要查询信息,涉及两个问题:
在哪里查?——查找表
怎么查?——查找方法
一.查找
1.查找表的定义:
查找表是由同类型的数据元素构成的集合
2.对查找表的基本操作:
1)查询某个数据元素是否在查找表中
2)检索某个数据元素的各种属性
3)在查找表中插入一个数据元素
4)从查找表中删除某个元素
3.查找表的分类:
静态查找表:
仅作查询和检索操作的查找表
动态查找表:
可以进行“插入”和“删除”操作
4.关键字:
关键字:是数据元素中某个数据项的值,用以标识一个数据元素。
主关键字:若关键字能标识唯一的一个数据元素
次关键字:若关键字能标识若干个数据元素
5.查找:
根据给定的某个值,在查找表中确定一个其关键字等于给定值的数据元素。
6.查找方法评价:
- 算法本身的时间复杂度
- 临时变量占用存储空间的多少
- 平均查找长度ASL(Average Search Length)
对于含有n个记录的表,
其中,为查找表中第i个元素的概率,
为找到表中第i个元素所需要比较的次数
7. 顺序表的查找:
7.1 基本思想:
从表中指定位置的记录开始,沿着某个方向将记录的关键字与给定值相比较,若某个记录的关键字与给定值相同,则查找成功。
反之,若找完整个顺序表,都没有与给定关键字值相同的记录,则查找失败。
7.2 顺序查找的性能分析:
查找第n个元素:1次
查找第n-1个元素:2次
...
查找第1个元素:n次
查找第i个元素:n+1-i次
查找失败:n+1次
空间复杂度:
需要一个辅助空间R[0]
时间复杂度:

等概率情况下:
平均情况:
优点:算法简单,适用面广
缺点:平均查找长度较大
8.折半查找
8.1 基本思想:
查找过程:每次将待查记录所在区间缩小一半。
适用条件:采用顺序存储的有序表
8.2 伪代码:
设表长为n,low、high和mid分别指向待查元素所在区间的上界、下界和中点,k为给定值。
初始时,令low=0,high=n-1,mid=(high+low)/2。
让k与mid指向的记录比较
- 若k==r[mid].key 查找成功
- 若k<r[mid].key 则high=mid-1
- 若k>r[mid].key 则low=mid+1
重复上述操作,直至low>high为止,查找失败。
int biserach(int r[],int n,int k){
int low=0,high=n-1,mid=0;
while(low<=high){
mid=(low+high)/2;
if(r[mid]==k){
break;
}
else if(r[mid]>k){
high=mid-1;
}
else{
low=mid+1;
}
}
if(low>high){
return -1;
}
else{
return mid;
}
}8.3 算法性能分析:
判定树:描述查找过程的二叉树
有n个结点的判定树的层次数为
折半查找在查找过程中进行的比较次数最多不超过其判定树的深度。
折半查找的ASL:
设表长为,
,即判定树为深度为h的满二叉树
设表中每个记录的查找概率相等
8.4 折半查找的特点:
1)查找效率高
2)平均查找性能和最坏性能相当接近
3)要求查找表为有序表
4)只适用于顺序存储结构
9.索引表查找
9.1 索引表的构建
数据分块:
按关键字分成若干块,达到分块有序。
建索引项:
每一个块建立一个索引项,每个索引项包含最大关键字项,块的起始地址。
组成索引表:
所有索引项组成索引表
9.2 索引表的查找:
索引表内查找:确定关键字所在区块。
查找表内查找:查找表的某个块内查找
9.3 索引表查找的代码实现:
typedef struct{
int key;
int link;
}SD;
typedef struct{
int key;
float info;
}JD;
int block_search(JD r[],SD nd[],int b,int k,int n){//n个记录分成b块
int i=0,j;
while(k>nd[i].key&&i<b){
i++;
}
if(i>=b){
cout<<"not found"<<endl;
return -1;
}
else{
//在块内顺序查找
j=nd[i].link;
while(j<n&&k!=r[j].key){
j++;
}
if(k!=r[j].key){
cout<<"not found"<<endl;
return -1;
}
else{
return j;
}
}
}9.4 分块查找方法评价:
若将表长为n的表平均分成b块,每块含有s个记录,并设表中每个记录的查找概率相等。
则有:
1)用顺序查找确定所在块:
2)用折半查找确定所在块:
10.查找方法比较
| 顺序查找 | 折半查找 | 索引查找 | |
| ASL | 最大 | 最小 | 两者之间 |
| 表结构 | 有序表、无序表 | 有序表 | 分块有序表 |
| 存储结构 | 顺序存储、单链表 | 顺序存储 | 顺序存储、单链表 |
11.哈希表查找
ASL=1的查找算法。
如果可以确定关键字与存储位置的对应关系,就有可能让ASL=1.
