ROS2第一个节点
- 引言
- 1 认识ROS2节点
- 1.1 节点之间的交互
- 1.2 节点的命令行指令
- 1.3 工作空间
- 1.4 功能包
- 1.4.1 功能包获取安装
- 1.4.2 功能包相关的指令 ros2 pkg
- 2 ROS2构建工具—Colcon
- 2.1 安装Colcon
- 2.2 测试编译
- 2.3 Colcon其他指令
- 3 使用RCLPY编写节点
- 3.1 创建Python功能包
- 3.2 编写程序
- 3.3 编译运行节点
引言
笔者跟着鱼香ROS的ROS2学习之旅
学习参考:
【ROS2机器人入门到实战】
笔者的学习目录
- MOMO的鱼香ROS2(一)ROS2入门篇——从Ubuntu操作系统开启
- 【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
专业术语认识
- 面向过程编程思想。缩写:POP
- 面向对象编程思想。缩写:OOP
对象 = 属性+行为 - 函数式思想。缩写:FP
1 认识ROS2节点
1.1 节点之间的交互
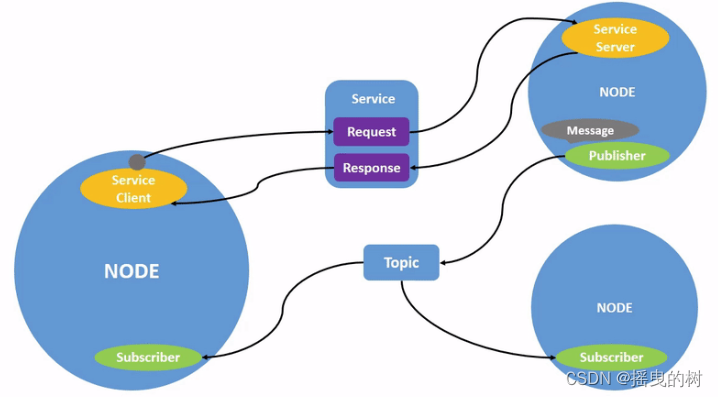
ROS2中每一个节点也是只负责一个单独的模块化的功能,(比如一个节点负责控制车轮转动,一个节点负责从激光雷达获取数据、一个节点负责处理激光雷达的数据、一个节点负责定位等等)
那节点与节点之间的通信一共四种通信方式:
- 话题-topics
- 服务-services
- 动作-Action
- 参数-parameters
1.2 节点的命令行指令
运行节点指令:ros2 run 包名字 可执行文件名字
ros2 run <package_name> <executable_name>
查看节点列表
ros2 node list
查看节点信息
ros2 node info <node_name>
其他指令
# 重映射节点名称
ros2 run turtlesim turtlesim_node --ros-args --remap __node:=my_turtle
# 运行节点时设置参数
ros2 run example_parameters_rclcpp parameters_basic --ros-args -p rcl_log_level:=10
1.3 工作空间
创建工作空间(其实就是创建一个目录)
mkdir -p name_ws/src
1.4 功能包
功能包可以理解为存放节点的地方,ROS2中功能包根据编译方式的不同分为三种类型。
ament_python,适用于python程序
cmake,适用于C++
ament_cmake,适用于C++程序,是cmake的增强版
1.4.1 功能包获取安装
sudo apt install ros-<version>-package_name
1.4.2 功能包相关的指令 ros2 pkg
1.创建功能包
ros2 pkg create <package-name> --build-type {cmake,ament_cmake,ament_python} --dependencies <依赖名字>
2.列出可执行文件
ros2 pkg executables
3.列出所有的包
ros2 pkg list
4.输出某个包所在路径的前缀
ros2 pkg prefix <package-name>
5.查看功能包的信息。
ros2 pkg xml <package-name>
2 ROS2构建工具—Colcon
对创建的ROS2工作空间进行编译,colcon想当于ros1中的catkin工具。
2.1 安装Colcon
sudo apt-get install python3-colcon-common-extensions
打开终端输入colcon即可看到其使用方法
2.2 测试编译
- 创建一个工作文件夹
mkdir -p ROS_WS/colcon_ws/src
cd ROS_WS/colcon_ws/src
# -b eloquent克隆的分支为eloquent
git clone https://github.com/ros2/examples -b eloquent
- 编译
colcon build
# 指定包编译
colcon build --packages-select [YOUR_PKG_NAME]
允许通过更改src下的部分文件来改变install(重要),每次调整 python 脚本时都不必重新build了
colcon build --symlink-install
运行编译的包的测试
colcon test
- 配置资源
source install/setup.bash
2.3 Colcon其他指令
构建指令
–packages-select ,仅生成单个包(或选定的包)。
–packages-up-to,构建选定的包,包括其依赖项。
–packages-above,整个工作区,然后对其中一个包进行了更改。此指令将重构此包以及(递归地)依赖于此包的所有包。
指定构建后安装的目录可以通过 --build-base参数和–install-base,指定构建目录和安装目录。合并构建目录
–merge-install,使用作为所有软件包的安装前缀,而不是安装基中的软件包特定子目录。
–install-base 如果没有此选项,每个包都将提供自己的环境变量路径,从而导致非常长的环境变量值。使用此选项时,添加到环境变量的大多数路径将相同,从而导致环境变量值更短。符号链接安装
启用–symlink-install后将不会把文拷贝到install目录,而是通过创建符号链接的方式。错误时继续安装
启用–continue-on-error,当发生错误的时候继续进行编译。CMake参数
–cmake-args,将任意参数传递给CMake。与其他选项匹配的参数必须以空格为前缀。控制构建线程
–executor EXECUTOR,用于处理所有作业的执行程序。默认值是根据所有可用执行程序扩展的优先级选择的。要查看完整列表,请调用 colcon extensions colcon_core.executor --verbose。
sequential [colcon-core] 一次处理一个包。
parallel [colcon-parallel-executor] 处理多个作业平行.
