频率补偿
为了维持系统稳定的条件,一般的做法是建立一个低频几点,并把第二个极点放在单位增益频率 f0db 附近。在线性稳压器中,这两个极点是输出极点Po和误差放大器极点Pe。在确定了哪一个极点应该是主极点后,补偿的目的就是理解系统中所有可能的干扰,并且保证环路在 f0db 处的相移在温度和工艺角变化下都不超过140°,更进一步,要保证系统的相移达到180°时的频率 f180° 距离f0db 10倍频程远,这有助于避免系统第一次启动或休眠后重启时过渡过程不稳定。
故根据主极点所在位置补偿方式分为输出端补偿和内部补偿。
线性稳压器的输出端补偿指的是低频主极点位于输出端。这通常发生在负载突变很大以至于需要较大输出电容的高功率系统中。
线性稳压器的内部补偿指的是系统的低频主极点在反馈环路内部,也就是说不在稳压器的输出端。这意味着,输出极点是第二低频极点因而是寄生极点。当为低功率系统设计线性稳压器时,工程师通常采用内部补偿,因为低功率系统的负载突变一般较小,因而稳压器需要的输出电容和旁路电容也较小。因为环路增益最终取决于高阻抗的贡献,因此,这个内部低频主极点通常位于误差放大器AE中,是PEA。
根据补偿方法分可以分为固定零点频率补偿、极点追踪补偿和零极点追踪频率补偿。
固定零点频率补偿
早期的LDO电路中,由于对供电模块片内集成的要求不高,通过LDO基本结构外接片外电容来稳定环路,外接电容和它自身的等效串联电阻产生一个单位增益带宽内零点来稳定环路,故这种传统的频率补偿方式称为固定零点频率补偿方案。如图4-1所示为传统LDO频率补偿的基本结构,图中 Ro,EA 表示误差放大器的等效输出电阻,误差放大器后接输出功率管,其中 ro,pow 表示功率管的输出电阻。CB和CL为频率补偿的外接电容,ESR为其等效串联电阻。图4-1中所示的LDO结构包含以下零极点,即
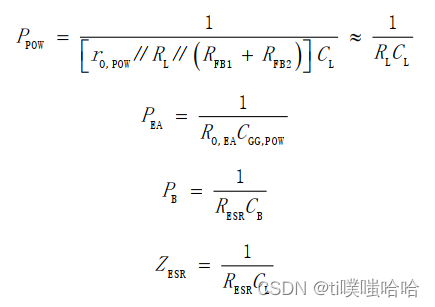
图4-1所示电路结构中的零极点,包括环路的主极点 PPow 片外电容产生的零点 ZESR ,以及次极点 PEA和极点 PB 。
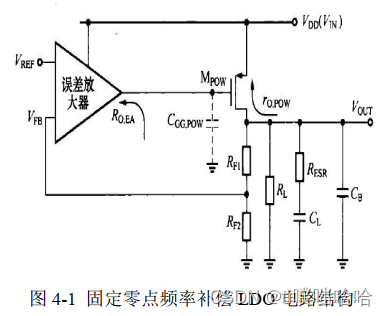
LDO要有较大的带载能力则输出端负载通常较小,要想使LDO的环路稳定则必然要使输出端极点 PPOW 作为LDO环路的主极点,PEA作为次极点,由此需要输出端外接较大的 频率补偿电容。这个次极点 PEA 常位于环路的单位增益带宽内,这会影响环路的稳定性。为消除这个次极点的影响,直接的方法就是通过外接电容自身的等效串联电阻ESR来共同产生一个接近于次极点 PEA 的零点 ZESR ,可以产生合适的ESR零点与次极点相抵消,于是稳定LDO环路。极点 PB 一般位于相对于主极点的高频段,并处于单位增益带宽外附近。
LDO在负载小电流的情况下,输出端产生的主极点较小,主极点与次极点PEA的距离较远,环路较稳定。LDO环路稳定性最坏的情况出现在负载大电流时,这时主极点随负载电阻的减小而增大,这种情况下单位增益带宽和次极点的相对位置决定着环路相位裕度,从而影响着环路的稳定性。
这种补偿方案不仅LDO最大输出电流较小,而且在LDO输出端需要外接电容而不易于集成,并且负载电容需要的等效串联电阻较难精确得到,再加上受工艺波动的影响,ESR零点补偿方案限制了LDO的应用。
极点追踪频率补偿
极点-极点追踪电路应用的一个主要原因是 LDO 环路中的各极点并不是固定不变的, LDO 输出极点随负载电流变化而变化,当负载电流减小时,输出极点PPOW会像高频移动,与PEA的距离逐渐逼近,会有不稳定的风险。当放大器尾电流增大时将会减小其输出阻抗,进而极点PEA像高频移动。因此只要将放大器的尾电流和 LDO的负载电流相联系,就能使 LDO 环路内部次极点跟随其输出端主极点变化, 从而保证 LDO 在应用的全范围内负载电流变化时都能保持次极点远离主极点,环路有足够的相位裕度而使环路稳定,故这种补偿方法称为极点-极点追踪频率补偿。