11.1 哈希查找的基本定义:
哈希函数:在记录的关键字与记录的存储地址之间建立的一种对应关系
哈希查找:又叫散列查找,利用哈希函数进行查找的过程。
哈希函数是一种映射,即从关键字空间到存储地址空间的一种映射。
哈希函数可以写成:
11.2 冲突
哈希函数通常是一种压缩映射,所以冲突不可避免。
冲突发生后,应该有处理冲突的方法。
(1)直接定址法(线性函数):
例如:H(key)=key-1948
直接定址法所得地址集合与关键字集合大小相等,不会发生冲突。
(2)数字分析法:
对关键字进行分析,取关键字的若干位或其组合作为哈希地址。
适用于关键字位数比哈希地址位数大,且可能出现的关键字事先知道的情况。
(3)平方取中法:
取关键字平方后的中间几位作为哈希地址
为什么要取关键字的平方值?
- 扩大差别
- 均衡贡献
(4)折叠法:
将关键字分割为位数相同的几部分,然后取这几部分的叠加和(舍去进位)作哈希地址。
适用于关键字位数很多,且每一位上数字分布大致均匀的情况
例如: 关键字为 04 4220 5864 哈希地址位数为4
移位叠加: 间界叠加:
5 8 6 4 5 8 6 4
4 2 2 0 0 2 2 4
0 0 0 4 0 0 0 4
---------------------------------------------------------------------------
(5)除留余数法:
H(key)=key MOD p,p<=m,m为hash表长。
p选取不好,容易产生同义词,通常选取一个质数。
(6)伪随机数法
取关键字的随机函数作哈希地址值,即:H(key)=random(key)
适用于关键字长度不等的情况。
11.3 选取哈希函数需要考虑的因素:
1)计算哈希函数所需的时间
2)关键字长度
3)哈希表长度
4)关键字分布情况
5)记录的查找频率
11.4 冲突处理
为出现哈希地址冲突的关键字寻找下一个新的哈希地址。
(1)开放定址法:
当冲突发生时,形成一个探查序列,沿着此序列逐个地址探查,直到找到一颗空位置,将发生冲突的记录放入该地址中,即
m 哈希表表长,di 增量序列。
增量序列分类:
线性探测再散列 di=1,2,3,...,m-1
平方探测再散列
伪随机探测再散列 di=伪随机数序列
例:

(2)再哈希法:
构造若干个哈希函数,当发生冲突时,计算下一个哈希地址。
(3)链地址法:
将所有关键字为同义词的记录存储在一个单链表中,并用一位数组存放头指针。
(4)公共溢出区法
假设某哈希函数的值域为[o,m-1]
向量HashTable[0,m-1]为基本表,每个分量存放一个记录,另设一个向量OverTable[0,v]为溢出表。将与基本表中的关键字发生冲突的所有记录都填入溢出表中。
11.5 例题分析
已知一组关键字(19,14,23,1,68,20,84,27,55,11,10,79)
哈希函数为H(key)=key MOD 13 ,哈希表长为16,设每个记录的查找概率相等。
1)线性探测再散列处理冲突
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 14 | 1 | 68 | 27 | 55 | 19 | 20 | 84 | 79 | 23 | 11 | 10 |
1 1 1 2 1 1 3 4 3 1 3 9
ASL=30/12=2.5
2)链地址法处理冲突
ASL=(6*1+4*2+1*3+1*4)/12=1.75
11.6 哈希查找分析
哈希查找过程仍然是一个给定值与关键字进行比较的过程
评价哈希查找仍要用ASL
哈希查找过程与给定值进行关键字比较的次数取决于:
- 哈希函数
- 处理冲突的方法
- 哈希表的装载因子
k:表中填入的记录数
L:哈希表长度
二.排序
1.内部排序的方法:
内部排序的过程是一个逐步扩大有序区记录的过程
2.排序分为:
- 稳定排序
- 不稳定排序
3.直接插入排序(稳定):
3.1 基本思想:
先将序列中第一个记录看成是一个有序子序列,然后从第二个记录开始,逐个进行插入,直至整个序列有序。整个排序过程为n-1躺插入。
3.2 具体例子:
i=1 49 38 65 97 76 13 27