–parallel-workers NUMBER 要并行处理的最大作业数。默认值为 os.cpu_count() 给出的逻辑 CPU内核数。开启构建日志 使用–log-level可以设置日志级别,比如–log-level info。
3 使用RCLPY编写节点
3.1 创建Python功能包
cd ROS_WS/colcon_ws/src
ros2 pkg create imu_py --build-type ament_python --dependencies rclpy
具体解释如下:
ros2 pkg create imu_py: 创建 ROS 2 包的命令,包的名称为 “imu_py”。
–build-type ament_python: 指定使用 Ament 构建系统,并选择 Python 作为开发语言。
–dependencies rclpy: 指定该包的依赖项,即 “rclpy”,这是 ROS 2 的 Python 客户端库。
3.2 编写程序
- 导入库文件
- 初始化客户端库
- 新建节点
- spin循环节点
- 关闭客户端库
在imu_py/imu_py下创建node_imu.py,开始编写代码。
插上usb接口的IMU硬件!!!
# -*- coding: utf-8 -*-
"""
Created on 2023/12/6 下午4:46
@author: alian
1.查看映射端口
ls /dev/ttyUSB*
2.更改端口的权限
sudo chmod 777 /dev/ttyUSB0
3.可视化
ros2 run rviz2 rviz2
4. ROS2重要指令
colcon build --packages-select imu_py # 编译
source install/setup.bash
ros2 run imu_py node_imu # 运行节点
"""
import rclpy
from rclpy.node import Node
# 话题接口
from sensor_msgs.msg import Imu # imu接口
from sensor_msgs.msg import LaserScan # 激光雷达接口
from sensor_msgs.msg import Image # 相机接口
# Usart Library
import serial
import struct
import binascii
# imu接收数据类型
class Node_imu(Node):
send_data = []
def __init__(self,name):
super().__init__(name) # 继承父类,初始化名称
self.get_logger().info("发布节点:%s"%name)
self.publisher_ = self.create_publisher(Imu, 'imu_data', 1) # 创建发布imu数据的发布者到话题:imu_data上
# 串口初始化
self.IMU_Usart = serial.Serial(
port='/dev/ttyUSB0', # 串口
baudrate=115200, # 波特率
timeout=0.001 # 由于后续使用read_all按照一个timeout周期时间读取数据
# imu在波特率115200返回数据时间大概是1ms,9600下大概是10ms
# 所以读取时间设置0.001s
)
# 判断串口是否打开成功
if self.IMU_Usart.isOpen():
print("open success")
else:
print("open failed")
def main(args=None):
"""
ros2运行该节点的入口函数
编写ROS2节点的一般步骤
1. 导入库文件
2. 初始化客户端库
3. 新建节点对象
4. spin循环节点
5. 关闭客户端库
"""
rclpy.init(args=args) # 初始化rclpy
node = Node_imu("imu_publisher") # 新建一个节点
node.get_logger().info("大家好,我是node_imu.")
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
代码编写完成用Crtl+S进行保存。接着修改setup.py。
from setuptools import setup
package_name = 'imu_py'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ll',
maintainer_email='ll@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
"node_imu=imu_py.node_imu:main", # 在这里修改!!!!!!
# "node_imu=imu_py.node_imu:main" # 可以发布多个节点
],
},
)
“node_imu=imu_py.node_imu:main”,解释如下:
node_imu:节点名称
imu_py.node_imu:main:【软件包】.【执行文件.py】:【执行函数mian】
setup.py这段配置是声明一个ROS2的节点,声明后使用colcon build才能检测到,从而将其添加到install目录下。
3.3 编译运行节点
# 回到工作空间
cd ROS_WS/colcon_ws/src
colcon build --packages-select imu_py
source install/setup.bash
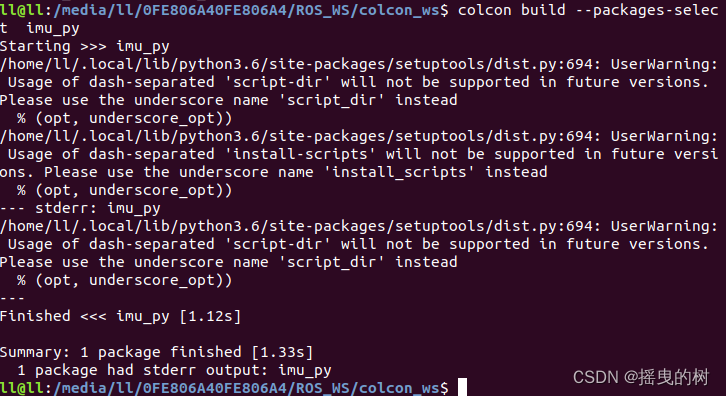
运行的软件包和节点名可以通过查看软件包的setup.py
ros2 run imu_py node_imu