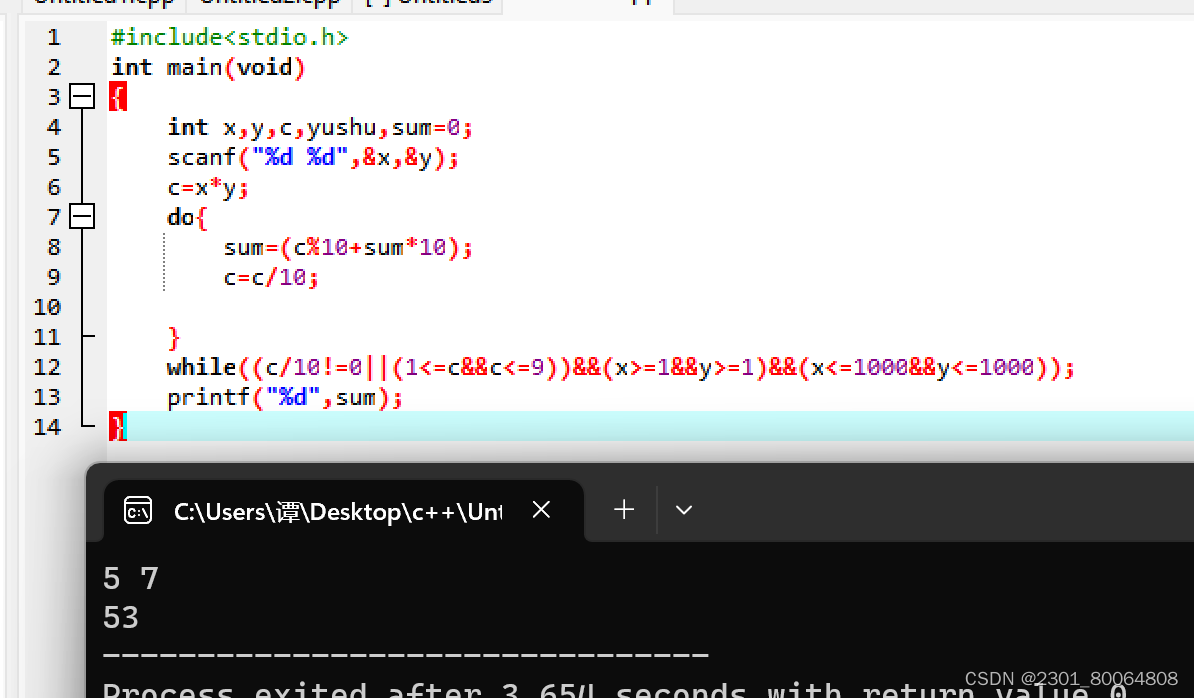
7-7 就不告诉你
分数 15 全屏浏览题目 切换布局
作者 CHEN, Yue
单位 浙江大学
做作业的时候,邻座的小盆友问你:“五乘以七等于多少?”你应该不失礼貌地围笑着告诉他:“五十三。”本题就要求你,对任何一对给定的正…

2024年美国大学生数学建模思路 - 复盘:人力资源安排的最优化模型
文章目录 0 赛题思路1 描述2 问题概括3 建模过程3.1 边界说明3.2 符号约定3.3 分析3.4 模型建立3.5 模型求解 4 模型评价与推广5 实现代码 建模资料 0 赛题思路
(赛题出来以后第一时间在CSDN分享)
https://blog.csdn.net/dc_sinor?typeblog
1 描述
…