i=2 38 49 65 97 76 13 27
i=3 38 49 65 97 76 13 27
i=4 38 49 65 97 76 13 27
i=5 38 49 65 76 97 13 27
i=6 13 38 49 65 97 76 27
i=7 13 27 38 49 65 76 97
3.3 代码实现:
void insert_select(int r[],int n){
int i,j,temp;
for(i=1;i<n;i++){
temp=r[i];
j=i-1;
while(temp<r[j]){
r[j+1]=r[j];
--j;
}
r[j+1]=temp;
}
}3.4 算法评价:
时间复杂度:
空间复杂度:
4.折半插入排序(稳定)
4.1 基本思想:
用折半查找方法确定插入位置的排序
4.2 算法分析:
时间复杂度:
空间复杂度:
5.希尔排序(缩小增量法)(非稳定)
5.1 基本思想:
希尔排序是对插入排序的改进。
(1) 插入排序对几乎已排好序的数据操作时,效率很高,可以达到线性排序的效率。
(2) 插入排序在每次往前插入时只能将数据移动一位,效率比较低。
先将整个待排元素序列分割成若干个子序列(由相隔某个“增量”的元素组成的)。分别进行直接插入排序,然后依次缩减增量再进行排序,待整个序列中的元素基本有序(增量足够小)时,再对全体元素进行一次直接插入排序。
局部有序不能提高直接插入排序算法的时间性能
5.2 代码实现:
void shell_sort(int r[],int n){
int di=n/2,i,j,temp;
while(di>=1){
for(i=di;i<n;i++){
j=i-di;
temp=r[i];
while(temp>r[j]&&j>=0){
r[j+di]=r[j];
j-=di;
}
r[j+di]=temp;
}
di/=2;
}
}5.3 性能分析:
时间复杂度:
空间复杂度:
S(1)
6.冒泡排序(稳定)
6.1 基本思想:
两两比较相邻记录的关键码,如果反序则交换,直到没有反序的记录为止。
6.2 对冒泡排序的改进:
1)设变量exchange记载记录交换的位置。则一趟排序后,exchange记载的一定是这一趟排序中记录的最后一次交换的位置。且从此位置以后的记录均已有序。
2)设bound位置的记录是无序区的最后一个记录,则每趟冒泡排序的范围是r[0]~r[bound]。
在一趟排序后,从exchange位置之后的记录一定是有序的,所以bound=exchange。
3)令exchange初值为0,在以后的排序中,只要有记录交换,exchange的值就会大于0。则当exchange=0时,冒泡排序结束。
6.3 代码实现:
void buble_sort(int r[],int n){
int exchange=n-1,bound,i,temp;
while(exchange){
bound=exchange;
exchange=0;
for(i=0;i<bound;i++){
if(r[i]>r[i+1]){
temp=r[i];
r[i]=r[i+1];
r[i+1]=temp;
exchange=i;
}
}
}
}6.4 性能分析:
时间复杂度:
空间复杂度:
7.快速排序
7.1 基本思想:
通过一趟排序将待排记录分隔成独立的两部分。其中一部分记录的关键码均比另一部分的关键码小,则可分别对这两部分记录继续进行排序,以达到整个序列有序。
首先选取一个轴值。通过一趟排序,将待排序记录分割成独立的两部分。前一部分记录的关键码均小于或等于轴值;后一部分记录的关键码均大于或等于轴值。然后分别对这两部分重复上述方法。
7.2 如何实现划分:
设待划分的序列是r[s]~r[t]。设参数i,j分别指向子序列左右两端的下标,s和t。令r[s]为轴值。
- j从后向前扫描直到r[j]<r[i],将r[j]移动到r[i]的位置,使关键码小的记录移动到前面。
- i从前向后扫描直到r[i]>r[j],将r[i]移动到r[j]的位置,使关键码大的记录移动到后面。
- 重复上述过程,直到i=j。
7.3 递归出口:
