本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-自动控制原理Ch1-7Lead Compensator超前补偿器(调节根轨迹)
- 1. Plot Rootlocus 绘制根轨迹
- 2. System Performance 系统表现
- 3. 改善/加快收敛速度
- 4. 超前补偿器 Lead Comperastor

1. Plot Rootlocus 绘制根轨迹
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1

2. System Performance 系统表现
输入Input —— δ ( t ) \delta \left( t \right) δ(t) 单位冲激
-
K
K
K 较小时,
p
1
,
p
2
p_1,p_2
p1,p2 :
x
(
t
)
=
c
1
e
p
1
t
+
c
2
e
p
2
t
,
p
1
<
0
,
p
2
<
0
x\left( t \right) =c_1e^{p_1t}+c_2e^{p_2t},p_1<0,p_2<0
x(t)=c1ep1t+c2ep2t,p1<0,p2<0

-
K
K
K 较大时,根在复平面:
p
1
,
p
2
p_1,p_2
p1,p2 :
x
(
t
)
=
c
e
−
t
sin
ω
n
t
x\left( t \right) =ce^{-t}\sin \omega _{\mathrm{n}}t
x(t)=ce−tsinωnt - 无论如何改变
K
K
K值,都无法改变收敛速度
-
3. 改善/加快收敛速度
——改变根轨迹,希望根在
−
2
+
2
3
-2+2\sqrt{3}
−2+23
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1
在根轨迹上的点满足:
∠
K
G
(
s
)
=
−
π
\angle KG\left( s \right) =-\pi
∠KG(s)=−π (零点到根的夹角和 - 极点到根的夹角和)
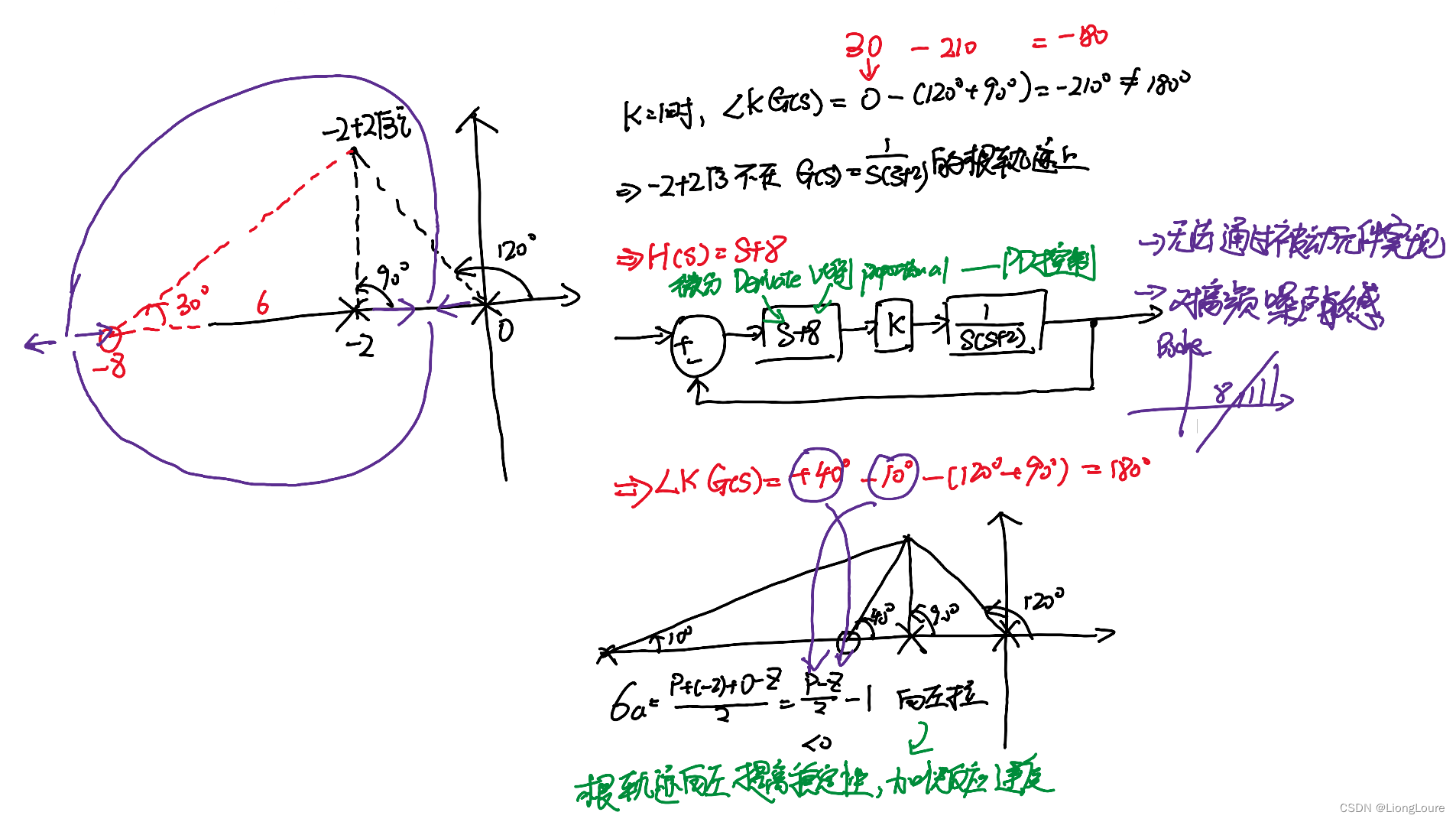
4. 超前补偿器 Lead Comperastor
H
(
s
)
=
s
−
z
s
−
p
,
∥
z
∥
<
∥
p
∥
H\left( s \right) =\frac{s-z}{s-p},\left\| z \right\| <\left\| p \right\|
H(s)=s−ps−z,∥z∥<∥p∥