近年来一些顶级期刊上介绍的比较多的极点追踪补偿方法是缓冲器阻抗衰减技术。在误差放大器的第二级可以选择源跟随器结构, 由于源跟随器的低输出阻抗的特性, 误差放大器输出端后接源跟随器之后,其较大的输出阻抗经源跟随器后衰减为较小的阻抗。而源跟随器输出阻抗与功率管栅极电容并联,纵使功率管的栅电容较大,源跟随器较小的输出电阻也会使功率管栅极处产生的次极点外推到较高的频率,从而次极点不会影响环路的稳定性。源跟随器亦称作缓冲器, 它的输出阻抗与其电流直接相关, 可以通过改变其电流大小来改变输出阻抗,使功率管栅极的次极点跟随 LDO 输出端的主极点变化来保持环路稳定。
图 4-3 给出了一种简单实用的动态电流偏置的缓冲器结构,图 4-4 画出了极点追踪示意图。
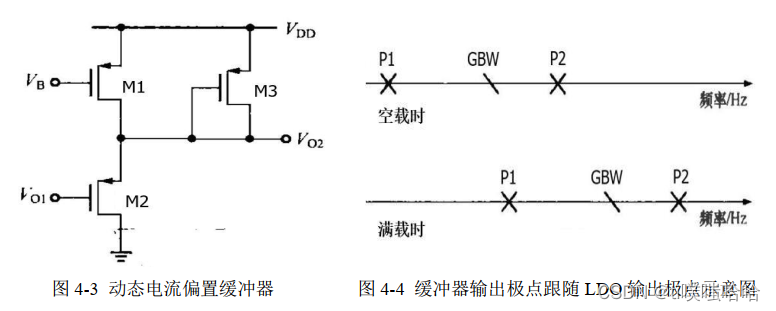
在图 4-3 中,当 LDO 输出负载电流增加时, 由于 M3 管的栅极和后级的输出功率管的栅极相并联, M3 管镜像负载电流,则动态偏置的 M3 管电流随负载电流增加。而 M3 管的电流是经由 M2 流出的, 则作为缓冲器的 M2 管的电流也同时增加,缓冲器的输出电阻的大小约为跨导的倒数,与其电流成反比,故缓冲器的输出电阻减小,从而缓冲器输出端的次极点 P2 会跟随 LDO 的输出端主极点 P1 增大。由此避免次极点 P2 进入单位增益带宽的频率范围而保证环路稳定。 如图 4-4 的LDO 负载由空载到满载的示意图示,尽管缓冲器驱动较大栅电容的功率管,但是由于次极点追踪主极点变化, 而且是跟随负载电流的自适应动态调节,使得 LDO环路在应用的全负载电流范围内次极点始终保持在单位增益带宽之外。
零极点追踪频率补偿
LDO 频率补偿的本质就是改变环路中零极点的分布,要么使次极点外推远离主极点,要么引入零点与次极点相抵消。以下简要叙述零极点追踪的频率补偿方法,其补偿思路类似于极点追踪补偿。零点补偿就需要在环路中引入适当的零点,零点的产生往往是通过在电路结构中增加电阻和电容串联的对地支路,而且需要设计合适的电容和电阻。
图 4-5 给出了一种 LDO 电路的零点-极点追踪结构。 图中补偿电容 Cz 连接于误差放大器的输出端与功率管之间,引入零点。 当电容 Cz 的左端连接到环路中其他节点时,也能形成类似的补偿效果。
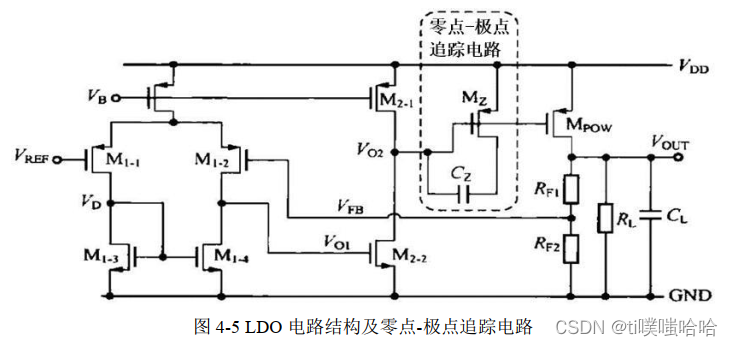
只要能产生一个零点抵消极点 Ppow,就能使 LDO 环路稳定。由于 Ppow 随着负载电流变化,因此, 用来抵消 Ppow 的零点也必须是动态的, 并有追踪的效果。 此结构中 Mz 管要工作在线性区,作用是产生一个由其栅压控制的阻值合适的等效电阻。 Mz 管漏端接电容而没有电流通路,故其漏源电压为零,只要控制其栅压导通便工作在线性区。 合理设置 Mz 管宽长比参数和电容 Cz的值,可以产生能抵消 LDO 输出端极点的零点,从而使环路稳定。
以上内容来自于下面的参考文献:
李国宏. 无片外电容型LDO的研究及频率补偿优化设计[D].电子科技大学,2021.DOI:10.27005/d.cnki.gdzku.2020.004798.

![[工具]java_sublime的快速使用](https://img-blog.csdnimg.cn/direct/6f1453662ba444f6a2623e08c116262b.png)