若待排序序列中只有一个记录,则显然有序,否则进行一次划分后,再分别对所得的两个子序列进行快速排序。
7.4 代码实现:
int get_partition(int first,int end,int r[]){
int i=first,j=end,temp;
while(i<j){
while(r[i]<=r[j]&&i<j){
--j;
}
if(i<j){
temp=r[j];
r[j]=r[i];
r[i]=temp;
++i;
}
while(r[i]<=r[j]&&i<j){
++i;
}
if(i<j){
temp=r[j];
r[j]=r[i];
r[i]=temp;
--j;
}
}
return i;
}
void quick_sort(int r[],int first,int end){
if(first<end){
int pos=get_partition(first, end, r);
quick_sort(r, first, pos-1);
quick_sort(r, pos+1, end);
}
}7.5 性能分析:
时间复杂度与选取的轴值有关。
最好情况为:每次均选取到中间值作为轴值;最坏情况为:每次都选取到最大或最小元素最为轴值。
平均时间复杂度:
最坏时间复杂度:
采用“三者取中”来确定轴值,即:第一个元素,最后一个元素,最中间的元素中的中间值作为划分元。
空间复杂度:
8.选择排序
8.1 基本思想:
每趟排序在当前待排序序列中选出关键码最小的记录,添加到有序序列中。
8.2 代码实现:
void select_sort(int r[],int n){
int min,i,j,temp;
for(i=0;i<n-1;i++){
min=i;
for(j=i+1;j<n;j++){
if(r[j]<r[min]){
min=j;
}
}
if(min!=i){
temp=r[min];
r[min]=r[i];
r[i]=temp;
}
}
}8.3 性能分析:
时间复杂度:
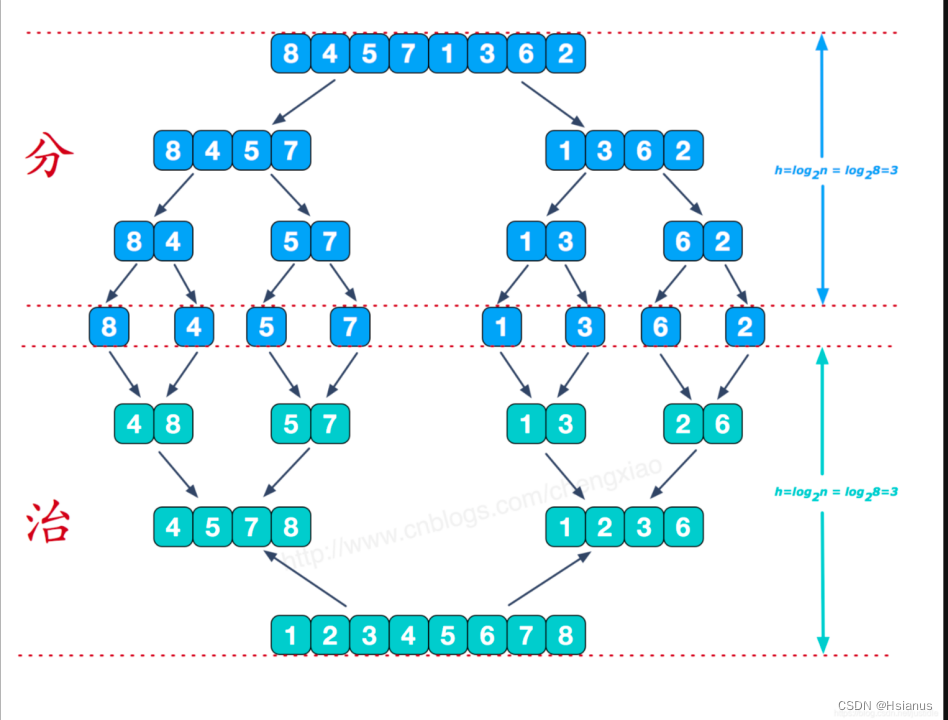
9.归并排序(稳定)
速度仅慢于快速排序,适用于分段有序的数列,为稳定排序算法。
9.1 基本思想(分治):
1)只包含一个元素的子表是有序表
2)将有序的子表合并
3)得到最终表
4) 需要一个辅助的临时数组
9.2 代码实现:
void merge_sort_recursive(int r[],int reg[],int start,int end){
if(start>=end){
return;
}
int mid=(start+end)/2;
merge_sort_recursive(r, reg, start, mid);
merge_sort_recursive(r, reg, mid+1, end);
//通过上述操作,已经获得了两个有序的子序列
//合并
int i=start,j=mid+1,k=start;
while(i<=mid&&j<=end){
if(r[i]<=r[j]){
reg[k++]=r[i++];
}
else{
reg[k++]=r[j++];
}
}
while(i<=mid){
reg[k++]=r[i++];
}
while(j<=end){
reg[k++]=r[j++];
}
for(i=start;i<=end;i++){
r[i]=reg[i];
}
}
void merge_sort(int r[],int n){
int reg[MAX_SIZE];//辅助数组
merge_sort_recursive(r, reg, 0, n-1);
}
9.3 性能分析:
时间复杂度:
空间复杂度:O(n)
10.排序方法比较
10.1 排序方法选择主要考虑:
1)待排序记录的数量
2)关键字的分布情况
3)对排序稳定性的要求
10.2 时间特性:
时间复杂度为
:快速、归并
时间复杂度为
:插入、冒泡、选择
待排序记录基本有序时:插入和冒泡可以达到O(n)
选择、归并排序的时间特性不随关键字的分布而改变。
稳定排序:插入、冒泡、归并
不稳定:快速、选择、希尔